
凭借独特翅膀结构,鸟类可以在空中自由翱翔。然而,它们的多节腿骨骼特征同样不容忽视,这一特征使得鸟类能够在各种复杂的陆地地形中灵活穿梭,实现不同领域之间的轻松过渡。通过精细的肌肉控制,鸟类能够调整髋关节、膝关节、踝关节以及趾关节的运动,从而适应多种运动模式需求,无论是行走、跳跃还是奔跑,都能游刃有余。

值得注意的是,在屈曲过程中鸟类能够将弹性能量储存于腿部的肌肉肌腱系统中,并在伸展时迅速释放,为起飞提供强大动力。这些机制不仅使鸟类能够进行行走和跳跃等运动以轻松克服地面障碍,还能在短时间内迅速加速至起飞所需速度。
但与此同时,这种强大的腿部力量也带来了飞行时的额外重量负担,因此鸟类在陆地与空中运动模式之间需要进行肌肉质量的权衡,这种权衡因鸟类的生态位和体型大小而异。
▍引解决复杂性与多功能性权衡,提出双足类鸟空中机器人RAVEN
受鸟类这一出色的多模态运动能力启发,科研人员就“如何在空中机器人中实现类似功能,以扩大其在不同环境中的应用范围”进行了深入探索。
固定翼无人机,虽然在高空飞行时表现出色,拥有较高的能量效率和飞行耐力,但在地面机动性方面却显得力不从心,通常需要依赖跑道或发射器进行起飞。为突破这一限制,科研人员受鸟类启发,开始研究具有多功能腿的空中机器人。这些腿不仅能够赋予机器人行走、奔跑和跳跃的能力,还能让机器人像鸟类一样通过跳跃起飞,实现地面与空中之间的主动过渡。这种策略不仅提高了机器人的适应性,还使其能够在各种地形条件下灵活作业,无需依赖跑道或发射器。
然而,在探索不同运动学与推进特性下的多模态运动表现时,如何在确保机器人轻盈的同时,实现如行走、跳跃等多样化步态,仍是当前技术面临的一项挑战。这一挑战核心在于机械设计的复杂性与功能多样性之间的微妙平衡,这也是为何多数现有空中机器人仅支持单一额外运动模式的原因。
针对这一问题,来自洛桑联邦理工学院与加利福尼亚大学的研究团队携手进行了深入研究,并受鸟类的双足结构启发,成功研发出了一款名为RAVEN的机器人飞行器。RAVEN不仅能在多种环境中灵活行动,更具备了行走、跳跃、跨越障碍物以及跳跃起飞的能力,有效打破了空中机器人复杂性与多功能性之间的限制。

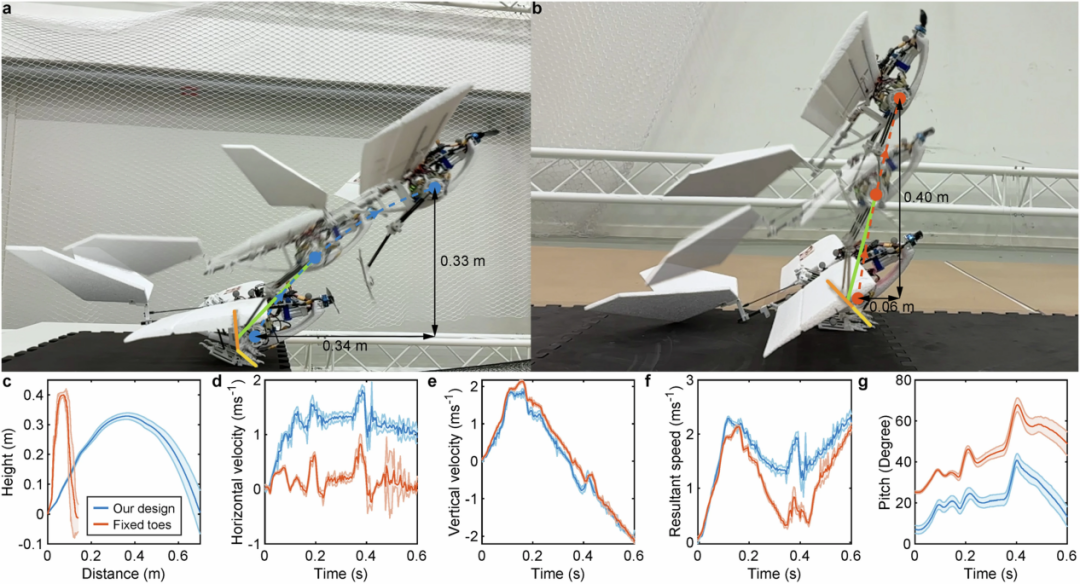
RAVEN的跳跃起飞机制是其一大亮点,该机制深受鸟类启发,采用了模拟鸟类功率放大踝关节的腿部设计。这一设计不仅助力机器人迅速加速至起飞所需速度,还凭借其被动柔顺的脚部设计,确保了起飞时能够精准调整俯仰角度。此外,这些腿部还被赋予了自适应运动步态的能力,能灵活实现行走、跨越间隙还是攀登障碍物等动作。
为了验证RAVEN的设计合理性和实际应用性能,研究团队进行了一系列实验测试。测试结果表明,对于需要从地面转换至空中的飞行系统而言,跳跃起飞对初始飞行速度的提升效果显著,并且在能耗上相较于非跳跃起飞方式更为经济。这一发现有力验证了跳跃起飞在提升飞行机器人性能方面的潜力。
目前,研究成果的相关论文已以“Fast ground-to-air transition with avian-inspired multifunctional legs”为题发表在《Nature》上。

那么,该研究成果具体过程如何呢?接下来和机器人大讲堂一起来进行深入了解~
▍深度借鉴身体构造与跳跃机制,RAVEN机械装置设计与介绍
虽然鸟类的腿部解剖结构高度复杂,包含多节及广泛的自由度,但直接复制这种复杂性会导致机械装置重量增加且控制难度提升。因此,研究团队采取了一种折中方案,设计了一款两节机械腿。

与鸟类的后肢一样,RAVEN的每个机械肢体也由臀部、踝关节和足部组成。其设计主要围绕可控的髋关节和踝关节构建,这两个关节负责腿部的旋转运动,有效扩大了足部在矢状面上的活动范围,这是实现多样化腿部动作的关键要素。
在质量分布上,研究团队借鉴了鸟类后肢的自然构造原则,即肌肉质量主要集中在髋关节附近的大腿区域,以减小转动惯量并降低能耗。为了实现这一点,研究团队将占总腿部质量64.5%的驱动电磁执行器和变速箱安装于髋关节位置,并通过正时皮带与滑轮系统,将踝关节执行器的动力传递至相应部位。


在足部设计方面,考虑到鸟类通过复杂的手指屈肌和伸肌系统以及多关节肌肉的耦合来控制足部及趾关节的运动,研究团队为简化机械与控制结构,设计了一个扁平足和被动弹性趾关节。
趾关节被巧妙地放置于足部与腿部刚性交叉点的后方,这样的布局确保了当无人机的重心在地面的投影位于趾关节与后爪构成的支撑范围内时,无人机能够稳定且被动地站立。

此外,趾关节内置的扭转弹簧能够自动纠正由步态变化引起的偏转,使脚部在保持与地面接触的同时调整方向,这一特性有助于减少滑动,并在地面移动至空中转换过程中调整机体至所需角度。
▍进行跳跃起飞与陆地运动测试,深入评估RAVEN机制构造与性能
为了验证受鸟类启发的腿部设计对飞行加速度的贡献,并深入了解RAVEN的陆地运动能力,研究团队对 RAVEN进行了跳跃起飞测试和陆地运动测试进行性能评估。
-
地空转换测试
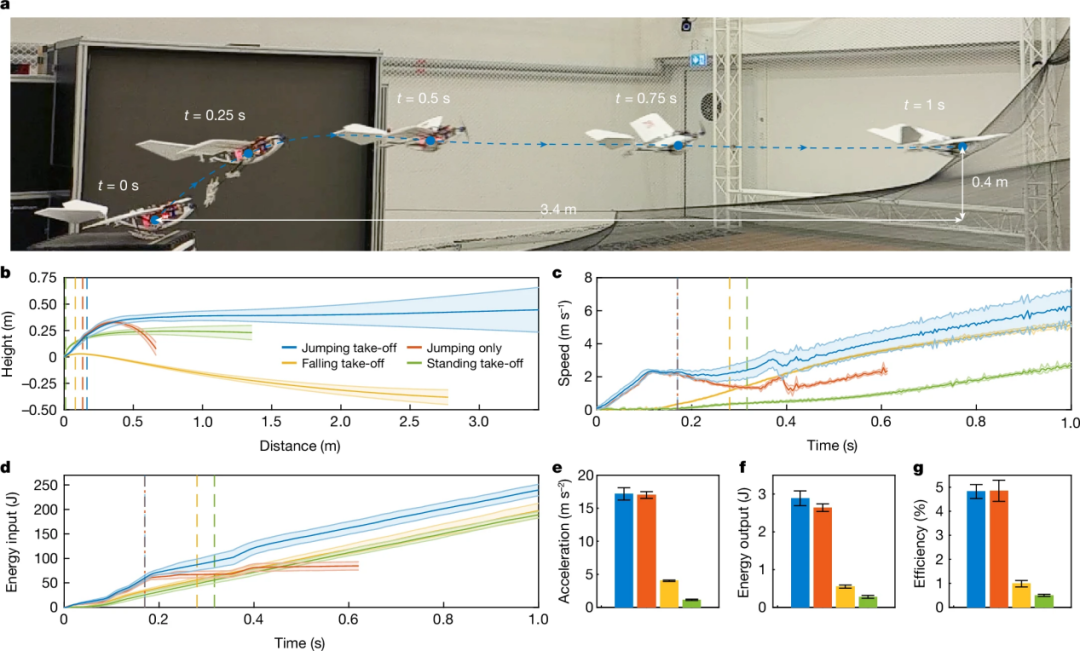
地空转换测试主要聚焦RAVEN腿部运动与起飞速度即脚离开地面的瞬间速度的关联。研究团队通过动力学建模与仿真,模拟了跳跃腿与前螺旋桨的同步触发效果。实验结果显示,通过同步触发跳跃腿和前螺旋桨,RAVEN可以快速自动过渡到飞行模式,并在0.17秒内迅速达到约2.4米每秒(或4.8体长/秒)的起飞速度,这一速度与体重相近的鸟类相当。进一步地,研究团队还进行了无螺旋桨推力辅助的跳跃测试。结果表明,RAVEN仅凭腿部力量即达到了2.2米每秒(4.4体长/秒)的速度,相当于所需起飞速度的91.7%,这一表现同样与鸟类相似。此外,跳跃腿还可为RAVEN提供0.4米(0.8体长)的起飞高度,帮助它越过地面障碍物。

-
陆地运动测试
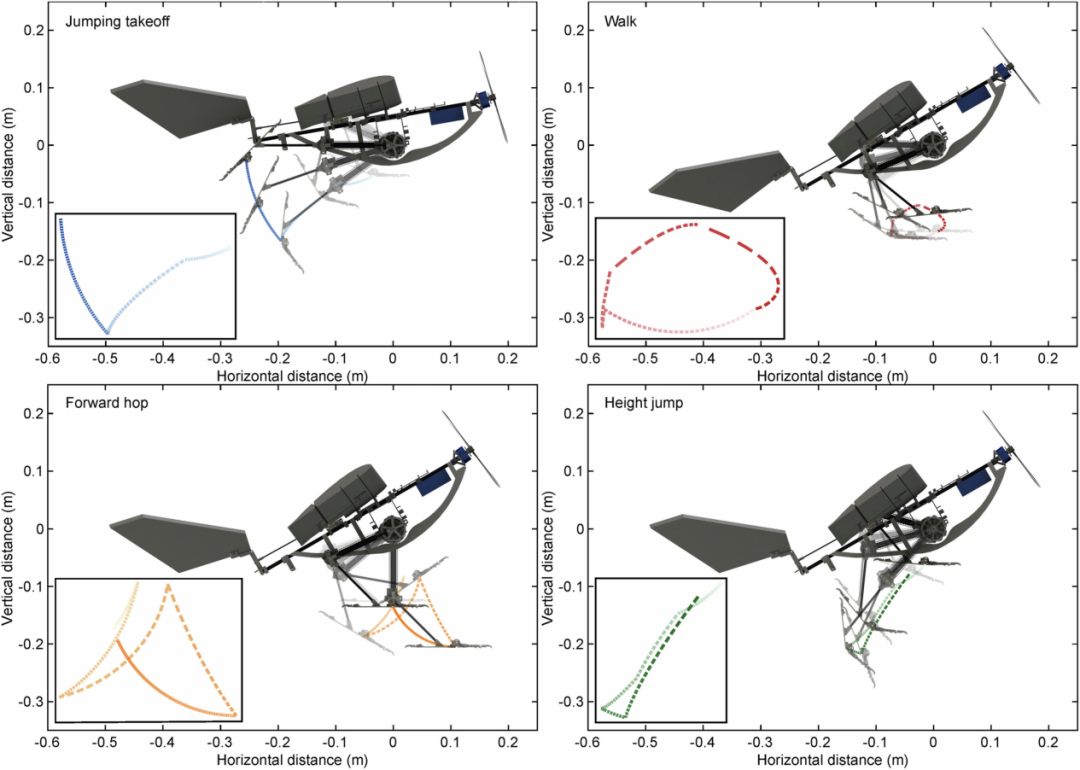
陆地运动测试主要聚焦展现RAVEN多样化运动能力。在该测试中,研究团队设计了步行、跳跃和跳过障碍物三种步态模式,并为每种模式生成了相应的足部轨迹。实验发现,RAVEN在步行模式下能以0.23米每秒(或0.46体长/秒)的速度前进,尽管步态控制为开环,导致机器人在行走几步后可能变得不稳定。然而,通过将尾部置于地面,RAVEN能够有效稳定其步行姿态。

分析发现,多模式机器人(包括RAVEN)在弗劳德数上较低,但COT高于陆地机器人,这反映了增加运动模式可能带来的性能折衷。同时,与体重相似的鸟类相比,RAVEN的弗劳德数虽略低,但其在多模式无人机中表现出了相对较高的弗劳德数和中等的COT。
值得一提的是,RAVEN不仅具备三种陆地运动模式(步行、跳跃和高度跳跃),还能实现地对空的主动过渡,这一能力在众多多模态无人机中显得尤为突出。
参考文章:
https://www.nature.com/articles/s41586-024-08228-9
(文:机器人大讲堂)