

“
作者|机器人开放社区
据官方资料显示,帕西尼感知科技(PaXini Tech)成立于 2021 年 6 月,是国内极少数可实现高精度多维触觉传感器自主可控,且拥有完整多维触觉“传感器-灵巧手-人形机器人”产品矩阵的企业。公司创始成员来自世界首个人形机器人诞生地——日本早稻田大学菅野机器人实验室,创新研发出 6D 霍尔阵列式触觉传感器,赋予机器人类人般的触觉感知能力,同时构建起从硬件封装、数据采集、算法集成到首个VTLA 具身智能模型构建的全栈式具身智能技术体系,是该领域全球领先的供应商和技术开拓者。
创始人层面,创始人兼CEO许晋诚,日本早稻田大学工学博士;日本政府START国家级项目研发核心成员(2016~2019);EPSON奖学财团成员,优秀青年博士研究生奖项;与欧姆龙,发那科机器人,EPSON合作研发项目;专业领域:人形机器人、高精度触觉传感器技术开发。联合创始人兼COO聂相如,毕业于美国伊利诺伊大学香槟分校硕士;曾获Y Combinator投资,创立项目曾获头部厂商并购;深圳南山区青年联合委员。
据了解,帕西尼推出自主研发的高精度阵列式多维触觉传感器。该触觉传感器由自研 HAPTA 异构多核阵列软硬件架构实现,集成了阵列式 ITPU 多维触觉传感单元和自研可实时采集解析的触觉算法,可在 1 秒内实现 1000000(一百万)次超高触觉采样,同步捕捉六维力(三维力+三维力矩)、材质、温度、回弹等 15 种触觉感知信息,并以全量程 0.01N 的精细力识别能力,进行远超人类的 1000Hz 进行高频输出,为具身智能体提供业内顶尖的类人般丰富细腻的触觉交互信息。
除此以外,帕西尼通过高可制造性设计、自动化标定和测试技术,填平了触觉传感器从研究到产业化的鸿沟,打破了传统触觉传感器感知维度单一、一致性差、耐久性与可靠性不足、价格昂贵、易用性差等诸多行业内长期发展桎梏,率先实现多维阵列力感知及材质、温度、纹理等多物理属性解析,工业级寿命超 300 万次,并已实现高可靠性规模化量产。
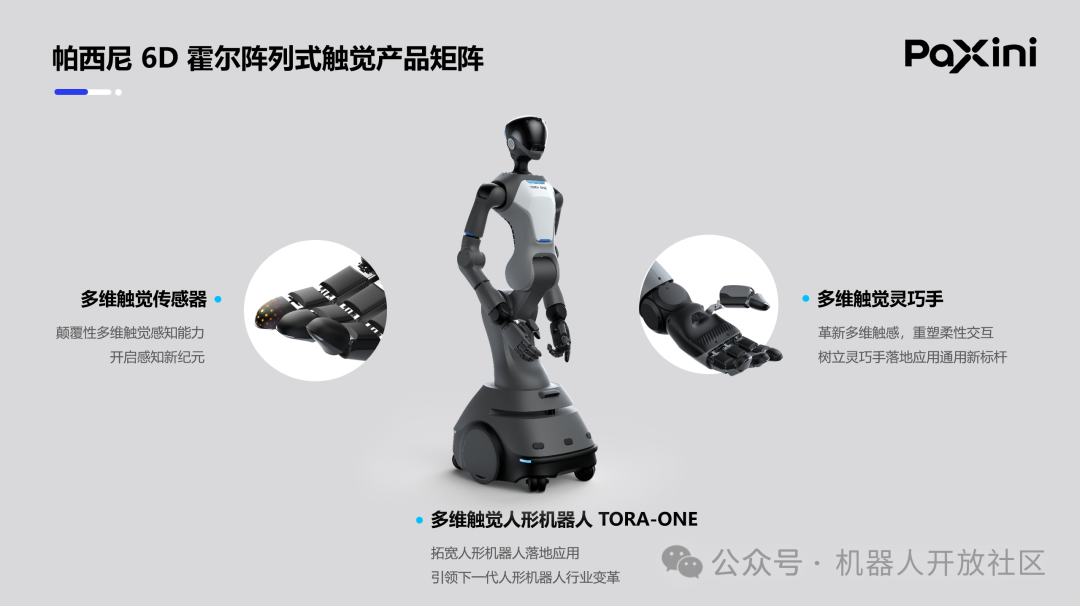
据其官网显示,帕西尼已构建起 6D 霍尔阵列式 “触觉传感器 — 灵巧手 — 人形机器人” 的全栈多维触觉产品矩阵。其中灵巧手 DexH13 是全球首款“多维触觉+ AI 视觉”双模态机器人末端,4 指拥有 16 个高自由度(13主动+3被动),单手集成 1140 个多维触觉传感单元和 800 万像素AI手眼相机,可实现多维力感知和手眼协同的灵巧精细化操作。人形机器人 TORA-ONE 双手搭载超 2000 颗多维触觉传感单元,拥有 53 个全身自由度与 1.46-1.86m 自适应身高调节能力,能够满足安检、物流、商超、康养、精密装配等不同场景下的多种复杂精细化操作需求,展现出强大的泛化能力。
帕西尼的技术将在多领域和比亚迪有潜在合作场景,本次的合作也将充分发挥双方的优势,实现互利共赢:帕西尼有望在未来具身智能的产业竞争中脱颖而出,从应用端触发,实现产品快速迭代,并引领行业发展;而比亚迪则在汽车产业的智能化升级与产业化布局中先发制人,抢占先机。
(文:机器人开放社区)