

新智元报道
新智元报道
【新智元导读】DeepMind再放大招!继AlphaGo之后,他们利用改进的强化学习技术,让AI在《我的世界》类游戏Craftax中超越了人类专家水平。AI仅需少量数据就能高效学习。本文将深入解读DeepMind的最新研究,揭秘AI如何“脑补”世界,实现超越SOTA的性能,甚至让我们看到了通往AGI的曙光。
DeepSeek R1与OpenAI o系列模型的爆发,掀起了人工智能领域的新一轮浪潮。
甚至让我们看到了通往AGI的曙光。
这些性能强大模型的背后都离不开一个关键技术——强化学习(Reinforcement Learning)。
谷歌的DeepMind团队在这方面一直很强,轰动全球的「人机大战」(李世石对战AlphaGo)就出自他们团队之手。
近日,DeepMind研究团队又整了个大的!
他们使用改进的强化学习技术,在类似Minecraft(我的世界)游戏中,使智能体的游戏水平甚至超过了人类专家!
论文地址:https://arxiv.org/pdf/2502.01591
强化学习通过让AI不断尝试和犯错来学习,就像人在学习新技能一样。
AI在环境中行动,根据结果的好坏来调整自己的策略。
那些在环境中一边尝试,一边学习,收集数据(观察和奖励),然后更新自己策略的强化学习算法被称作在线强化学习。
在线强化学习算法通常不预先「建模」,AI看到什么就做什么,这种方法称为无模型强化学习(MFRL)。
但这种方法需要收集大量环境数据。
因此,有人提出了基于模型的强化学习(MBRL),很显然它试图减少训练所需的数据量。
MBRL会先学习一个「世界模型」(WM),就像在脑海中模拟出一个世界,然后在这个模拟的世界里进行「想象」和「规划」。好比AI自己先在脑子里模拟一下,然后再行动。
为了评估强化学习算法的效率,大家通常使用Atari-100k基准测试,查看算法在Atari游戏中使用不超过10万帧训练数据时的表现。
但是,Atari游戏的确定性比较高,AI很容易记住一些操作,而不是真正学会泛化。而且,Atari游戏往往只侧重于一两种技能,不能很好地考察AI的综合能力。
为了训练出能力更全面的AI,谷歌DeepMind的研究团队选择了Crafter这个环境。
Crafter是一个2D版的《我的世界》,具体来说,他们用的是Craftax-classic环境,它是Crafter的快速复刻版。
Craftax-classic环境有几个很好的特点:
-
每次游戏的环境都是随机生成的,AI需要应对不同的挑战。 -
AI只能看到局部视野,就好像只能看到屏幕的一部分,而不是整个地图。 -
这是一个以成就层级来设定奖励信号的体系,需要进行深入且广泛的探索才能达成。
DeepMind研究团队的这篇论文主要研究了如何在Craftax-classic环境中改进基于Transformer世界模型(TWM)的强化学习方法。
研究人员主要从三个方面入手:如何使用TWM、如何将图像转换成TWM的输入以及如何训练TWM。
结果让人惊喜!
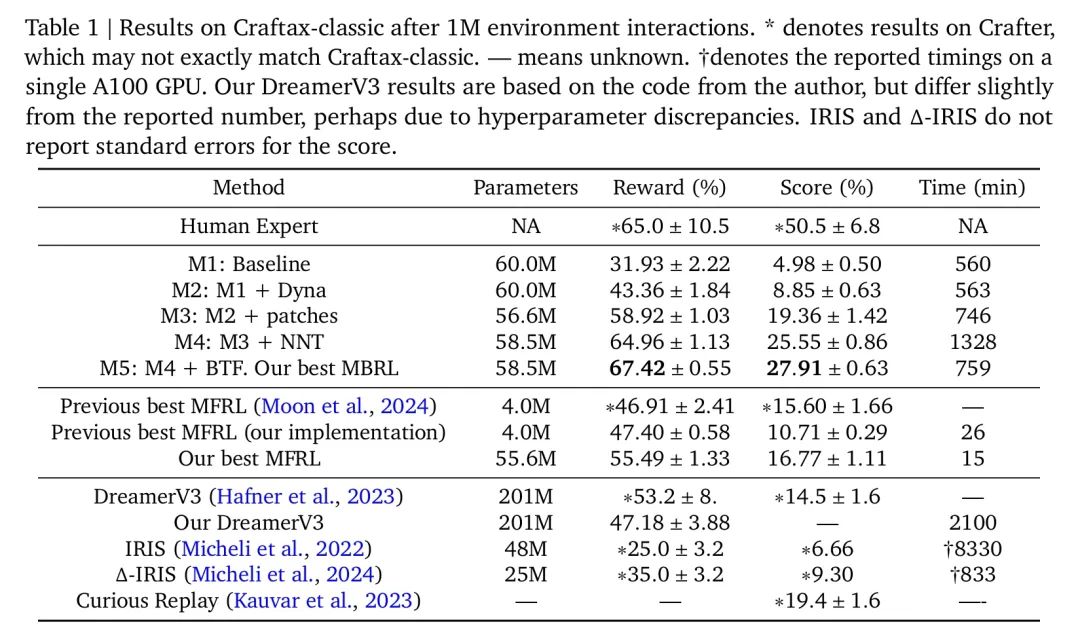
研究团队的方法让智能体在仅用100万步环境交互的情况下,就取得了Craftax-classic 67.42%的奖励和 27.91%的得分,这比之前的最佳研究成果(SOTA)——53.20%的奖励和19.4%的得分——都有了显著提升。
智能体的表现甚至超越了人类专家!相当炸裂。
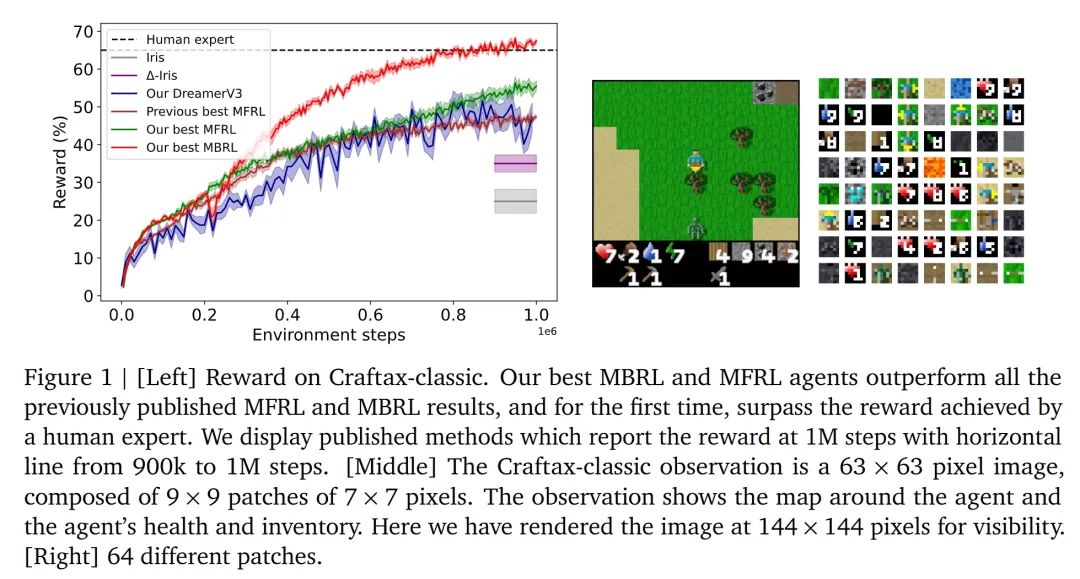
下图1展示了论文中提出的MBRL方法在Craftax-classic环境中的性能,其中左图展示了不同算法随着环境交互步骤的增加所获得的奖励。
中间图展示了Craftax-classic的画面,即一个63×63像素的图像,包含智能体周围的地图以及智能体的生命值和物品栏。右图显示了NNT(最近邻标记器)提取的 64 个不同的图像块,这些图像块用于TWM(Transformer 世界模型)的输入。
相关工作
背景规划在模型外部(即决策发生之前)使用世界模型(WM)生成想象轨迹,进而训练策略。而决策时规划在做决策的时刻利用WM进行前瞻搜索。
由于决策时规划速度较慢,特别是使用大型世界模型如Transformer模型时。所以,论文侧重于背景规划。
另一个需要关心的问题是世界模型(WM)。世界模型分为生成式世界模型和非生成式世界模型。
生成式世界模型可以生成(或想象)未来的观察结果,并以此辅助策略学习,从而提高强化学习的效率,而非生成式世界模型则仅使用自预测损失进行训练。
相对之下,生成式世界模型更适合背景规划,因为它能方便地将真实和想象数据结合进行策略学习。
训练方法
这个基线模型在环境中训练了100万步后,达到了46.91%的奖励和15.60%的分数。
研究团队在此基础上进行了两方面的改进:一是增大模型规模,二是在策略中加入RNN(具体来说是GRU)来提供记忆能力。
有趣的是,他们发现如果只是单纯增大模型规模,反而会降低性能。但当更大的模型与精心设计的RNN相结合时,性能会有所提升。
对于RNN,研究团队认为保持隐藏状态的维度足够小至关重要,这样才能让记忆只关注当前图像无法提取的、真正重要的历史信息。
通过这些结构上的改动,模型的奖励指标提升到了55.49%,得分则达到了16.77%。性能上超过了更为复杂、运行也更慢的DreamerV3(其奖励为53.20%,得分为 14.5%)。
在性能提升的同时,成本也降低了。模型在一张A100 GPU上对环境进行100万步训练仅需约15分钟。
使用Dyna方法进行预热
接下来就是论文提出的核心改进之一,即如何有效地利用真实环境数据和世界模型(WM)生成的虚拟数据来训练智能体。
与通常只使用世界模型生成的轨迹进行策略训练不同,研究者受到Dyna算法的启发,改进之后以适应深度强化学习。
Dyna方法将真实环境中的轨迹数据和TWM生成的想象轨迹数据混合起来训练智能体。将世界模型视为一种生成式数据增强
智能体首先与环境交互,收集真实的轨迹数据,并立即用这些数据来更新策略。之后,智能体使用世界模型在想象中生成轨迹,并用这些想象数据来进一步更新策略。
这种混合使用真实数据和虚拟数据的机制,可以被看作是一种生成式数据增强的方式。
论文强调,世界模型的准确性对于策略学习至关重要。
为了确保世界模型足够准确,避免其不准确的预测「污染」训练数据,研究者提出在开始使用想象轨迹训练策略之前,先让智能体与环境交互一段时间。
这个过程被称为「预热(warmup)」。具体来说,就是只有在智能体与环境交互达到一定步数之后,才开始使用世界模型生成的轨迹来训练。
实验表明,移除预热步骤会导致奖励大幅下降,从67.42%降至33.54%。此外,仅仅使用想象数据训练策略也会导致性能下降到55.02%。
图像块最近邻分词器
不同于常规的使用VQ-VAE方法来在图像和tokens之间进行转换。
在论文中,研究团队提出了一种新的图像标记化(tokenization)方法。用于将图像转换为Transformer世界模型(TWM)可以处理的token输入。
研究团队利用Craftax-classic环境的一个特点,即每个观察图像都是由9×9个7×7大小的图像块组成。
因此,他们首先将图像分解为这些不重叠的图像块(patches)。然后,独立地将每个图像块编码为token。
在将图像块分解的基础上,论文使用一个更简单的最近邻标记器(Nearest-Neighbor Tokenizer,NNT)来代替传统的VQ-VAE3。
NNT的编码过程类似于最近邻分类器,它将每个图像块与一个代码本中的条目进行比较。
如果图像块与代码本中最近的条目之间的距离小于一个阈值,则将该条目的索引作为token;否则,将该图像块作为一个新的代码添加到代码本中。
与VQ-VAE 不同,NNT的代码本一旦添加条目,就不再更新。这意味着代码本是静态的,但可以不断增长。
解码时,NNT只是简单地返回代码本中与token索引相对应的代码 (图像块)。
这种静态但不断增长的代码本使得TWM的目标分布更加稳定,大大简化了TWM的在线学习过程。
实验结果显示,在图像块分解的基础上,用NNT替换VQ-VAE可以显著提高智能体的奖励,从58.92%提升到64.96%。
不过,NNT对图像块的大小比较敏感,如果图像块的大小不合适,可能会影响性能。而且如果图像块内部的视觉变化很大,NNT可能会生成一个非常大的代码本。
块状教师强制
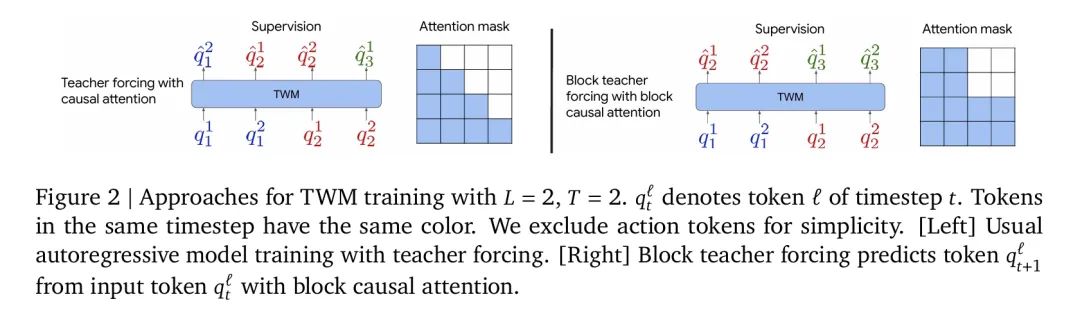
在通常的做法中,TWM通常采用教师强制来训练,论文的研究团队则提出了一种更有效的替代方案,称为块状教师强制(block teacher forcing, BTF)。
这个方案同时修改了TWM的监督方式和注意力机制:当给定前面的全部token后,BTF会并行预测下一时间步中的所有潜在token,从而不再依赖当前时间步已生成的token。
下图2清晰地展示了BTF如何通过改变注意力模式和监督方式来改进TWM的训练。
传统的教师强制自回归地预测每个token,而BTF则并行预测同一时间步的所有token,从而提高了训练速度和模型准确性。
实验表明,与完全自回归(AR)的方法相比,BTF能得到更准确的TWM。
在本实验中,BTF将奖励从64.96%提升到了67.42%,从而获得了表现最优的基于模型的强化学习(MBRL)智能体。
一举超越了人类专家的表现!(见表1)
实验结果
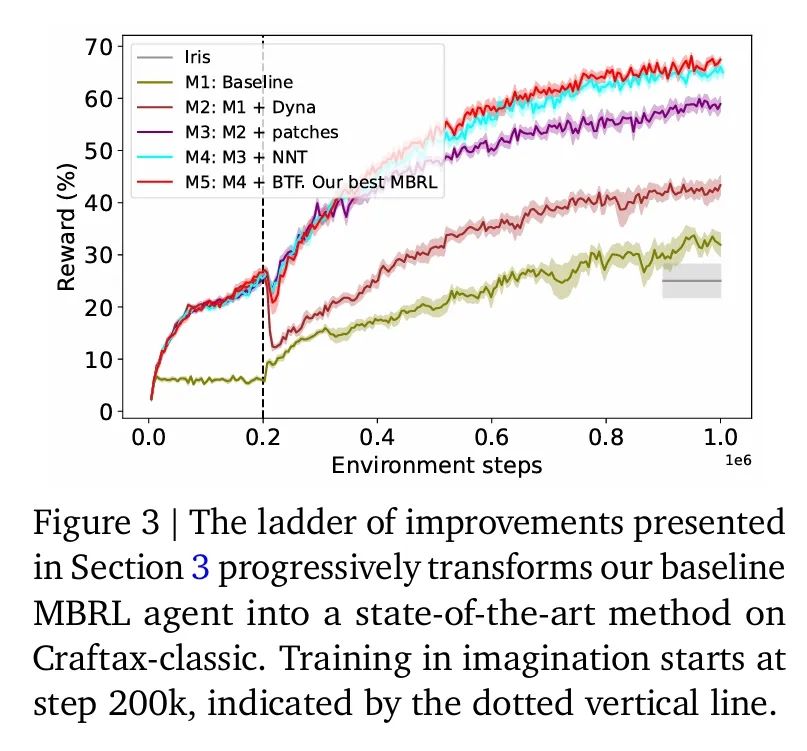
在论文中,智能体按照研究者所采用的改进措施进行排序,形成了一个「MBRL 阶梯」,具体如下:
M1: Baseline:基准MBRL智能体,使用了VQ-VAE进行tokenization,其奖励为31.93%,优于IRIS的25.0%。
M2: M1+Dyna:在M1的基础上,使用Dyna方法,即混合使用真实环境数据和TWM生成的想象数据来训练策略,奖励提升至43.36%。
M3: M2+patches:在M2的基础上,将VQ-VAE的tokenization过程分解到各个图像块 (patches) 上,奖励进一步提升至 58.92%。
M4: M3 + NNT:在M3的基础上,用最近邻标记器 (NNT) 替换VQ-VAE,奖励提升至 64.96%。
M5: M4 + BTF:在M4的基础上,引入块教师强制 (BTF),最终的奖励达到67.42%(±0.55),成为论文中最佳的 MBRL智能体。
下图3清晰地展示了每一步改进带来的性能提升。
与现有方法比较
研究团队这次性能最优的模型M5创造了新的SOTA成绩,奖励达到67.42%,得分达到27.91%。
这是首次超过人类专家的平均奖励水平(该人类水平基于5名专家玩家玩了100局所测得)。
需要指出的是,尽管模型在奖励上已超越了人类专家,但得分仍明显低于人类专家水平。
消融实验
下图5可视化地展示消融研究的结果,验证了论文提出的各个改进措施的重要性。
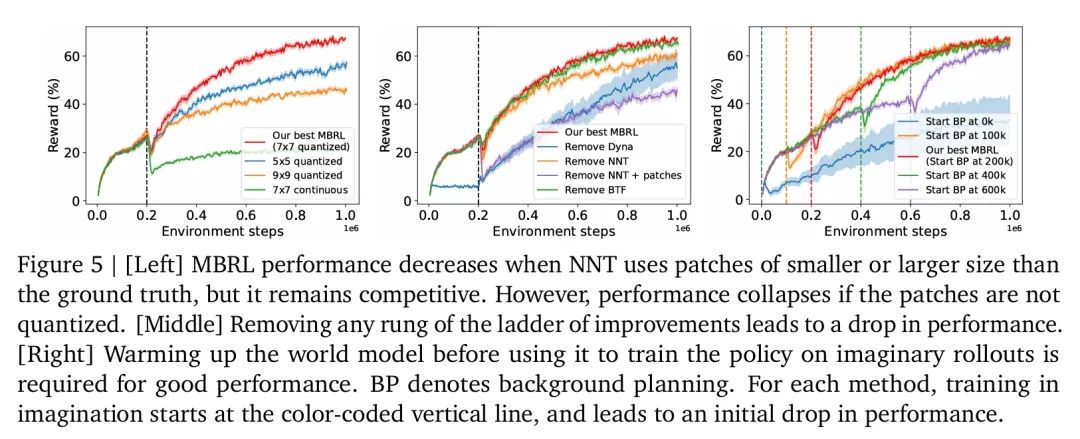
模型如果过早地开始在想象数据上训练,性能会因TWM的不准确而崩溃。只有在智能体与环境交互足够长时间,并获得足够数据来训练可靠的WM后,使用想象数据进行训练才是有效的。
去除MFRL智能体中的RNN或使用较小的模型都会导致模型性能下降。
比较TWM的生成序列
研究者比较了三种不同的世界模型 (TWM) 的生成轨迹质量,这些模型分别是M1(基线模型)、M3(加入了Dyna和图像块分解的模型)以及M5(最佳模型,包含了所有改进)。
为了进行评估,研究者首先构建了一个包含160条轨迹的评估数据集,每条轨迹长度为20。然后,他们使用每个TWM模型,从相同的起始状态和动作序列出发,生成对应的想象轨迹。
评估的关键指标是通过训练一个CNN符号提取器,来预测真实轨迹和TWM生成轨迹中的符号,并计算预测的符号准确率。
这种方法能够深入了解模型在多大程度上捕捉到了游戏的核心动态。
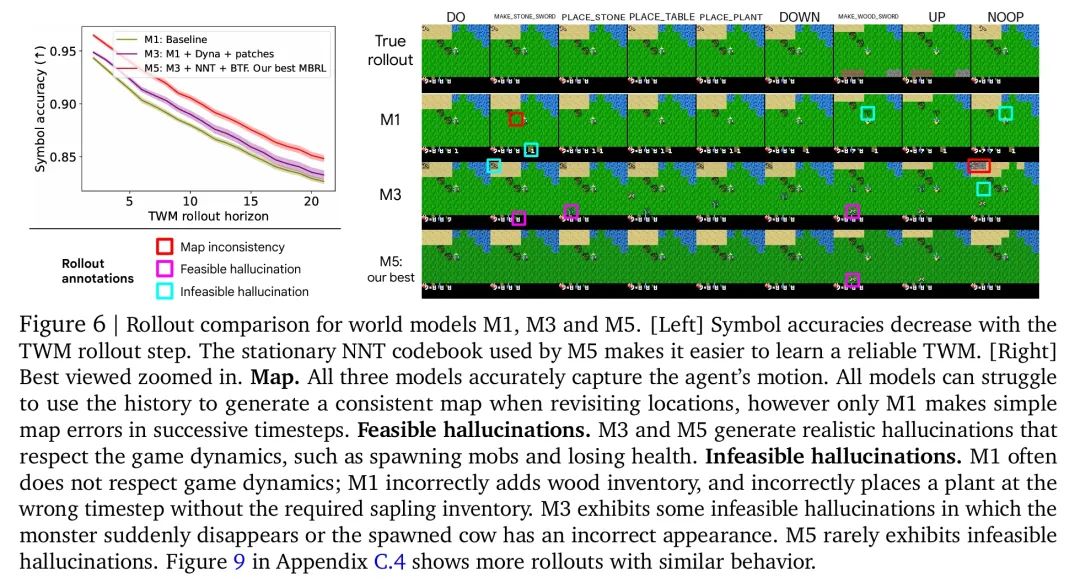
定量评估
通过定量评估,研究团队发现符号准确率随着TWM生成轨迹步数的增加而下降,这种下降是由于误差的累积导致的。
M5模型由于其采用了最近邻标记器(NNT),保持了所有时间步中最高的符号准确率,表明其能够更好地捕捉游戏动态,并且NNT使用的静态代码本简化了TWM的学习过程。
定性评估与分析
除了定量评估外,研究团队还对TWM生成的轨迹进行了定性分析。
通过视觉检查,他们观察到了三种现象:地图不一致性、符合游戏规则的幻觉以及不符合游戏规则的幻觉。
M1模型在地图和游戏动态方面都存在明显的错误,而M3和M5模型能够生成一些符合游戏规则的幻觉,例如出现怪物和生命值变化。
M3模型仍然会产生一些不符合游戏规则的幻觉,例如怪物突然消失或生成的动物外观错误,而M5模型则很少出现这种不合理的幻觉。
定性分析表明,尽管所有模型都存在一定的误差,但M5模型在保持游戏动态一致性方面明显优于其他模型,体现了其学习到的世界模型质量的提升。
下图6表明,NNT和BTF等改进措施对于提高TWM学习效果的重要性,最终促进了MBRL智能体性能的提升。
Craftax完整版本测试结果
研究团队还比较了多种智能体在Craftax的完整版本(Craftax Full)上的性能。相比 Craftax-classic,这个完整版在关卡数量和成就设置上都有显著提升,难度更高。
此前的最佳智能体只能达到2.3%的奖励,而DeepMind团队的MFRL智能体取得了4.63%的奖励,MBRL智能体则更是将奖励提高到5.44%,再次刷新了SOTA纪录。
这些结果表明,DeepMind团队所采用的训练方法能够推广到更具挑战性的环境。
结论与下一步工作
这些改进应用于背景规划:带有预热的 Dyna 方法、图像块最近邻标记化 (NNT)以及块教师强制 (BTF)。
这些改进措施结合起来,使得MBRL智能体在Craftax-classic基准测试中取得了显著更高的奖励和分数,首次超越了人类专家的奖励水平。
论文提出的技术也成功地推广到了更具挑战性的Craftax(full) 环境中,取得了新的SOTA结果。
下一步工作
DeepMind研究团队未来将研究如何将这些技术推广到Craftax之外的其他环境,以验证其通用性。探索使用优先经验回放来加速TWM的训练,以提高数据利用效率。
团队还考虑将大型预训练模型 (如SAM和Dino-V2) 的能力与当前的标记器结合起来,从而获得更稳定的代码本,并减少对图像块大小和表观变化的敏感性。
为探究无法生成未来像素的非重构型世界模型,团队还计划改造策略网络,使其能够直接接收TWM生成的潜变量 token,而不是像素。
(文:新智元)