跳至内容
中国「野生钢铁侠」稚晖君上周预告的好东西刚刚揭晓——一款跟人一样灵动的机器人新品灵犀 X2。
除了常规的行走、跑、跳,X2 点满了运动天赋,不仅能举重蹲起,还能踩滑板车。
世界线收束,科幻作品成真了。无人驾驶自行车?机器人骑自行车!
这款由智元 X-Lab 最新研发的新品灵犀 X2 有三大特征
据稚晖君介绍,X2 的本体设计融合了大量技术创新思考。
我们将机器人的硬件系统抽象为一系列可复用的核心组件,包括小脑控制器 Xyber-Edge、域控制器 Xyber-DCU、智能电源管理系统 Xyber-8MS,以及经过多次迭代的核心关键模组 Power Flow 等。
借助这些组件,研发团队能够像组装无人机航模一样,快速构建完整可靠的人形机器系统,包括各种形态的人形机器人,甚至是「鸽」了两年的哪吒完全体。(原来你还记得呀)
打破机器人必须硬邦邦的固有印象,X2 选用了极具亲和力的柔性材料。为此,团队尝试了 TPU、ETPU、EVA 等多种材料。
是得,你没有看错,他们甚至考虑了用美妆蛋作为机器人的材料。
此外,团队重新设计了机器人的关节部分。在测试机器人全身 28 个可活动的关节中,没有使用任何平行连接的结构。
这样既能保证重心向上移动(提高稳定性),又能确保每个运动链条互不干扰。
运动控制算法层面,稚晖君表示当前足式机器人的运动控制已经全面从传统的 model based 转向 Learning 驱动的强化学习。
通过结合深度强化学习和模仿学习算法的优势,X2 不仅学会了像人一样走路,还能流畅地跑步和转弯。
而且,X2 还在不断学习和进步。通过数据分析方法,这个智能机器人能够从每秒数万次与环境的互动和动作数据中,找到克服动作限制的方法。
我们相信人形机器人的运动智能问题很快会得到彻底的解决。
智元团队还为 X2 开发了基于 Diffusion 的生成式动作引擎,使得这款机器人不仅四肢协调,思维也颇为敏捷。
借助大语言模型技术,团队为 X2 训练了定制的多模态交互大模型,使其成为首款真正具备复杂交互能力的灵动机器人。
通过边缘侧大脑端到端的模型架构以及大量工程优化,X2 实现了毫秒级的交互反应。
面对「你是谁,你从哪来的,你存在的意义是什么」的哲学三问,灵犀 X2 同样经受了考验。
当 X2 被问及它和狗同时掉水里,应该先救谁,X2 毫不犹豫地回答道先救狗狗,「因为它需要帮助」。
除了具备听觉和语言能力,基于 VLM 的硅光动语多模态模型还能让 X2 通过视觉来理解和认识世界,识别眼前物体不在话下。
作为具备实体的 AI 系统,X2 拥有韵律感、类人的好奇心和注意力机制。
智元团队还正在完善 X2 的思维模型,结合硅光动语大模型,将 reaction agent 作为情感计算引擎,未来会赋予机器人更多情绪表达的能力。
机器人最终会走入我们的日常生活,而智元机器人也一直在为之努力。
稚晖君表示,在过去一年持续探索中,他们研究团队初步找到了泛化作业智能的发展路径。根据这些成果,他们也把操作智能的能力也迁移到了X2上。
首先,在本体层面,灵犀 X2 支持出色的柔性阻抗控制,可装配包括灵巧手在内的各种末端,具备精细操作能力。
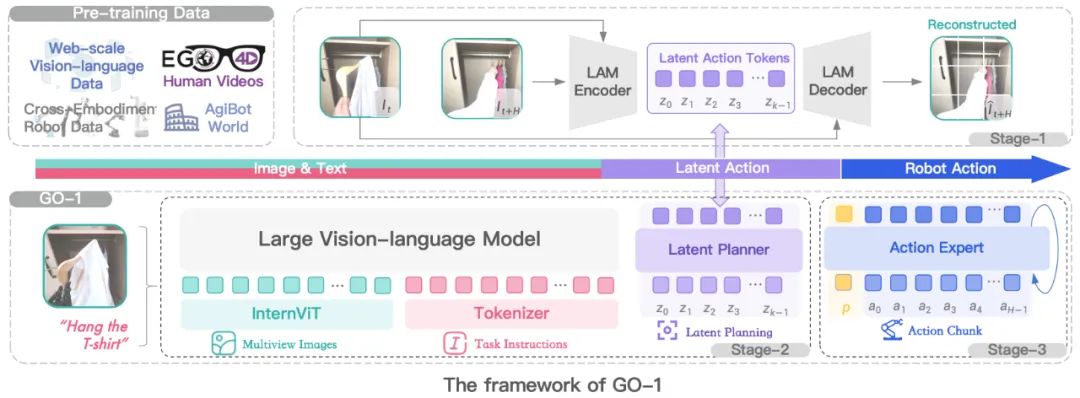
其次,在机器人的具身智能方面,团队也开源了业界最大之一的具身真机和仿真数据集。并提出了 RoboDual 的大小脑系统架构,以及刚刚发布的 ViLLA 架构具身基座大模型「启元」。
这也使得 X2 初步具备简单任务中对操作物体的零样本泛化能力,并在某些任务中实现多机协作。
稚晖君调侃道:「最终我们希望机器人的生产力价值能够外溢到日常生活,让机器人的吉祥三宝成为现实,也就是所谓的保安、保姆和保洁。」
或许在不远的将来,当你推开家门,迎接你的将是一个真诚微笑的 X2。另外,话说全球首个人形机器人半马即将举行,我们会有机会看到智元机器人一展风采吗?

我们正在招募伙伴
✉️ 邮件标题
「姓名+岗位名称」(请随简历附上项目/作品或相关链接)
(文:APPSO)