
你一定大概率梳过头发,但你想过这个动作有多复杂吗?(doge)

每根头发可能方向各异、软硬不一,就连最简单的梳直这件事,也需要手腕的力度控制和方向把握。这些对人类来说再平常不过的小事,对机器人来说并不容易。
不过最近,日本东京大学JSK实验室的研究团队找到了突破口——他们开发出一套基于AI的美发机器人系统,在精准控制和还原发型方面取得了较为显著的进步。
▍机器人如何掌握梳头密码?发根是关键
这套系统最大的亮点在于创新性提出了“发根中心路径规划”的概念。和传统方法不同,它首先会识别每根头发的发根位置,然后基于目标发型图片,为每根头发规划出一条最优的梳理路径。
系统的工作流程非常容易理解:首先通过图像对比当前发型和目标发型的差异,生成一张发丝方向差异热力图;接着锁定需要调整的头发,并为每根头发规划出从发根到发梢的精确梳理轨迹;最后将这些二维轨迹转化为机器人可执行的三维动作路径。
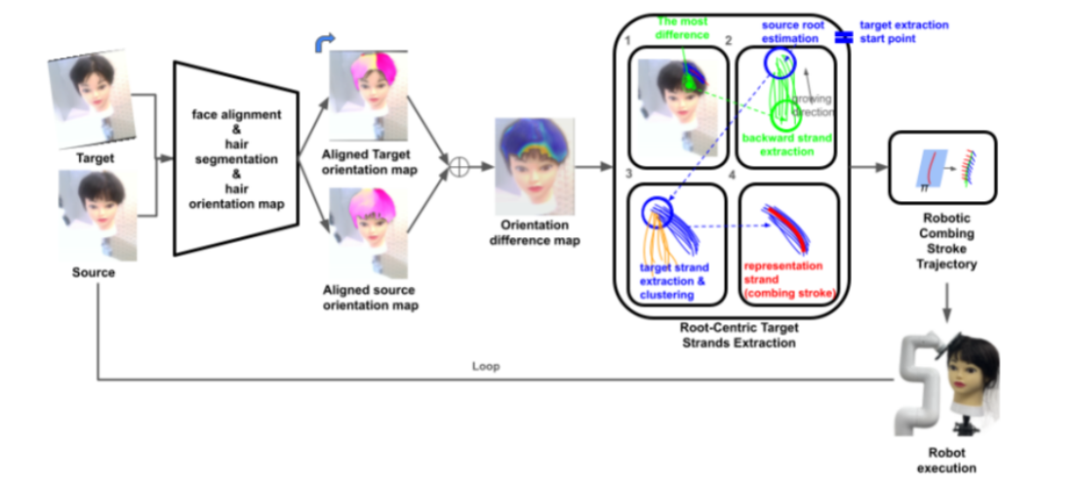
在目标发型比对阶段,系统使用MediaPipe进行面部对齐,确保目标发型图片能够准确映射到当前头型上。随后,通过形态学腐蚀处理(使用大小为15的结构元素)对头发区域进行精细化处理,有效降低了边缘噪声的影响。
研究团队借助深度学习技术HairStep来提取头发走向,确保系统能精准捕捉到每根头发的朝向。这种基于发根的路径规划方式,让机器人能更好地控制头发,实现更精准的造型效果。
在发根中心梳理路径的生成机制中,系统会首先提取需要调整的头发,确定其发根位置。随后,使用DBSCAN聚类算法,根据空间位置和方向特征,将目标发型中的头发分成不同簇。通过选择最大簇的平均方向作为参考,系统能够生成最优的梳理路径。
▍真实战力测试:新系统梳头整体性能提升
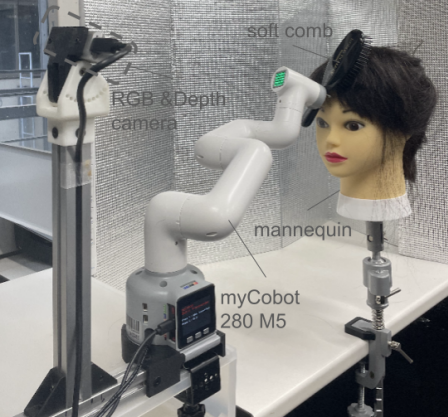
为了验证系统的实际效果,研究团队用myCobot 280 M5机器人搭配软毛梳进行了大量测试。实验对象是一个装配了硬质假发的人体模型头。
为确保实验的科学性,每次测试前都会对假发喷水处理,并从上至下统一梳理,建立稳定的初始状态。
实验结果如下:
新开发的AI美发机器人系统在发型还原测试中表现出色,其方向差异均值仅为0.4877弧度,且标准差较小(0.1101弧度),说明系统性能稳定。相比之下,传统随机采样方法的方向差异均值较大(0.7255弧度),且标准差也稍高(0.1336弧度)。因此,新系统在整体性能上提升了32.8%,能够更精准地还原目标发型。
更值得关注的是系统的收敛性能。通过迭代曲线可以清晰看到,基于发根中心路径规划的新方法能够快速稳定地向目标发型靠拢,而传统随机方法则表现出明显的波动性。
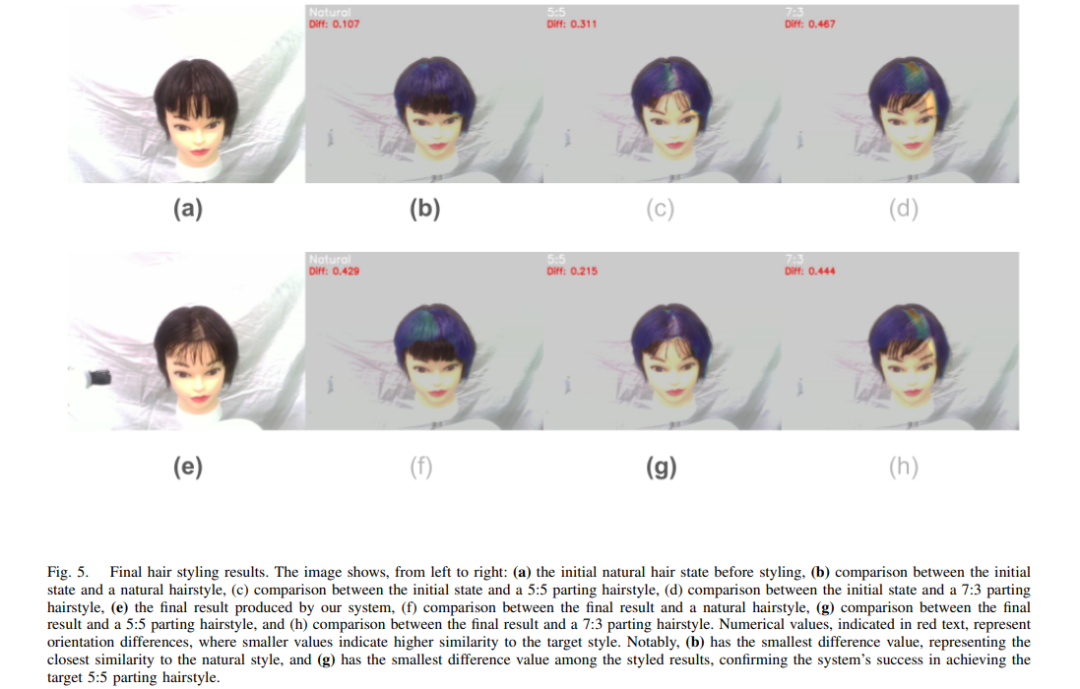
该系统最引人注目的是其实际应用能力。研究团队成功展示了系统在多种发型上的适应性,包括自然垂落、5:5分线和7:3分线等不同造型。尤其在5:5分线发型的还原测试中,系统展现出更好的表现力。
通过热力图可视化结果显示,最终造型与目标发型的方向差异主要集中在蓝色区域,这意味着绝大部分区域都达到了极高的还原度。系统不仅能准确识别发型特征,还能精准执行梳理动作,真正实现了”看图造型”。
值得一提的是,系统采用了基于RANSAC算法的姿态计算方法,能够准确估算机器人末端执行器的Z轴方向。这种精确的空间定位能力,让机器人能更好地适应头部的曲面结构,确保梳理动作的精准性。
▍机器人美发师的进化之路还差哪几步?
虽然取得了突破性进展,但研究团队也坦承系统仍存在一些待优化的空间。比如,目前的刷子力度控制还相对简单,未来可以引入实时反馈机制,根据头发的响应动态调整刷子力度和方向。
此外,系统在处理后梳等不在单一视角可见的发型时还存在局限。这提示未来需要开发更复杂的3D几何结构感知能力,让系统能更全面地理解和处理各种复杂发型。
研究团队还提到,仅靠梳理这一动作难以实现某些复杂造型。未来可能需要集成喷水、定型等辅助工具,进一步拓展系统的造型能力范围。
或许随着技术的不断完善,未来“机器人美发师”会成为现实,为我们的美容美发体验带来改变。

团队表示,下一步他们将着重解决实时反馈、3D路径规划等关键技术难点,进一步提升系统的实用性和适应性。这项突破性的研究成果已经发表在arXiv预印本平台上,引发了学术界的关注。
此外,看似简单的梳头动作,折射出机器人柔性操作领域的诸多技术挑战。这个研究不仅提供了一种新的思路,也为工业机器人处理柔性物体提供了可借鉴的技术范式。未来,随着传感器、算法和控制技术的进步,这套方案或许会在更多领域有所突破。
论文链接:
https://arxiv.org/abs/2501.10991
(文:机器人大讲堂)