
机器人的触觉,终于不用靠堆传感器了。
剑桥大学团队在机器人领域顶级期刊Science Robotics上发表的最新研究,用一块明胶基水凝胶——对,就是做果冻的那种材料——实现了172万个信息通道的触觉感知。
不是在柔软基底上密密麻麻贴传感器,而是让整块材料变成一个巨型传感器。
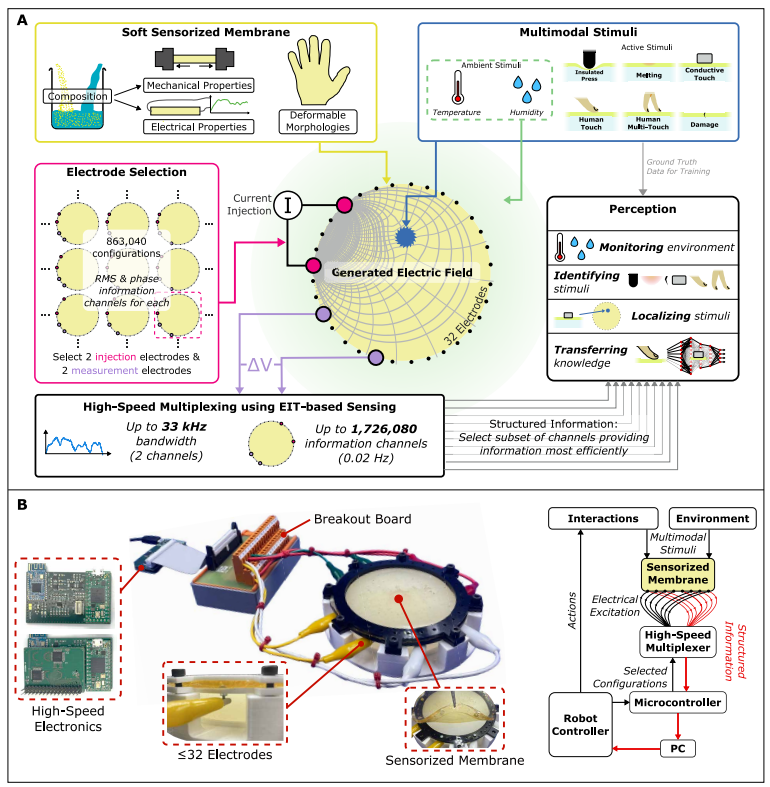
研究人员只在材料边缘布置32个电极,通过电阻抗断层成像技术(EIT),就能监测863,040条不同的电流路径。这套系统可以同时识别6种不同类型的刺激:人体触摸、导电物体接触、绝缘物体按压、局部加热、损伤,甚至多点触摸。
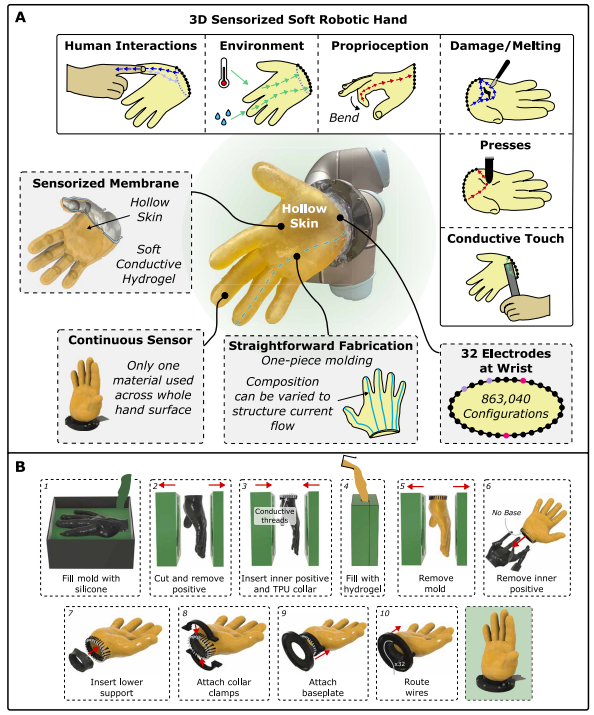
最炸裂的是,他们还用这种方法做了一只完整的机器人手。整只手完全由水凝胶制成,电极全部集中在手腕处。即便触摸指尖这种远离电极的位置,系统也能实现25毫米精度的定位。

▍为什么不能一直堆传感器?
做过机器人的都知道,传统电子皮肤的痛点有多痛。
论文开篇就指出了现有多模态机器人皮肤的三大问题:制造繁琐、软硬界面容易损坏、信号干扰严重。
传统方法依赖于在柔性基底中嵌入多个小型传感器组件。这种方法需要在大表面上分布和连接多个小组件,不仅制造过程复杂,还限制了皮肤只能做成简单形状。由于存在多个软硬界面,这些皮肤通常无法拉伸,或者极易损坏。
剑桥团队的思路完全不同。他们把整块水凝胶变成了一个连续的传感场。通过在材料周围施加交流电,在内部形成复杂的电场分布。任何外界刺激——触摸、加热、损伤——都会改变局部导电性,进而改变电场。
根据机理分析,不同刺激改变导电性的方式各不相同:
-
用绝缘物体按压或切割损伤,都会局部降低导电性,导致更少的电流流过该区域
-
熔化和导电物体接触都会局部增加导电性
-
单指人体触摸通过分流效应将少量电流导入地面
-
多指触摸则为电流提供了新的流通路径
实验数据显示,在特定电极配置下,损伤产生了28mV的电压变化(最大),绝缘按压只有2.2mV,而导电触摸和熔化分别产生了-26mV和-19mV的负向变化。
▍172万个通道,怎么处理?
32个电极,理论上可以形成863,040种不同的四电极测量组合。考虑幅值和相位两个维度,信息通道数达到172万个。
数据太多也是烦恼。根据论文数据,如果全部监测,帧率只有0.02Hz。但如果只监测一个配置,帧率可以达到33kHz。
研究团队采用了数据驱动的配置选择方法。他们先在圆形测试膜上进行实验,对7种刺激(包括一种对照刺激)在3个位置进行测试,记录所有1680个配置的响应。
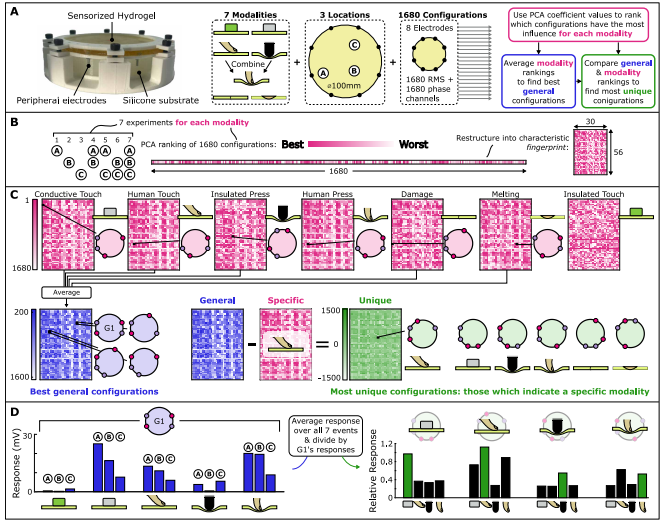
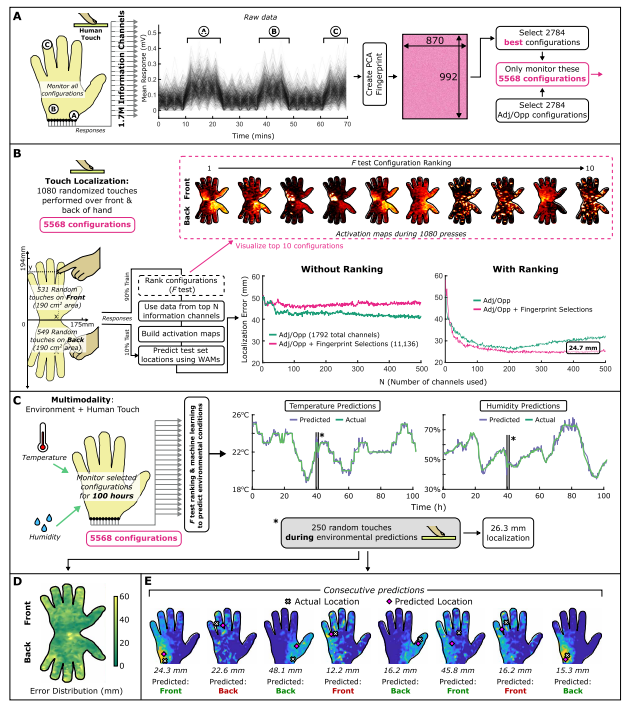
通过主成分分析(PCA),他们为每种刺激类型生成了特征“指纹图谱”。这些图谱显示了哪些电极组合对特定刺激最敏感。实验显示,通过这种方法识别出的“通用”最佳配置和每种模态的”独特”配置各不相同,说明不同刺激确实产生了可区分的电场变化模式。
在定位实验中,研究人员用机械臂在膜上随机放置了1000次钢螺母。结果显示,使用F检验方法筛选的50个最佳配置,定位效果优于使用150个传统相邻/相对配置。误差可以快速收敛到10毫米以下。
更有意思的是跨模态知识迁移。在导电物体接触数据上训练的模型,其学到的主成分映射可以直接应用于其他模态。绝缘按压在同一映射中产生了相反方向的响应向量,这与其相反的导电性变化机制一致。
▍从平面到手形:复杂3D形状的感知突破
把技术从实验室的圆片扩展到实际的3D形状,是研究的重头戏。
研究团队制作了一个成人大小的空心手套,完全由水凝胶制成,32个电极全部集中在手腕位置。制造过程包括:先用硅胶在3D打印手模上翻模,插入较小的内模,添加含导电线的柔性套管,然后灌入水凝胶。凝固后取出内模,得到空心结构。
实验数据相当亮眼:
-
手的表面积为38,000平方毫米
-
测试了1080个随机触摸位置
-
使用指纹识别方法预选了2784个配置
-
平均定位误差24.7毫米(使用500个F检验筛选的通道)
-
仅用10个最优配置,定位误差就能控制在40毫米以内
在100小时的环境监测实验中,系统准确追踪了19-25°C的温度变化和38-72%的湿度变化。同时进行的250次触摸测试,平均定位误差为26.3毫米。
由于电极都在手腕,离指尖最远,那里的灵敏度最低。但即便如此,系统仍能检测到指尖的轻触。当手指弯曲时,材料拉伸改变了局部电阻,提供了本体感受信息。
使用筛选后的配置,数据采集速率可以从监测所有通道时的0.02Hz提升到监测10个通道时的3.3kHz。
当然,本研究也坦诚地讨论了局限性。水凝胶在典型环境温湿度范围内会有机械性能波动,最高工作温度相对较低。湿度影响可以通过添加非渗透覆盖层来减轻,但这会引入多层结构的脱层风险。
这项研究的核心贡献在于提出了一种新的传感器设计范式:用简单材料配合智能算法,而不是不断增加硬件复杂度。这种方法不仅降低了制造难度,还通过信息冗余提高了系统鲁棒性。
从一块看似普通的水凝胶,到拥有86万条感知通道的智能皮肤,这个转变的背后,是人类对”感知”这一概念的全新理解。也许真正的智能,不在于硬件的复杂,而在于如何从简单中提取复杂,从混沌中发现秩序。
论文地址:
https://www.science.org/doi/10.1126/scirobotics.adq2303
(文:机器人大讲堂)