
想必大家都背过很重的背包。不管是上学、徒步还是旅行,背重物总是让人苦不堪言,长期使用还会对关节和肌肉造成损伤。
这主要是由于行走时背包的晃动给人体施加了额外的冲击负荷。
东南亚挑夫们用低刚度竹竿挑担的方式,启发了科学家开发悬浮背包技术。不过现有的悬浮背包有个难题:人走路快慢不一,背包重量也会变,系统无法适用所有情况。
虽然也有主动式方案的背包,但那需要随身带电池,又重又不方便。
现在,哈工大朱延河教授团队带来了一个激动人心的消息:他们研发出了一款无需外部供能的智能悬浮背包!
顾名思义,这个背包能够实现悬浮,不但有望解决人体不能承受之“重”,而且还不用外部充电。

先来看看这个背包的原型机:

网友表示:
· 我的背包客梦有救了?
· 哈工大出品,必属精品!这波稳了
· 啥时候能买到,已经等不及了!
事实上,这是一种配备低功率可调阻尼装置的准零刚度悬浮背包,可以动态调节负载的运动状态以平衡不同重量的负载,并适应不同的行走速度。
下面给大家详细讲讲这个背包的核心技术和目前测试情况。
▍硬核拆解:智能背包如何实现“悬浮”?
这个黑科技背包的核心秘密藏在两大系统中:可调恒力机构和可调阻尼装置,如图1所示。来看看它们是如何配合工作的。
 图1 变阻尼准恒力悬浮背包样机
图1 变阻尼准恒力悬浮背包样机
首先是可调恒力机构的巧妙设计:运用了重力平衡原理。通过两组弹簧和摆动杆的设计,让悬架刚度降低到接近为零。只要调节弹簧的悬挂位置,就能平衡不同重量的负载,将背包的加速度降到最低,如图1(a)所示。
再说可调阻尼装置,这套系统利用了电机的发电模式,完全不需要额外供电。
当使用者背着包走路时,因为人体的背部在负重后无法保证完全垂直,负载会产生偏置力。装置中的微控制器通过控制MOS管的通断状态,调节电机的阻尼大小。这就像是给背包装了个“智能刹车系统”,防止负载撞击到滑轨限位,如图1(c)和(d)所示。
系统的工作细节体现在多个方面:负载连接板固定在皮带上,电机通过皮带传动改变负载运动,结构如图2(a)所示。同时,通过PWM调制占空比实现连续调节阻尼。
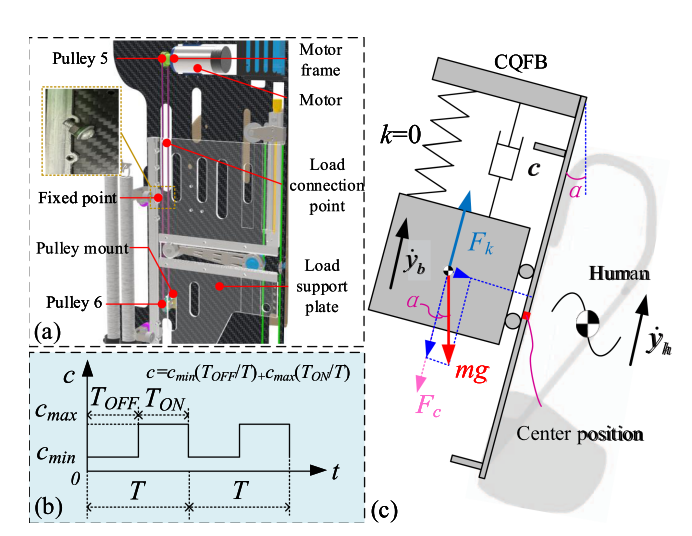 图2 可调阻尼装置
图2 可调阻尼装置
系统还设计了智能保护机制:在高制动功率状态下,通过降低PWM占空比来降低电机的制动功率,确保系统安全运行,如图2(b)所示。
为了确保负载不会因偏置力而产生额外的加速度,并保持负载在中心位置附近移动,需要提供适当的阻尼力Fc来平衡偏置力,如图2(c)所示。
研究团队还提出了一种基于负载相对位置和相对速度的变阻尼控制策略。简单来说,就是当使用者背着包走路时,系统能够实时判断负载的位置和运动趋势,自动调整阻尼力,让背包始终保持在最佳位置。

具体来说: 当负载偏离中位向上时,若相对速度也为上,则电机产生阻尼力阻碍负载运动,当负载相对速度向下时,无阻尼,在人行走的周期运动后,负载将回复到中位附近。当负载偏离中位向下时,控制方式与之类似。
为了进一步提升性能,团队还引入强化学习算法来优化阻尼力输出,减少阻尼力对使用者的影响。
测试结果如图3所示。图3(a)表示变阻尼和固定阻尼下的负载位移。(b)表示变阻尼和固定阻尼下的负载惯性力。变阻尼的负载位移幅度最小,不仅能快速返回初始位置,而且比固定阻尼系数为3的峰值加速垂直力小34%。
 图3 变阻尼和固定阻尼情况下的测试结果
图3 变阻尼和固定阻尼情况下的测试结果
▍数据实测:这个背包到底有多强?
实验室里的理论再完美,也要经过真实场景的考验。为了评估该背包的减负性能,研究团队进行了负重行走实验,如图4所示。分别记录了测试者的能量消耗和负载的位移变化。
 图4 人体实验过程
图4 人体实验过程
实验结果如图5所示。在无阻尼状态下,负载将缓慢向下移动,达到极限,迅速反弹,并在重复的循环中继续向下移动。然而,使用可调阻尼装置,负载不会达到极限。
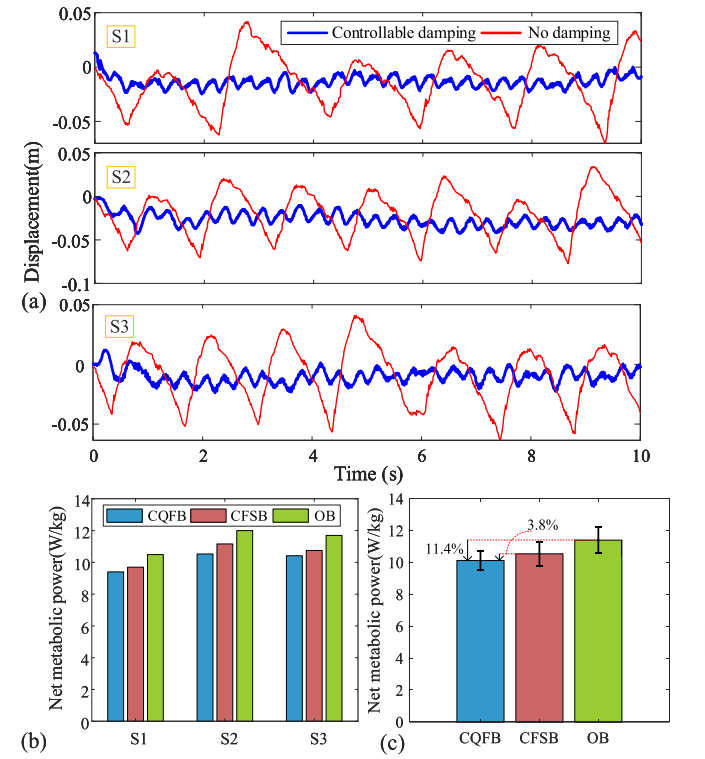 图5 人体实验结果
图5 人体实验结果
这表明可调阻尼装置有效地解决了负载与恒力机构之间的不匹配问题,提高了负载运动的稳定性。
那么,变阻尼悬浮背包可以比普通背包省力多少?
数据显示,变阻尼准恒力悬浮背包(CQFB)将普通背包(OB)的代谢率从11.4±0.8 W/kg降低到10.1±0.6
W/kg!与普通背包(OB)相比降低了11.4%,与恒力悬浮背包(CFSB)相比降低了3.8%。
同时,负载与滑轨限位的持续碰撞可能会损坏背包。测试者更喜欢变阻尼准恒力悬浮背包(CQFB)。原因很简单——没人喜欢背着一个老是撞来撞去的背包走路。这也突显了可调节阻尼装置的重要性。

更厉害的是,这个系统还能根据走路速度自动调节。测试显示,走得越快,系统的减震效果反而越明显!
研究测试了一名测试者在三种速度下的负载惯性力:
测试结果如图6所示,CQFB在三个速度下都能有效降低负载加速度,惯性力的减少程度随着运动速度的增加而增加。当负载接近滑轨中间位置附近,可调阻尼装置对负载的加速力影响较小。
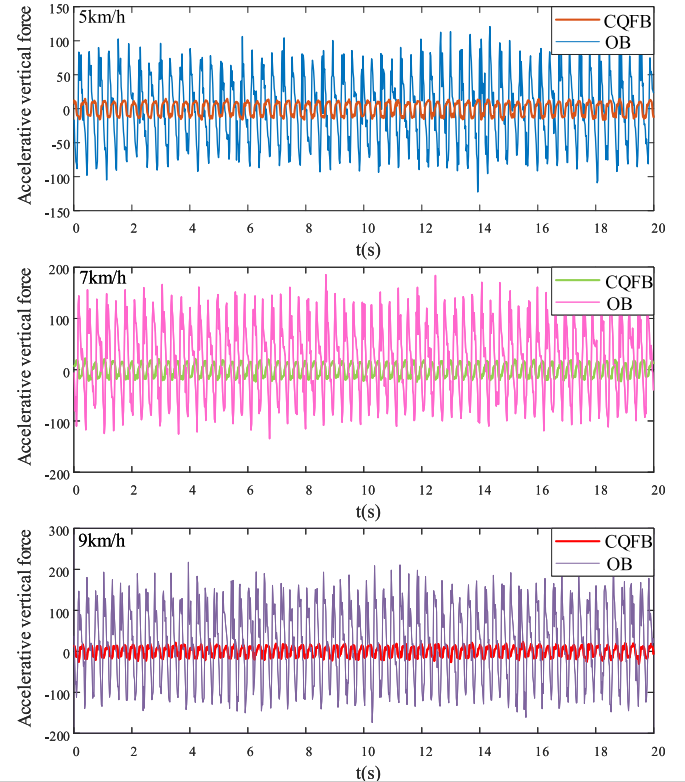 图6不同行走速度下两种背包的负载惯性力
图6不同行走速度下两种背包的负载惯性力
最让人惊喜的是垂直加速度的降低。在快步走的情况下,比普通背包的上下晃动减少了整整85%。这意味着什么?就是背包基本不会剧烈晃动,大大减轻了对身体的冲击。
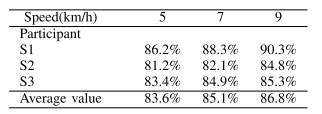 表1 峰值加速度垂直力的百分比减少
表1 峰值加速度垂直力的百分比减少
此外,当使用者弯腰时,该系统会动态调整负载的运动,以防止其与滑轨末端发生碰撞。
▍未来更多可能:背包还要变得更强!
研究团队的脑洞可不止于此。他们已经在规划下一步的升级:让这个背包变得更聪明,能够适应更广泛的运动模式,例如跳跃。
更有意思的是,团队还打算给背包加入能量回收功能。通过电机发电模式,把运动产生的能量回收利用,用来调节背包的运动状态。
想象一下,这项技术未来可能被运用到更多场景: 户外运动、物流运输、军事装备…潜力无限。
从实验室里的原型机,到可能改变未来出行方式的智能装备,这个不用充电的智能悬浮背包正在一步步驶入现实赛道。
看来,在哈工大科研团队的努力下,“背包革命”已经悄然打响(doge)

论文链接:https://ieeexplore.ieee.org/document/10753097
(文:机器人大讲堂)