

知乎相关信息显示,黄一正在打造第二代双足机器人平台AlexBotmini,依然会延续低成本研发方式,目前公布的CNC与其他硬件成本来看,整机价格仅15000元。
第二代双足机器人平台AlexBotmini
Alexbot_mini是一款全开源的双足机器人(包含机械,硬件,控制,算法),重点在于研究步态算法以及轻松部署步态降低RealityGap而设计的。

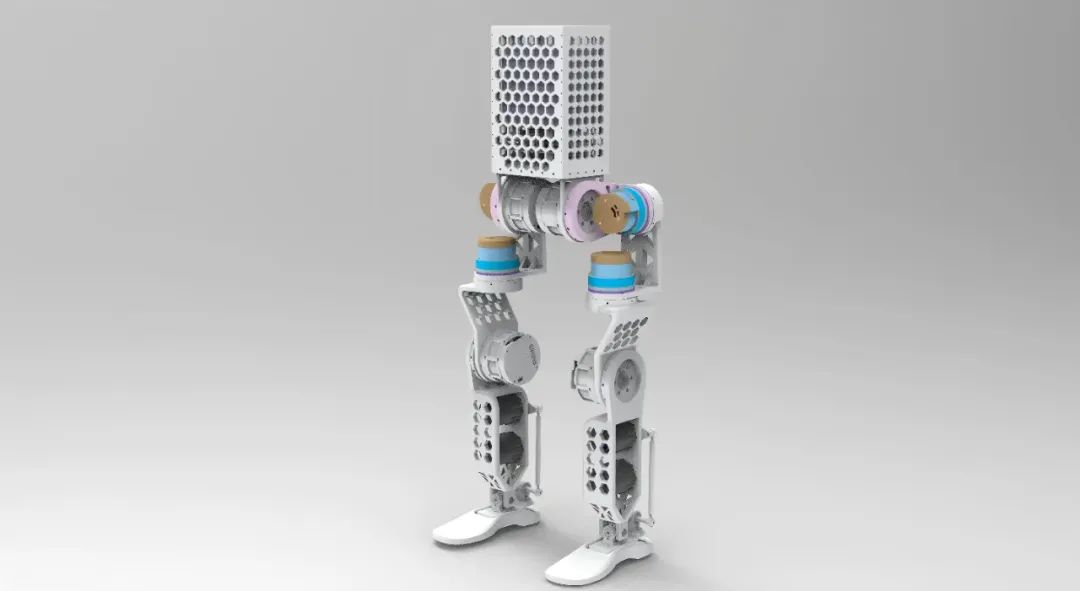
AlexBotmini上半身设计
整机Alexbotmini下半身长度700mm,上半身长度500mm,整体符合人体比例设计。目前该项目得到了FFTAI傅利叶智能科技有限公司的赞助。
▍三款傅利叶关节电机 Alexbotmini本体硬件解密
AlexBotmini的双腿包含了12个自由度,全长700mm,预计重量低于30kg,与人体结构比例相当。在电机选型上,项目团队选用了FFTAI一体化关节模组,具体型号为FSA80-29E、FSA60-43E和FSA45-30E。
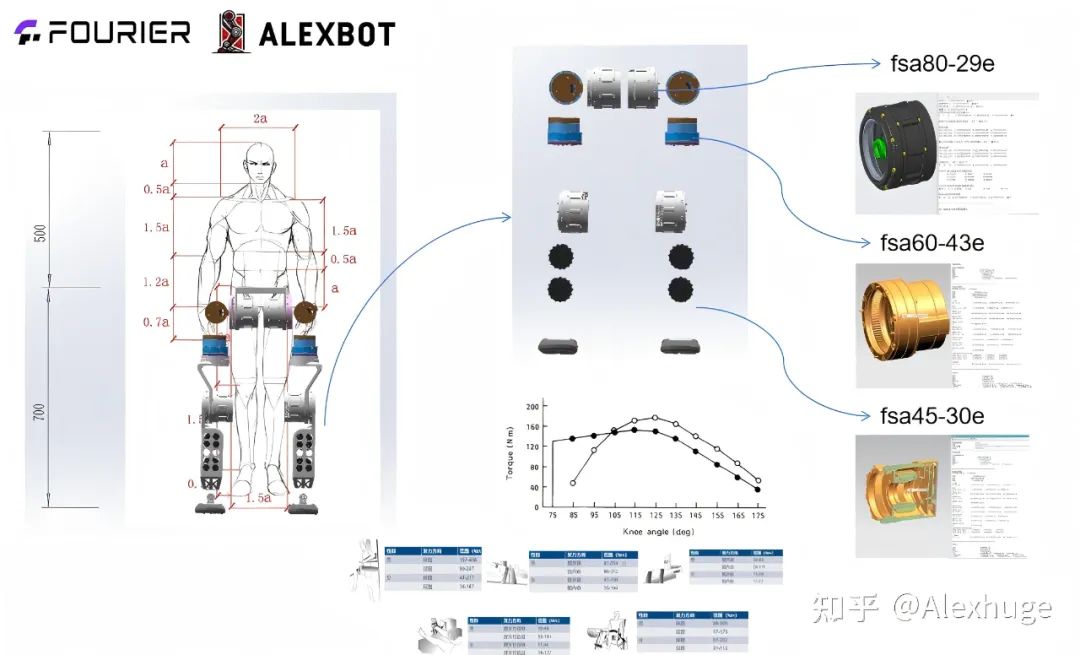
傅利叶三款关节电机结构分布图
其中,FSA80-29E和FSA60-43E均采用了双级行星减速器,进一步提升了扭矩性能。

FSA80-29E的额定扭矩为32NM,峰值扭矩高达96NM,额定转速为100RPM;而FSA60-43E的额定扭矩为17NM,峰值扭矩为51NM,额定转速为59RPM。
对于小腿部分,为了优化惯量设计,选用了FSA45-30E电机,并采用了双电机朝向后方、通过板簧连接至脚底结构的并联设计方案。
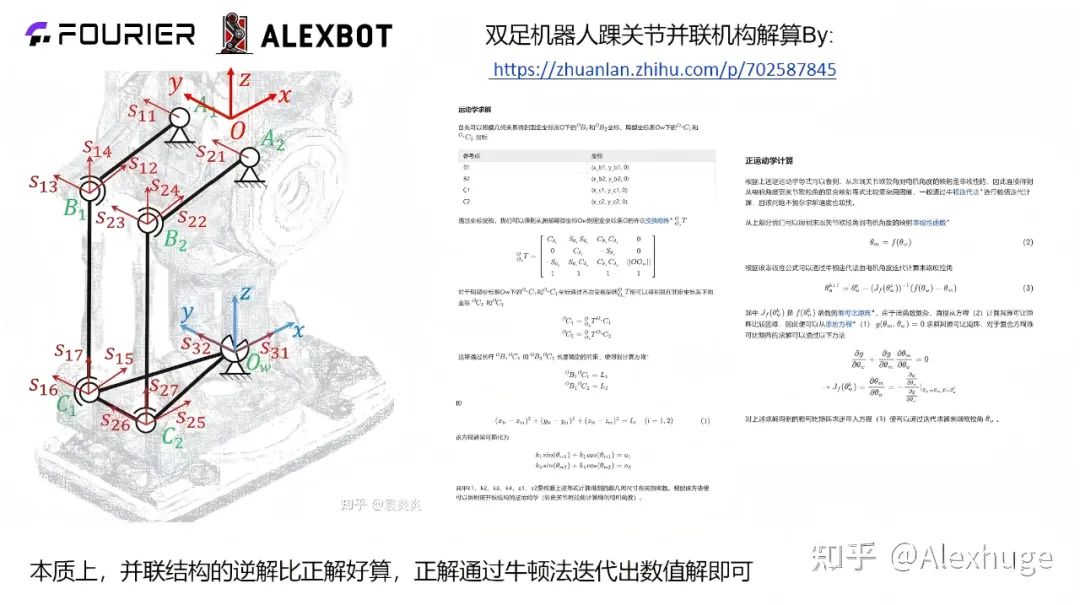
双足踝关节并联设计
在机械结构设计上,AlexBotmini考虑到人体的生物学结构和生物力学知识。正常行走时,髋关节的动作平衡且有节奏,耗能最低。双髋轮流负重,重心左右来回移动约4.0~4.5cm。根据研究,髋关节在步态周期过程中会有两个受力波峰,分别在足后跟着地及趾尖离地时。因此,在电机选型和结构设计上,项目团队对胯部和膝关节部分进行了特别加强,以确保机器人在行走过程中的稳定性和耐久性。
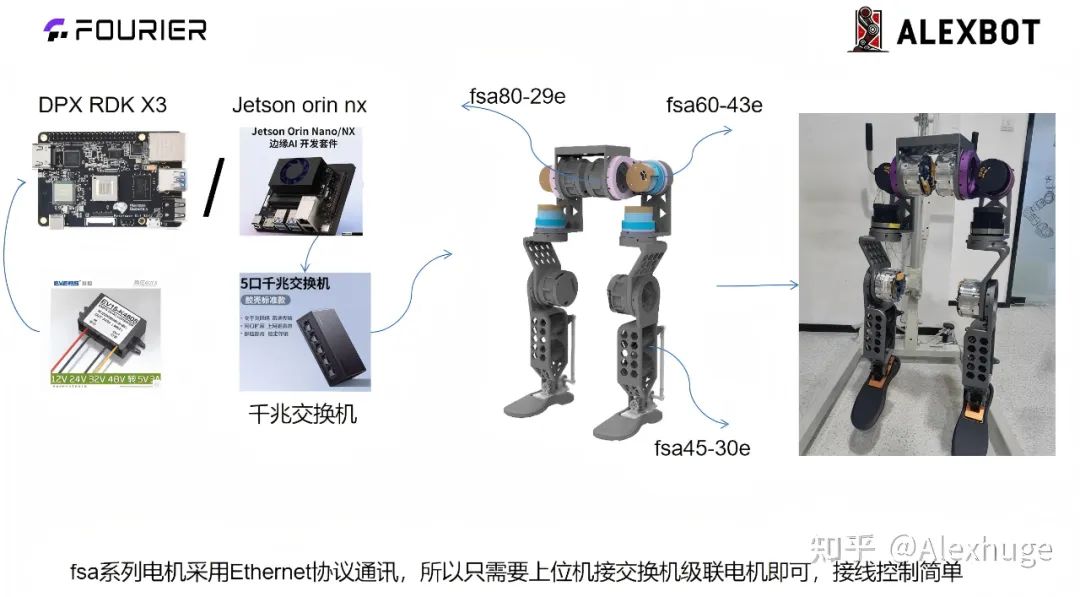
在硬件架构设计方面,AlexBotmini采用了分层设计思路。整体硬件分为信号层和功率层两部分:
信号层:主要包含上位机用于推理神经网络,并通过交换机进行数据交换,以实现一拖多的情况。电机采用固定IP地址,方便上位机进行统一管理和控制。
功率层:实现了硬件隔离,有效防止电机电流过大反冲烧坏上位机。同时,电机采用48V供电,上位机采用20V供电(理论上Orinnx适用19V供电,但实际测试中20V也适用),交换机则采用5-60V宽幅输入。
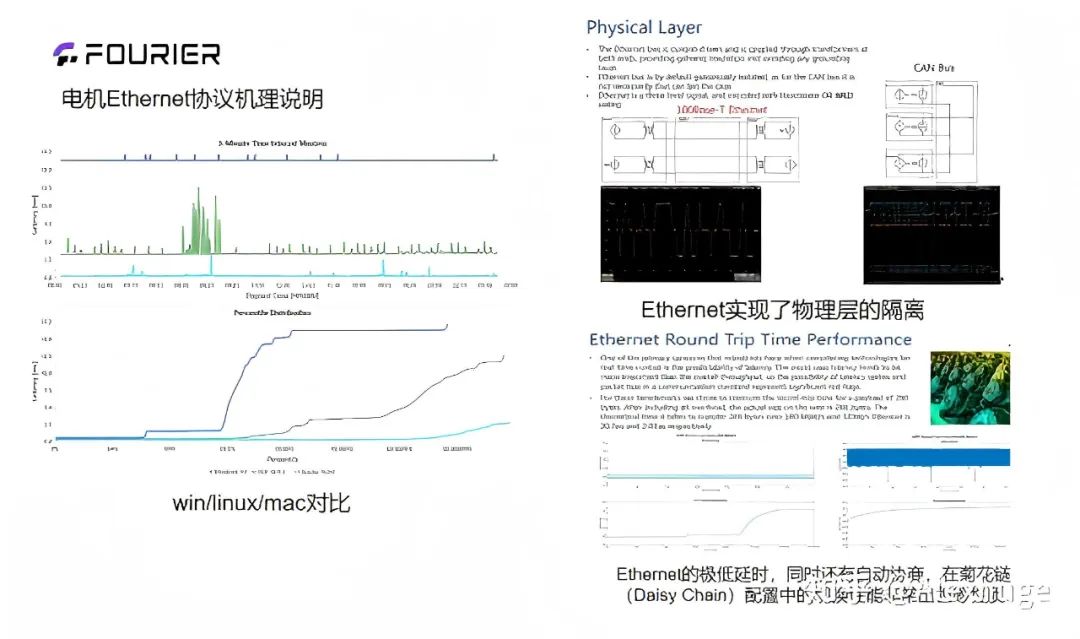
在电机控制方面,AlexBotmini采用了Ethernet协议进行通信。这种协议具有低延时、多电机级联、冗余管理链路等优点,无需下位机即可实现高效稳定的控制。同时,以太网还支持更大的数据负载、多关节机器人的通信拓扑、网络通信编程的简便性、OTA升级以及基于JSON的通信协议等功能,方便机器人的开发和调试。
▍步态设计基于Humanoid-Gym框架开发
Sim-to-Sim迁移
对于模型参数文件(.pt)的迁移,模型的“现实差距”(Reality gap)是一个极为重要的因素。通过在不同仿真软件之间进行迁移,可以起到验证模型并减小这一差距的作用。
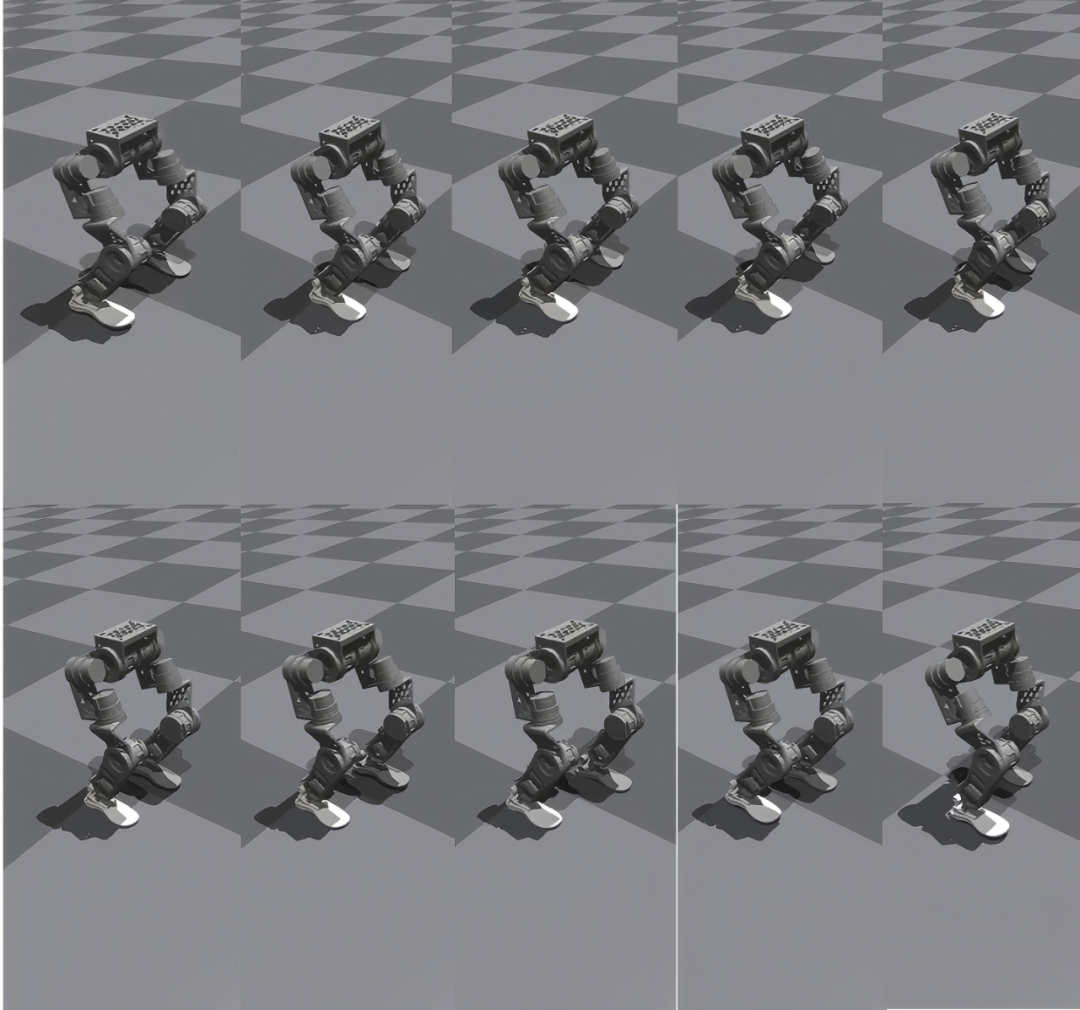
其中,Isaac Gym所使用的PhysX引擎支持并行运算,非常适合用于模型训练。随后,在将模型从Isaac Gym迁移到MuJoCo的过程中,研究团队发现MuJoCo与实际环境的差距相对较小。
▍结语与未来:
截至目前,AlexBotmini硬件层已经调通,上半身设计和制作也已经完成。整机售价尚未公布,但根据项目团队的初步估算,CNC全套成本约为1万元左右,配套硬件成本约为5000元左右。预计将于近期完成项目行走等关键功能的测试和验证工作。
来源:具身智能大讲堂
(文:机器人大讲堂)