近年来,腿足机器人因其能够跨越多种复杂地形及具有仿生学意义而备受业界关注。然而,与动物和人类相比,其在机动性和稳定性方面仍存在一定差距。
为了提升腿足机器人的性能,此前有研究人员在优化腿部结构和运动控制算法等方面进行了诸多尝试。这些努力虽然取得了一定成效,但机器人仍依赖于支撑腿来平衡摆动腿所产生的角动量,来维持运动过程中的稳定性。随着机器人机动性的不断提升,腿部摆动频率的增加、步长的增大以及支撑腿支撑时间的减少,都对机器人的稳定性和整体性能构成了新的限制。如何更有效地调节这些因素,以进一步提高腿足机器人的性能,成为该领域面临的一大挑战。
▍创新设计KOU-III,利用四旋翼辅助显著提升性能
有研究人员从仿生学角度寻求突破,并受人类和动物在高速运动时采用辅助机制增强性能的启发,探索为腿足机器人添加辅助机制的可能性。在这一方向上,有的研究团队通过模仿猎豹尾巴设计质量块来辅助机器人行走,有的则尝试利用气动辅助,如安装可折叠固定翼或旋翼等。
此前,来自山东大学控制科学与工程学院的一研究团队曾针对如何通过旋翼辅助实现高机动性双足机器人的问题,提出了一种单腿平面机器人方案。然而,该方案存在局限性,即机器人无法在受限平面外独立行走。为了克服这一缺陷,前不久该团队在前期工作的基础上进行了深入改进,并成功提出了一种带有四旋翼辅助行走功能的双足机器人——KOU-III,实现了机器人在三维空间中的独立运动。
在KOU-III机器人的原型设计中,研究团队针对原膝关节模块执行器采用的悬臂式输出机构和小平面键连接耦合装置进行了改进。由于膝关节在运动过程中承受较大载荷,原结构在长期使用后传动间隙会显著增加,导致精度下降。为此,团队将悬臂式结构改为桥式设计,有效提高了结构的刚性和紧凑性。同时,团队还开发了一套简洁的运动控制策略,使机器人能够执行站立、行走和跳跃等多种动作。
为了验证KOU-III机器人的实际性能,研究团队开展了一系列实验测试。测试结果表明,四旋翼辅助显著提升了双足机器人的稳定性和运动性能。这一研究成果为使用辅助机制增强腿足机器人性能的研究领域提供了新的思路和方向。
在原型设计方面,KOU-III双足机器人的研发主要聚焦于集成膝关节设计、躯干设计以及电气系统设计三大核心方面,具体如下:
KOU-III采用了基于摆线齿轮减速器的集成膝关节设计,如下图所示,该设计选用T-motor MN4006电机作为执行器的动力源,将摆线齿轮减速器置于机器人大腿内部,有效减小了腿部整体尺寸,并降低了碰撞和摩擦的风险。此设计的显著优势在于,它将两个输出机构巧妙地组合成一个桥接连接,确保了力分布的更加均匀,同时在受到冲击时能够最小化变形。此外,该输出机构摒弃了平面键连接的使用,从而降低了因键松动而导致的传动间隙风险。尽管将执行器与机器人大腿集成增加了更换的难度,但它显著提升了机械结构的稳定性。图3展示了两种关节执行器输出机构的静态应力分析结果,其中对固定输出连接孔施加6.6Nm的扭矩进行应力模拟。数据显示,模块化关节执行器的最大应力为1.577×101。同时,集成膝关节执行器中的针轴承应力分布更为均匀,进一步证明了其机械稳定性的优势。
在机器人躯干的设计上,研发团队综合考虑了多个关键因素:一是最小化机器人的负载;二是防止旋翼触地,同时最大化躯干的运动范围;三是最大化旋翼产生的扭矩;四是确保机器人的外观美观。
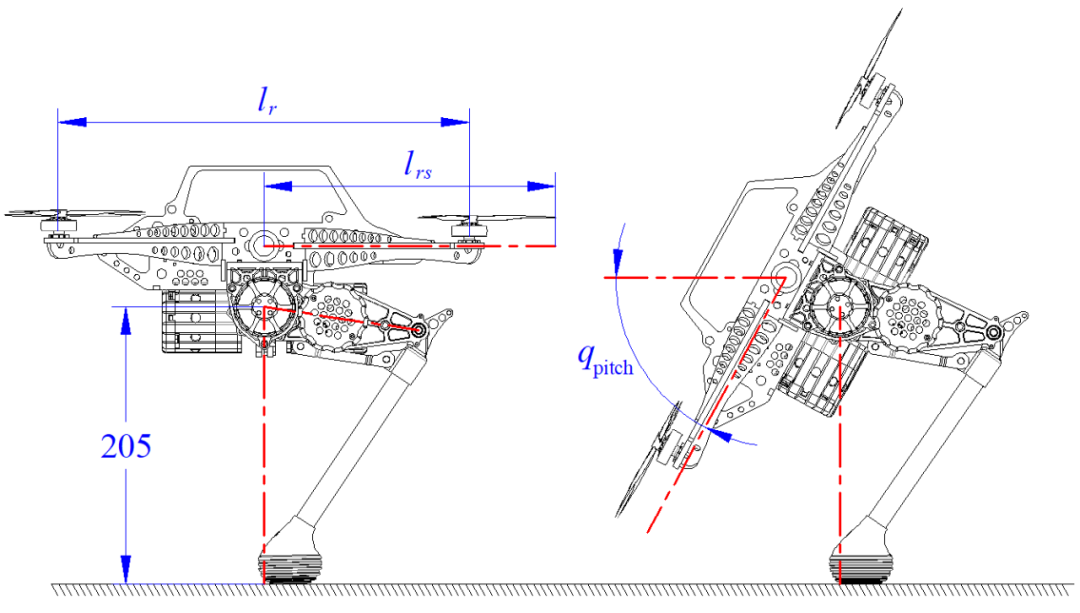
为了减轻机器人负载,躯干采用了低密度高强度的碳纤维板材料。旋翼臂连接到躯干上,旋翼臂的长度直接影响到旋翼对躯干的扭矩大小。然而,随着旋翼臂长度的增加,旋翼尖端在躯干倾斜时更容易触地。经过综合考量,研发团队将旋翼臂长度设置为稍短的151mm,既确保了机器人俯仰角有足够的运动范围以及较大的旋翼扭矩,又保持了机器人的美观性。机器人的俯仰角运动范围达到了±160°。将上图中的单腿机构安装到机器人躯干上,并添加一个滚动关节执行器,至此,旋翼辅助双足机器人KOU-III的设计得以完成。
KOU-III的电气控制系统设计如下图所示。与前代产品KOU不同,KOU-III实现了独立运行,无需基站支持,因此添加了独立电源系统。考虑到执行器的最大工作电压为24V,研发团队直接使用24V电源为关节执行器和旋翼的电子速度控制器(ESC)供电。对于控制器和信号适配板(需5V电源),则采用了MORNSUN的隔离电源模块(型号URB4805LD-30WR3)。该模块输入电压范围18-72V,输出电压5V,最大电流6A,完全满足了系统的电源需求。基于该电源单元的电压调节模块也如下图所示。在信号传输方面,KOU-III与KOU的电气系统保持一致,包括传输方法、速率和方向等。
在旋翼的辅助下,双足机器人有望实现更为出色的动态性能。在控制方法方面,研究团队采用了一种简洁直接的控制策略,以验证机器人的潜力,并展示旋翼辅助在提升机器人敏捷性和机动性方面的显著效果。
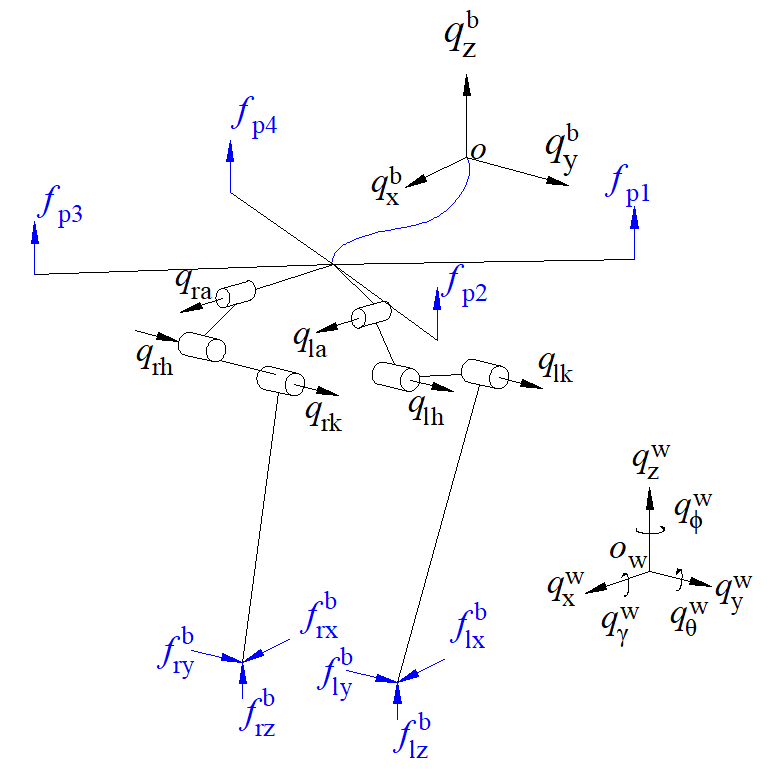
研究中,团队定义了世界坐标系(w)和机体坐标系(b)。机器人的左右腿在接触点处受外部力F_b_l和F_b_r作用。脚端接触力与关节扭矩关系可通过雅可比矩阵推导,执行器输入由脚端接触力表示。同时,通过正向运动学计算,可获得左右脚的脚端坐标P_b_l和P_b_r。机体坐标系相对于世界坐标系方向的旋转矩阵R_w_b,则由IMU传感器直接测量得到。为了统一表示,脚端力和坐标均转换至以机器人中心为原点的世界坐标系中。
基于旋翼配置,旋翼对机器人躯干的调整力和扭矩u_b_p可计算获得,其中u_b_pfz为总推力,u_b_ptx和u_b_pty为沿机体坐标系x轴和y轴的力矩。与脚端接触力相比,旋翼产生的反扭矩可忽略不计,因此在机器人躯干的影响分析中未予考虑。为了调节旋翼的贡献,u_b_pfz被设置为常数k_p乘以旋翼产生的最大推力f_p_max,其中k_p用于调整旋翼的贡献程度。推力u_b_pfz通过R_w_b转换到世界坐标系中,得到相应的推力向量。旋翼引起的偏航控制力矩被忽略,力矩转换到世界坐标系中得到相应的扭矩向量。机器人的输入向量也进行了重新定义。
此外,团队将机器人躯干的自由度作为控制目标,并将连杆简化为无质量连杆,从而推导出机器人的动力学方程。
在控制策略制定方面,由于控制目标是调节机器人躯干的六个自由度,研究团队设计了比例-微分(PD)控制器,根据期望的躯干自由度和实际反馈的躯干自由度进行控制。控制输出从PD控制器分配到脚端力和旋翼扭矩,并考虑了支撑腿的数量和机器人的重力等因素。脚在x和y方向上的接触力用于控制机器人的姿态,而旋翼的扭矩则用于伺服机器人的前后和左右位移,这种方法有效地将旋翼力的延迟转化为机器人水平位移的精确控制。
为保持姿态稳定性,研究团队还采用了快速响应的脚接触力控制机器人姿态。团队通过将模型纳入控制输入和分配矩阵,形成空间系统方程,并通过分析传递矩阵的特征值,验证了控制策略的收敛性。在获得脚端力和旋翼扭矩后,研究团队使用旋转矩阵将它们转换到机体坐标系中。最后,每个力和扭矩分别通过其各自的雅可比矩阵转换为关节扭矩和旋翼升力,并直接应用于执行器。
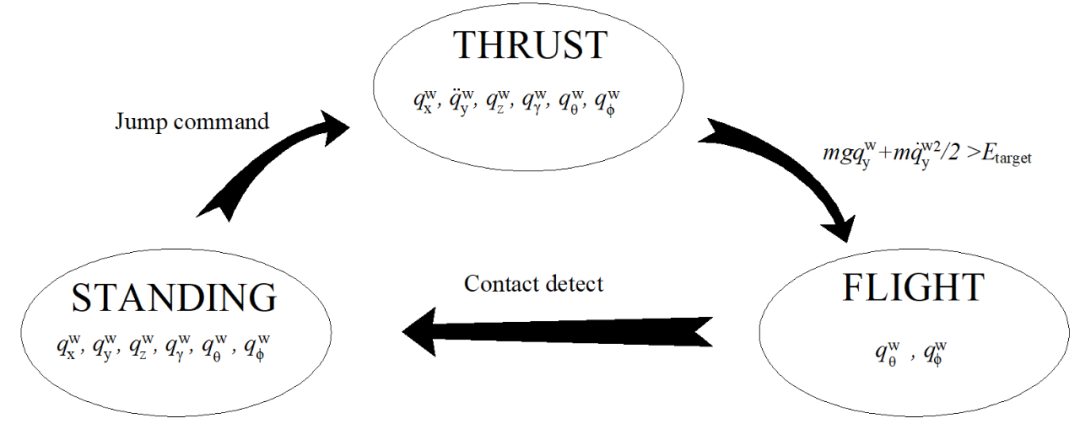
在站立控制时,机器人根据支撑腿数量计算脚接触力和旋翼扭矩;在行走控制时,研究团队设定双脚不同时接触地面,并通过保留支撑腿控制扭矩和设定摆动腿脚坐标为零来获取控制策略,同时利用摆动腿脚放置位置控制偏航角,并采用五次Bézier曲线减少摆动腿冲击;在跳跃控制时,机器人则通过状态机和切换过程实现跳跃运动,包括推力、飞行和站立三个状态,根据不同状态设定相应的控制目标。
为了进一步验证KOU-III的稳定性和机动性,研究团队就KOU-III的站立、行走和跳跃三种运动状态进行了深入实验。
在站立实验中,研究人员发现,具有点接触脚的双足机器人通常难以保持静态站立,但在四旋翼的辅助下,这一难题得到了轻松解决。机器人不仅实现了稳定站立,还表现出了出色的抗干扰能力。在实验中,研究人员对机器人施加了多次干扰,机器人均能在短时间内迅速恢复稳定,这证实了其出色的稳定性。
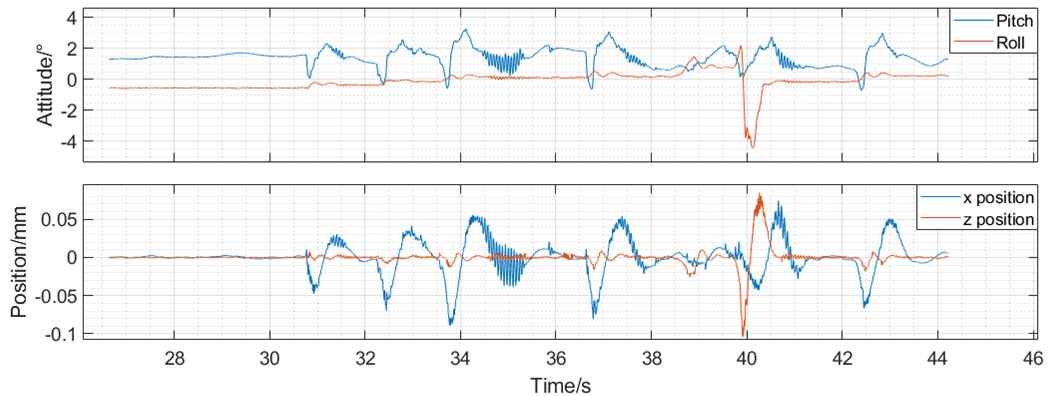
行走实验则进一步验证了四旋翼辅助对机器人稳定性的提升作用。在有四旋翼辅助的情况下,机器人在原地踏步时的姿态和速度数据均表现出较小的波动,与无辅助时相比有显著改善。此外,四旋翼辅助还显著提高了机器人的最大行走速度,使其在没有摔倒的情况下达到了更快的行走速度。
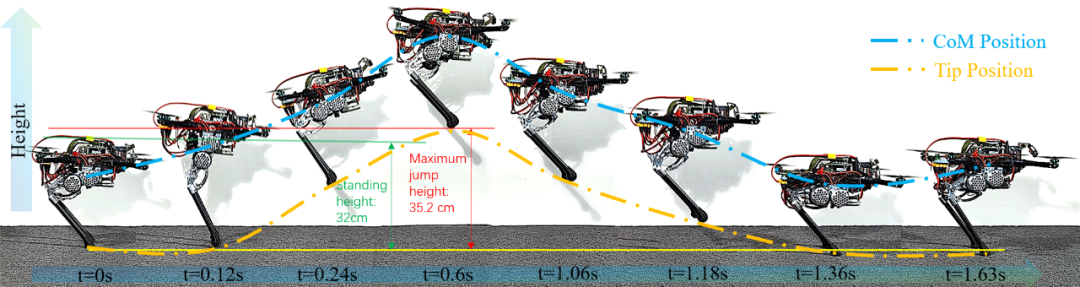
在跳跃实验中,研究人员重点测试了机器人的跳跃能力和遍历性。实验结果显示,有四旋翼辅助的机器人能够轻松跳跃到较高台阶上,并在落地后保持稳定站立。同时,通过调整四旋翼的推力,机器人还实现了超过自身高度的跳跃,进一步展示了其出色的机动性。
值得一提的是,该研究团队在实验中充分考虑了四旋翼的功率限制和能量消耗问题,仅利用四旋翼辅助机器人的运动,而非完全依赖其推力操作机器人。这一做法不仅降低了实验成本,还提高了实验的实用性和可行性。
通过以上一系列实验,研究团队验证了四旋翼辅助双足机器人在站立、行走和跳跃方面的稳定性和机动性,为双足机器人的进一步发展提供了有力支持。未来,随着相关技术的不断进步和完善,相信四旋翼辅助双足机器人将在更多领域发挥重要作用。
https://papers.ssrn.com/sol3/papers.cfm?abstract_id=5056354
(文:机器人大讲堂)





这不就是刚横空出世?四旋翼辅助双足机器人KOU-III,终于在三维空间里自由穿梭了!