
随着大型语言模型(LLM)的飞速发展,单个LLM和智能体(Agent)的局限性愈发明显。就像一个人再厉害,也干不过一个配合默契的团队。受到人类团队分工协作的启发,将多个LLM驱动的智能体组合成一个团队,不仅能发挥各自的优势,还能高效解决复杂问题。然而,多智能体系统在推理时也面临着诸多挑战:模型选择困难、协作模式设计复杂、性能与成本难以平衡……别担心!多智能体领域的的“超级调度员”MasRouter来了!由IDEA联合同济大学、武汉大学、南洋理工大学团队提出的MasRouter,首次将协作模式选择、角色分配和LLM调度整合成一个智能路由框架,为每个任务量身定制最佳智能体团队!

背景介绍
考虑这样的两个编程问题:
-
• 编写python代码统计字符串的长度 -
• 从后端数据库到前端网页全面实现一个视频网站
前者简单到令人发指,随便一个小型LLM就能搞定,用大模型简直是“杀鸡用牛刀”;后者复杂到令人抓狂,需要最先进的模型和复杂的多智能体分工协作,才能完成从后端数据库到前端网页的全面开发。现实生活中,这样的任务比比皆是,而LLM和推理方法更是多如牛毛。如何选择合适的LLM、协作模式,以平衡效果和开销,成了一个让人头疼的问题。
在单智能体领域,LLM路由方案已经发展得相当成熟,能够根据不同问题动态选择LLM。然而,当面对复杂的多智能体任务时,这些方法就显得力不从心了。因为它们无法解决多智能体系统中的三个关键问题:(1)如何选择协作模式?(2)如何为智能体分配角色?(3)如何为每个智能体分配合适的LLM?为了解决这些挑战,本文首次明确定义了多智能体系统路由(MASR)任务,并提出了第一个多智能体系统路由框架——MasRouter。
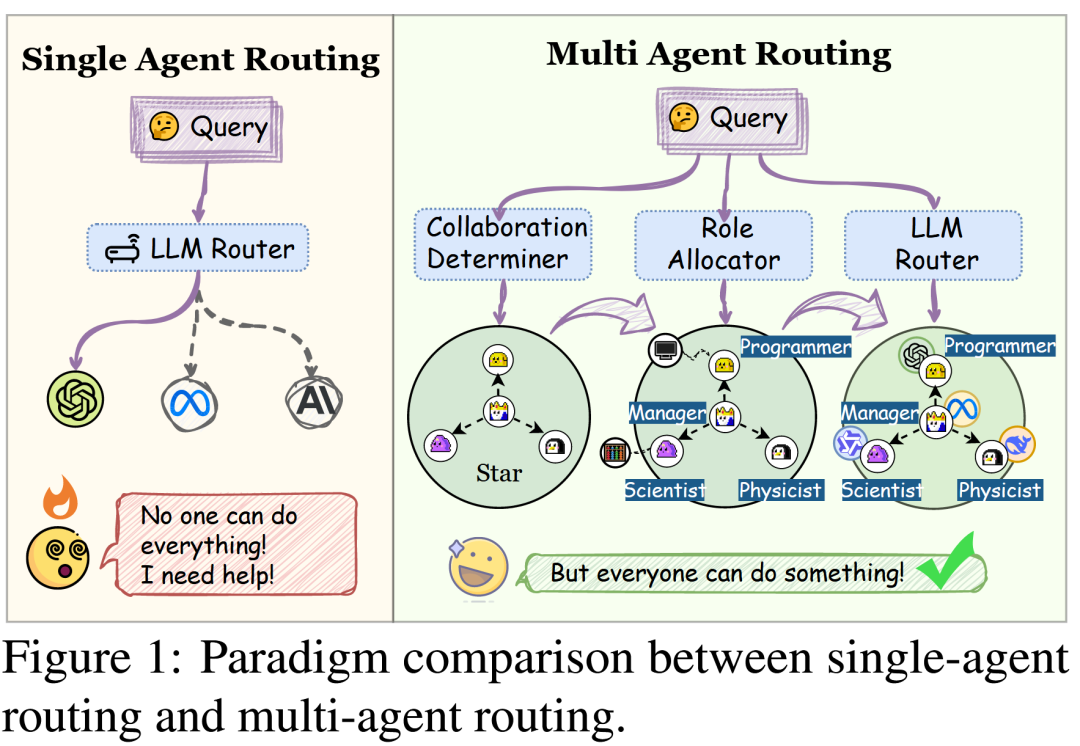
多智能体系统路由(MASR)
MASR的核心目标是为每个查询定制最佳的多智能体系统。它就像一个智能的“调度员”,根据任务的复杂性和领域,动态选择最适合的协作模式、角色分工和LLM。协作模式是整个系统的“骨架”,决定了多智能体推理的基本流程;角色分工是“肌肉”,明确了每个智能体的具体任务;而LLM调度则是“血液”,为每个智能体提供动力。理想的MASR方法能够根据任务需求,精准地选择最适合的组合,既不会“大材小用”,也不会“小材大用”。
MasRouter框架详解
提出多智能体系统路由(MASR)任务后,我们设计了第一个MASR框架——MasRouter,该框架实现了协作模式选择、角色分配和LLM调度的一体化。MasRouter的核心是一个三阶段的多智能体系统路由器,包括协作模式决断器、角色分配器 和LLM调度器,通过三个模块能得到生成某问题正确答案的概率:


方法的整体流程如下图所示:
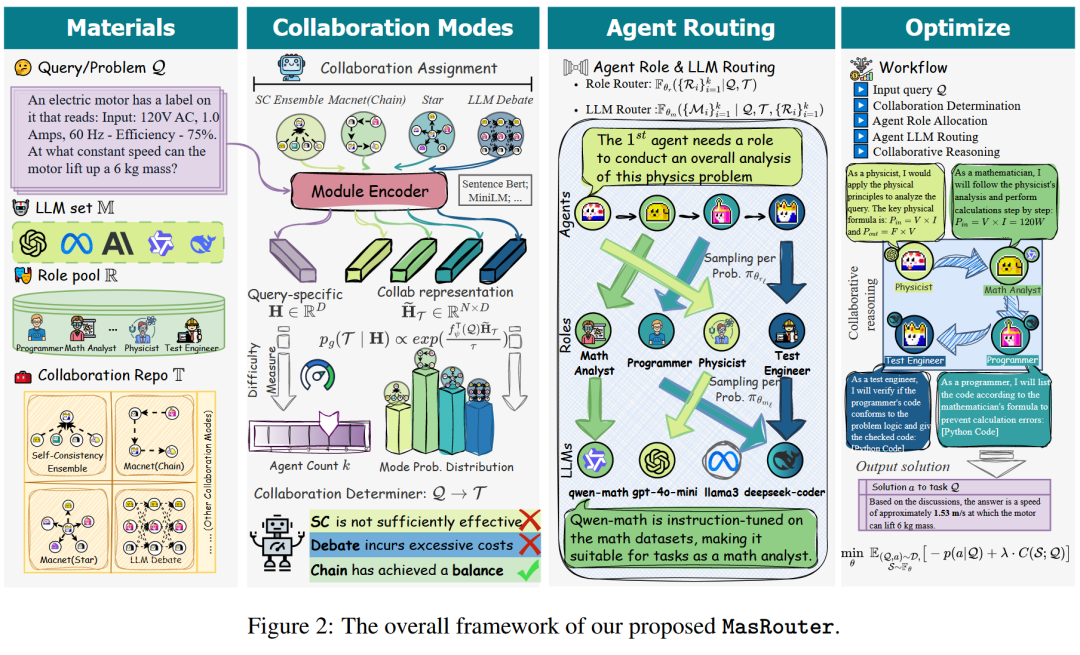
协作模式选择
MasRouter的第一个任务是选择最适合的协作模式。这就像是为多智能体团队搭建一个“骨架”,决定了团队的基本运作方式。例如,对于一个复杂的软件开发任务,可能需要一个包含需求分析、算法设计、代码开发和测试的层次化工作流;而对于一个复杂的数学问题,可能需要多轮检查和反思的工作流。
MasRouter使用了一个变分潜在变量模型来捕捉查询与协作模式之间的语义关联,从而选择最合适的协作模式:
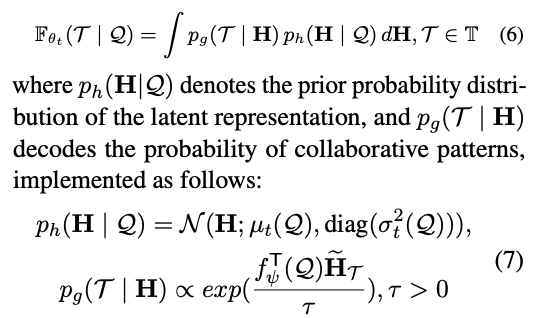
角色分配
协作模式确定后,MasRouter开始为每个智能体分配角色。这就像是为多智能体团队填充“肌肉”,明确了每个成员的具体任务。角色分配需要考虑任务的顺序和依赖关系。例如,程序员必须先编写代码,测试工程师才能进行验证和调试。
MasRouter通过结构化的概率级联模型来形式化角色生成过程:

其中, 表示生成第 ℓ-th 个角色的概率,该概率基于查询 Q、选定的 T以及先前的 ℓ-th 个角色配置文件。我们通过以下方式迭代计算:
表示生成第 ℓ-th 个角色的概率,该概率基于查询 Q、选定的 T以及先前的 ℓ-th 个角色配置文件。我们通过以下方式迭代计算:

大语言模型调度
每个LLM都有自己的优势和局限性,而LLM调度的目标就是“物尽其用”。这就像是为团队注入“血液”,让每个成员都能发挥出最强的能力。例如,对于数学问题,选择擅长数学的LLM会事半功倍。
MasRouter根据任务的领域、难度以及智能体的角色,动态选择最适合的LLM。具体来说,它将多个智能体的LLM选择过程视为一个多项式分布问题:


优化目标
MasRouter通过最大化生成正确解决方案的概率并最小化成本消耗来平衡有效性和效率。然后,按照多代理结构设计中的标准方法,应用策略梯度来逼近和优化该目标。
如此一来,MasRouter就构建了一个综合协作模式选择、角色分配和LLM调度的多智能体路由方法。不同的LLM、协作模式和角色分工将在不同的任务中发挥作用,MasRouter将为每个任务定制最佳智能体团队,grok和deepseek在多智能体系统中并肩作战将成为现实!
实验分析
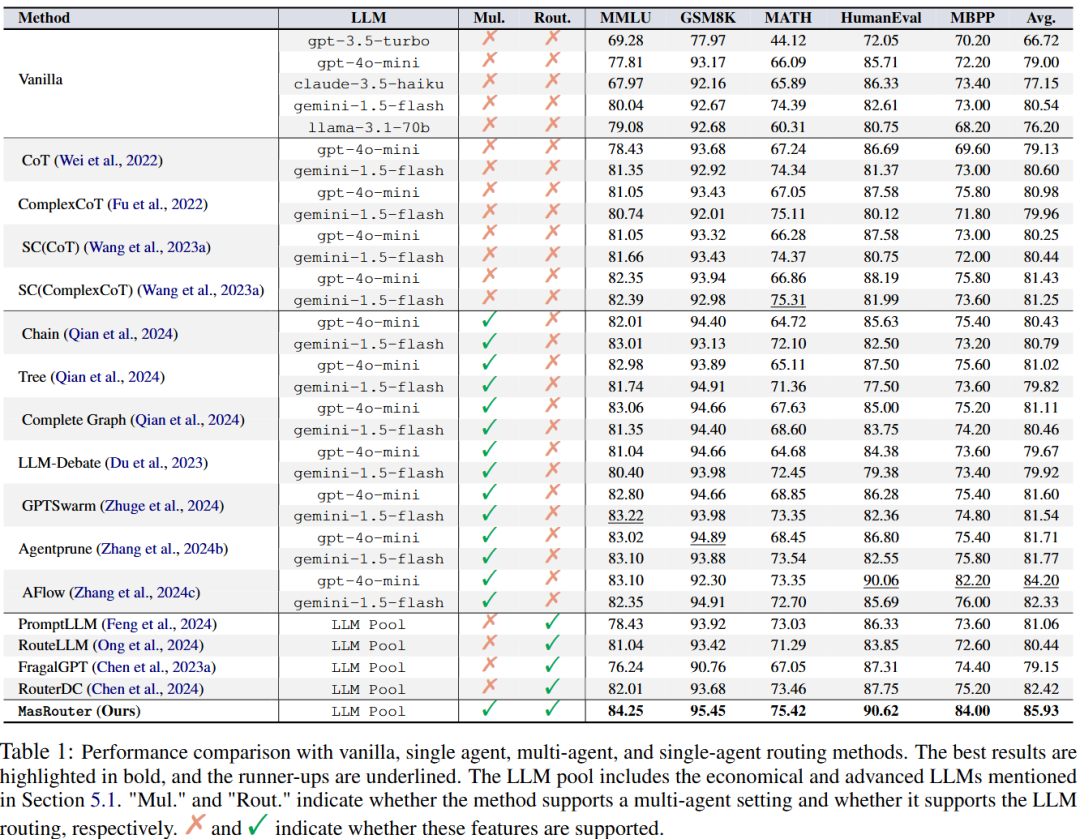
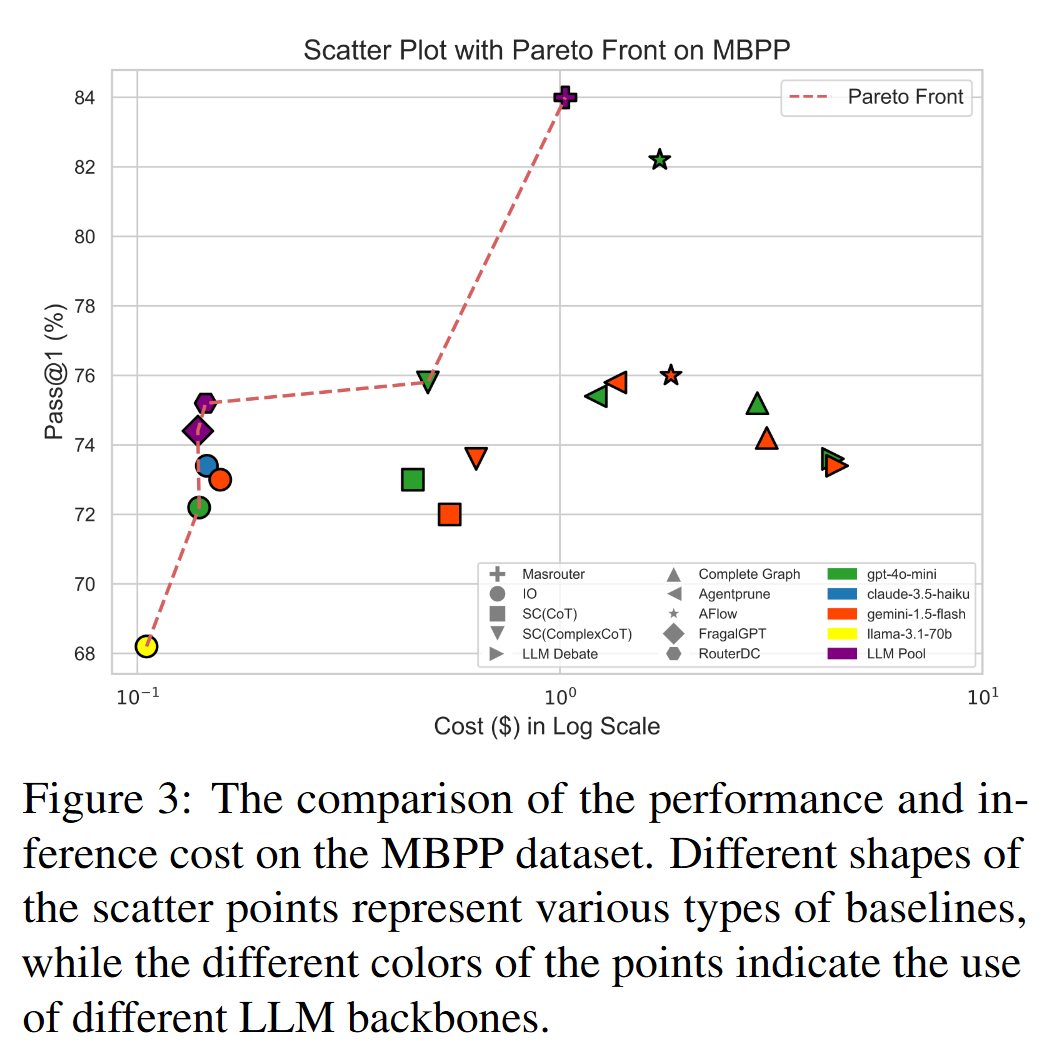
MasRouter 与其它单智能体方法(如CoT、ComplexCoT等),多智能体方法(如GPTSwarm、AFlow等)以及单智能体Routing方法(如)在五个基准数据集上进行了测评,结果如下图所示。MasRouter不仅超越了之前的SOTA多智能体方法,还大幅降低了推理开销。例如,在MBPP数据集上,MasRouter实现了成本效益的Pareto前沿最佳性能,与AFlow相比,性能提升了1.8%8.0%,推理开销减少了40.22%43.78%。此外,MasRouter还可以作为其他多智能体方法的无缝插件,为多智能体系统提供更加灵活、高效的推理能力。
我们还对 MasRouter 在不同benchmark上所设计出来的协作结构进行了可视化。可以观察到,由 MasRouter 生成的多智能体拓扑高度依赖于具体任务的上下文及其难度。相比之下,在更复杂的案例中, MasRouter 构建了更为复杂的通信图。

结语
MasRouter首次提出了多智能体系统路由(MASR)的概念,并给出了一个简单而强大的解决方案。无论是代码生成、数学推理还是其他复杂任务,MasRouter都能为你提供高效且经济的解决方案。我们希望MasRouter能够激发更多研究者探索多智能体系统的潜力,让多智能体推理更加高效、灵活!如果你对MasRouter感兴趣,不妨试试它吧!
相关论文
论文标题:MasRouter:Learning to Route LLMs for Multi-Agent Systems
论文链接:https://arxiv.org/abs/2502.11133
代码链接:https://github.com/yanweiyue/masrouter
相关引用
[1] Chain-of-Thought Prompting Elicits Reasoning in Large Language Models
[2] Complexity-Based Prompting for Multi-Step Reasoning
[3] GPTSwarm: Language Agents as Optimizable Graphs
[4] AFlow: Automating Agentic Workflow Generation
(文:PaperAgent)