
与传统刚性机器人相比,软体机器人技术受自然界中生物系统的多功能特性启发,能够通过使用软体材料和多种驱动方法模拟生物体的柔顺性和环境适应性,具有显著优势。然而,尽管软体机器人在理论上具备广泛的应用潜力,但其在复杂和动态环境中执行多功能任务时,仍面临重大挑战。
为应对这一挑战,此前曾有研究人员提出了基于仿生的多功能设计方法。他们通过探索硅橡胶、介电弹性体、水凝胶和液晶弹性体(LCE)等各类柔性材料,尝试增强软体机器人的多功能性。其中,LCE因其大规模可逆驱动、高可加工性和可编程性等出色性能而备受关注。

LCE纤维的刺激响应机理
作为一种热响应材料,LCE能够通过温度变化实现体积变形,并在冷却后恢复初始状态。通过精确控制液晶原的排列、几何形状和组成,已有研究人员开发出了多种类型的驱动器,实现通过编程来实现特定的变形模式,但现有的LCE纤维驱动器大多局限于单轴或受限变形模式,难以实现复杂任务所需的多自由度、多维运动。
▍提出新策略,实现多功能软体驱动器高效创建

传统编织物:绳结、渔网、中国结、花篮
针对上述问题,浙江大学航空航天学院的研究团队提出了一种基于LCE纤维的多功能软驱动器设计策略。该策略结合了绳结技艺与电驱动LCE纤维的先进响应特性,通过预设编织图案和手工编织技术,开发出能够表现多种变形模式的驱动器。这一方法不仅增强了软体机器人的多功能性,还简化了传统制造工艺,减少了对复杂设备的依赖,实现了高效创建多功能软体驱动器。
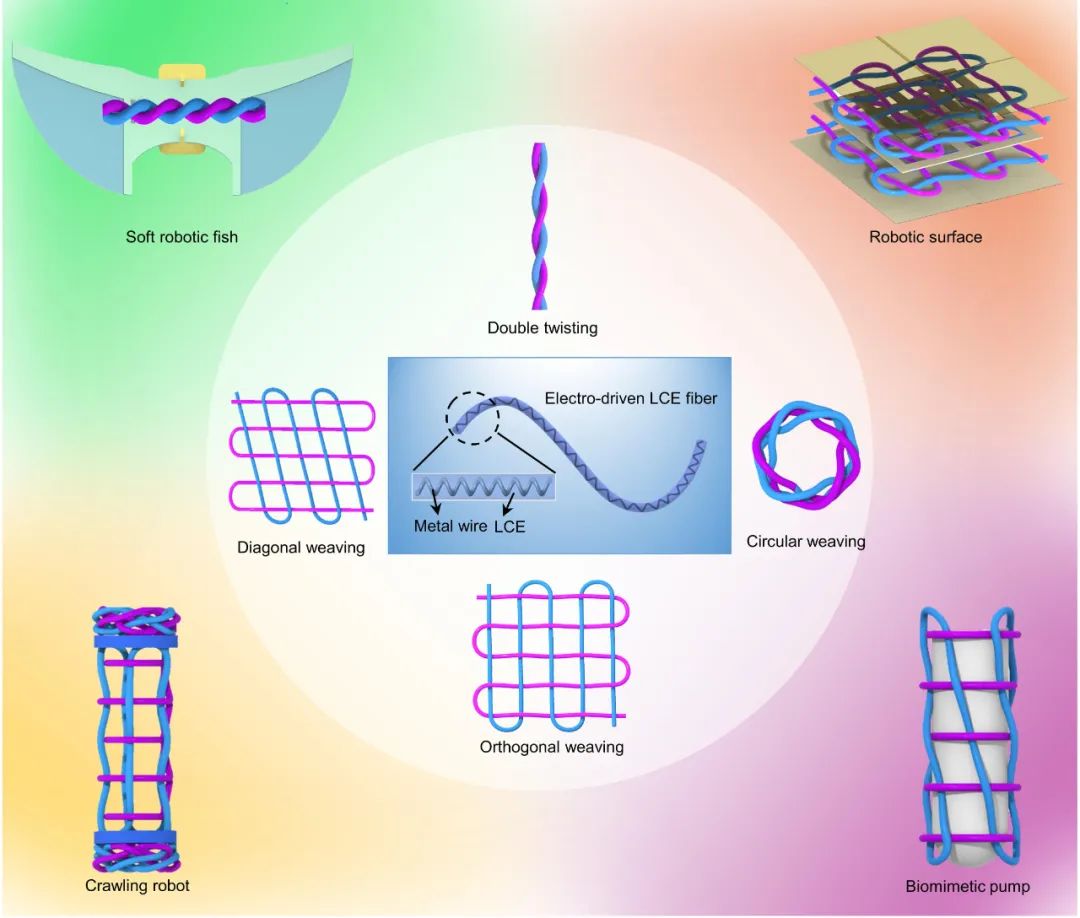
用于多功能软体机器人的编织LCE 纤维软体驱动器的设计策略
为了验证该策略的有效性,研究团队探索了多种编织图案,并开发了四种不同类型的软驱动器:双捻编织驱动器(DTWA)、圆形四股编织驱动器(CFWA)、正交编织驱动器(OWA)和对角编织驱动器(DWA)。这些驱动器能够实现表面形状可编程性、仿生血液泵送以及多种运动模式(如爬行和游泳),为软体机器人在复杂任务中的应用提供了新的可能性。

论文发表相关期刊
当前,该研究成果的相关论文已以“Weaving liquid crystal elastomer fiber actuators for multifunctional soft robotics”为题发表在Science Advances上。论文作者包括杨虎啸、尹潇锋、张超、陈柏宏、孙鹏、徐彦,通讯作者为徐彦教授。
那么,该研究成果具体是如何实现的呢?接下来,和机器人大讲堂一起来深入了解~
▍电驱动 LCE 纤维的制作与性能分析
电驱动液晶弹性体(LCE)纤维的制作是软体机器人技术中的一项关键工艺。研究团队首先制备了毫米级直径的电驱动LCE纤维,其化学成分如下图所示。通过对这些电驱动 LCE 纤维的驱动响应进行全面表征,并测量其在各向异性状态和各向同性状态下的长度变化,研究团队对LCE 纤维的驱动性能进行了评估。

LCE纤维的化学成分
实验结果表明,当电流施加到嵌入其中的金属线上时,产生的热量会触发电驱动LCE纤维从各向异性状态转变为各向同性状态,导致纤维收缩。电流停止后,纤维逐渐冷却并恢复至原始长度。为确保实验准确性,研究团队使用8克的塑料夹固定纤维的自由端,施加轻微张力以防止收缩过程中的卷曲和扭曲。
对于电流强度与驱动性能的关系,研究团队测试了五种不同强度的电流(0.15、0.2、0.25、0.3和0.35 A),并计算了相应的输入功率(1.3 W、2.3 W、3.55 ± 0.05 W、5.2 W和7.25 ± 0.05 W)。通过热红外摄像机以1 Hz的频率监测纤维的瞬态温度变化,研究团队发现:随着电流从0.15 A增加到0.3 A,LCE纤维的最大驱动应变从12.6%提升至43%。进一步将电流增加至0.35 A虽未改变峰值驱动应变,但显著提高了响应速度,这表明在驱动效率达到极限时,增加电流可优化响应时间,这对需要快速响应的应用尤为重要。

电驱动LCE纤维的特性
为定量评估LCE纤维的驱动能力,研究团队在向列相状态下施加0.35 A电流,直至纤维断裂。测试结果显示,四个样品的驱动力在约15秒内从零增加至峰值,平均极限力为2.5 N。值得注意的是,尽管纤维断裂,内部嵌入的金属线仍保持完好,确保了电路的完整性和系统的结构稳定性,避免了潜在的级联故障。
同时,研究团队也对比了有无内置电热丝的LCE纤维的力学性能,重点分析了刚度和承载能力。通过应力-应变曲线计算杨氏模量,发现无电热丝的LCE纤维杨氏模量为3.18 MPa,而加入电热丝后增加至3.94 MPa。这一结果表明,嵌入电热丝可有效增强LCE纤维的刚度,从而提高其承载能力。此外,LCE纤维在较大拉伸应变下仍不会断裂,显示出其在可接受应变范围内具备大量变形能力。
▍多功能软执行器编织技术的探索
为了实现复杂变形和高效驱动,研究团队通过对电驱动 LCE 纤维的多功能软致动器各种手工编织技术进行探索,开发了多种多功能软体驱动器。这些编织技术包括双捻编织、圆形四股编织、正交编织和对角编织,每种技术均针对不同的应用需求进行了优化。
-
双捻编织驱动器(DTWA)
双捻编织由两根LCE纤维交织而成,能够实现扭转和收缩等多模变形,同时有效分配应力并具有更高负载能力。这种紧凑设计特别适用于密闭空间内复杂变形和增强承载力的需求。在双捻编织的基础上,研究团队通过交织和编织两根电驱动 LCE 纤维制作了 DTWA。实验观察表明,DTWA的驱动效率与周围介质的热导率密切相关。在高热导率的水环境中,DTWA在0.65 A电流下6秒内实现了37.18%的应变。此外,DTWA在水下环境中的最大驱动力为2.6 N,显著高于单链LCE纤维的1.2 N。负载测试显示,DTWA可承受高达150 g的负载而不失效,展现了其出色的适应性。

DTWA和CFWA的表征
-
圆形四股编织驱动器(CFWA)
在双捻编织的基础上,圆形四股编织通过交织四根LCE纤维,实现了可控的径向膨胀和收缩,纤维间的协同作用和多向应力分布优化了驱动力,实现了精确的径向运动。为了扩展电驱动 LCE 纤维的应用,研究团队采用圆形四股编织方法制作了 CFWA。实验结果表明,CFWA的变形能力显著,外径随电流增加而减小。例如,施加0.2 A电流90秒后,直径减少40.6%。CFWA的收缩力与预设直径和电流强度密切相关,精确的电流控制对实现稳定收缩力至关重要。
-
正交编织驱动器(OWA)
正交编织将两根LCE纤维沿X轴和Y轴垂直排列,形成对称稳定的结构。通过采用正交编织技术将两根电驱动 LCE 纤维沿X轴和Y轴垂直放置,研究团队成功构建了 OWA。OWA 具有 5×5 线图案布局,每个交叉点都用硅胶加固,以确保均匀性和结构稳定性。通过调整施加的电流来控制纤维在各个方向上的差异收缩,可以精确控制 OWA 的尺寸变化。通过调整电流OWA可实现单向或双向收缩,面积最大可减少70%。这种设计适用于需要高稳定性和多向响应的应用场景。

OWA和DWA的表征
-
对角编织驱动器(DWA)
对角编织以60°角交织两根LCE纤维,能够实现复杂的双向变形。通过采用对角编织技术,研究团队研制了一种 DWA,当一根 LCE 纤维收缩时,它能够表现出复杂的双向变形。实验显示,DWA在单轴电流下沿相应方向收缩,而在双轴电流下面积减少高达50%。这种设计突出了初始纤维结构对变形行为的几何影响。
▍多功能软驱动器编织技术的软机器人应用与创新
得益于在多功能软体驱动器编织技术方面取得的显著进展,研究团队开发了多种软机器人系统,展示了该技术的广泛应用潜力。这些系统包括可编程机器人表面、心脏模拟泵、爬行机器人和仿生机器鱼。
-
可编程机器人表面
研究团队设计了一种可编程机器人表面,结合了两个正交编织驱动器(OWA)和一个被动网格层,显著提升了机械刚度和稳定性。通过独立控制两个OWA的电流,表面能够实现平面内和平面外的连续变形,展示了其在3D形状编程和物体操控方面的能力。

可编程机器人表面
实验表明,该表面能够通过精确调节电流实现圆顶、圆柱形等多种形状变化,并成功操控不同大小的球体,展示了其在交互任务中的潜力。
-
心脏模拟泵
受心肌结构的启发,研究团队开发了一种仿生泵,采用对角编织驱动器(DWA)和弹性室设计,模拟心肌的螺旋和圆形纤维排列。

受心肌启发的仿生泵
实验结果显示,该泵能够实现圆周收缩和扭转运动,最大泵送高度达到741毫米,并在循环测试中表现出良好的耐用性。此外,团队还构建了一个仿生循环系统,成功模拟了人体血液循环过程,验证了该泵在仿生应用中的多功能性。
-
爬行机器人
研究团队设计了一种多功能爬行机器人,结合了连续纤维编织驱动器(CFWA)、OWA和DWA,实现了灵活的自适应运动。机器人通过锚定单元和收缩单元的协调驱动,能够在垂直管道和复杂几何表面中稳定爬行。

多功能爬行机器人
实验表明,机器人能够在20个驱动循环中爬升超过其身体长度1.6倍的距离,并成功检测到气体泄漏,展示了其在工业检测和环境监测中的应用潜力。
-
仿生机器鱼
最后,研究团队还开发了一种仿生机器鱼,采用双扭转编织驱动器(DTWA)驱动,模拟鳐鱼的胸鳍运动。通过调节电流和频率,机器鱼能够实现高效的水下推进,最大游泳速度达到15毫米/秒。

软体机器鱼
经过100次循环测试,机器鱼表现出稳定的运动性能,展示了其在水下探索和监测中的潜力。
这些研究成果不仅展示了编织型多功能软体驱动器技术的多样性和灵活性,也为未来软体机器人在医疗、工业和环境监测等领域的应用提供了新的可能性。
参考文章:
https://www.science.org/doi/10.1126/sciadv.ads3058
(文:机器人大讲堂)