
抓取和操控物体一直是工程领域的一项挑战,尤其是在设计能够同时实现自适应、快速和稳定抓取行为的机器人夹持器方面。近期,中山大学研究团队提出了一种新型双稳态张拉整体结构,并开发了一种无源驱动的自适应、快速、稳定的多功能夹持器。研究成果以“Adaptive,
rapid, and stable Trident robotic gripper: A bistable tensegrity structure
implementation”为题,发表在机械领域国际英文TOP期刊《IEEE/ASME
Transactions on Mechatronics》。在本项研究中英国伦敦南岸大学Hamed Rajabi、大连理工大学彭海军教授、中山大学先进制造学院吴嘉宁副教授为共同通讯作者。

▍双稳态张拉整体自适应夹持器设计思路
本文提出了一种基于柔性张拉整体结构的双稳态机构,该机构能够在200毫秒内完成快速形状变化。在此基础上,研发了一种名为T-R的多功能无源夹持器。这种无需外源驱动的通用夹持器展现了类似于自然捕蝇草叶片捕食的高效适应性和快速反应能力,表现出卓越的抓取性能。通过调整几何参数实现的可调双稳态特性,为夹持器设计提供了极大的灵活性。夹持器在稳定状态之间切换后能够保留残余能量,从而实现无需持续供能的稳定抓取。该夹持器的优势为构建能够在各类领域中处理形态各异物体的机器人系统提供了可能,同时无源驱动的机制也使其能够温和地抓取和快速移动昆虫。
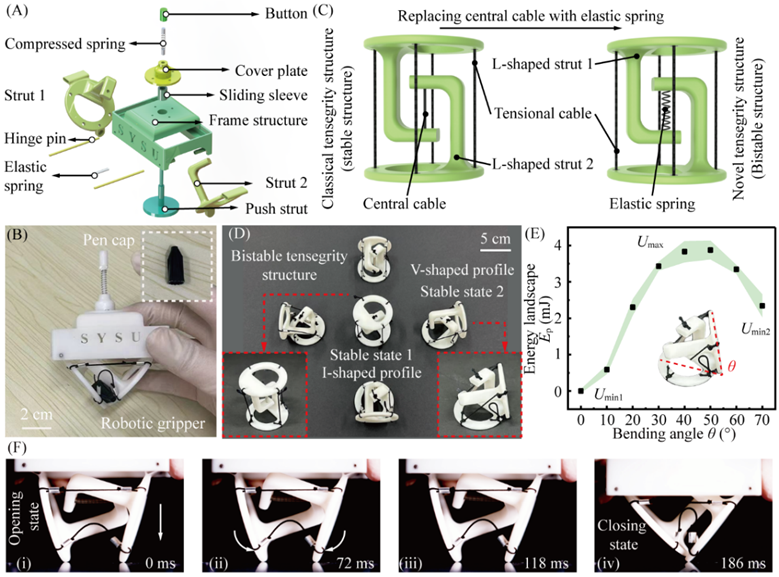
该夹持器能够在张开和闭合两种状态之间进行快速切换,切换时间约为200毫秒。夹持器由三个主要部分组成:双稳态机构、框架结构和复位机构。其中,双稳态机构通过用弹性部件替代传统张拉结构的中心绳构建而成,可通过施加弯矩触发非线性变形,实现从稳态1到稳态2的切换。复位机构由按钮、推支柱、滑动套和压缩弹簧组成,按下按钮时,双稳态机构能够从稳态2切换回稳态1。
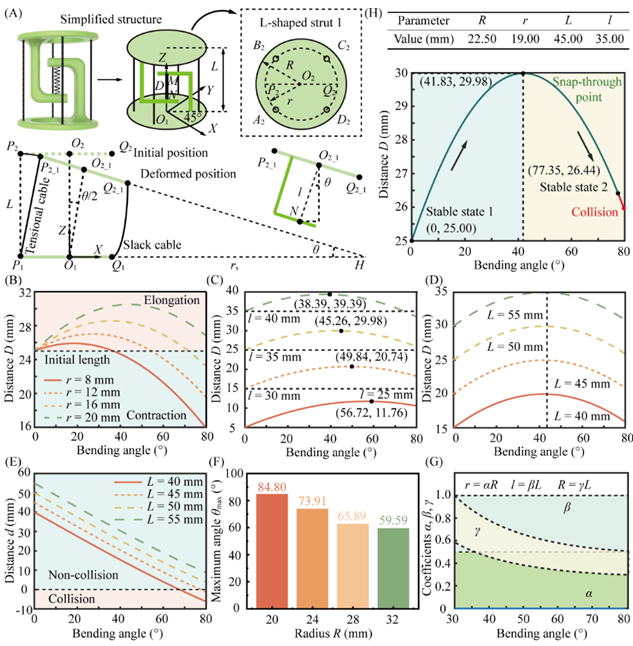
▍双稳态张拉整体结构理论模型与参数分析
为了深入分析新型张拉整体结构的双稳态特性,研究人员建立了一个理论模型,对整个变形过程进行了详细分析。通过关注弹簧长度的变化,研究了关键几何参数对双稳态行为的调控作用。随后,研究人员制定了统一的参数确定框架,确保满足避免碰撞条件、双稳态触发条件以及弹簧拉伸条件,为双稳态结构设计提供了可靠的参数选择方法。
▍双稳态机器人夹持器力学性能评估
研究人员进一步对夹持器在抓取过程中的力学性能进行了全面评估。具体而言,本文评估了不同类型的稳态切换触发方式,并分析了实现稳态切换所需的最小驱动力、稳态切换过程中产生的有效抓取力,以及稳态切换后机构所保持的残余稳定力,并对这些关键参数进行了系统的表征。

▍双稳态机器人夹持器多场景适用性验证
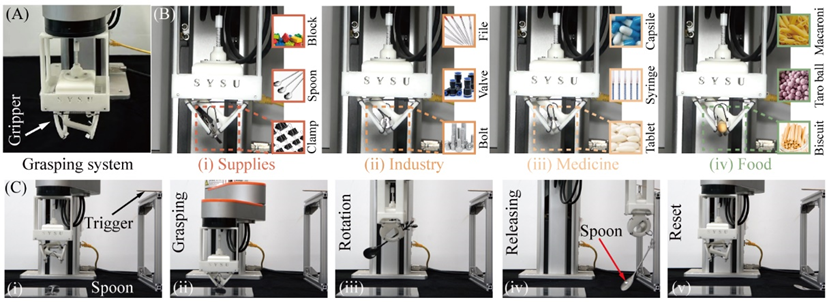
为了展示双稳态夹持器在不同应用场景中的抓取适应能力,本文首先将双稳态夹持器与刚性机械臂集成,构建了一个自动抓取系统。研究结果显示,该夹持器在物体抓取方面展现出极高的适应性,不仅能够轻松抓取轻质和微小物品,还能有效适应抓取不规则轮廓的物体。通过制定机械臂的运动行为,夹持器可以实现接近、接触、抓取和转移物体的操作,并可通过开放的可访问端口以多种方式触发复位机构释放物体。
此外,该夹持器还能适用于对昆虫无损伤的场景下的快速抓取。该夹持器在无源条件下很好地适应了野外环境中的复杂抓捕任务,其操作过程如图所示。实验结果表明,双稳态夹持器在各种复杂场景中表现出优异的适应性和高效的抓取能力。同时,由于夹持器在闭合过程中产生的冲击力小于1N,展示了对小型昆虫进行无损抓取的潜力。实验结果进一步证明,双稳态夹持器能够在无需依赖精确力反馈控制系统的情况下,成功实现对快速移动昆虫的无损抓取。
期刊:IEEE/ASME
Transactions on Mechatronics
题目:Adaptive,
rapid, and stable Trident robotic gripper: A bistable tensegrity structure
implementation
作者:Jie
Zhang, Hao Yang, Yuwen Zhao, Jinzhao Yang, Yasemin Aydin, Shengkai li, Hamed
Rajabi, Haijun Peng, Jianing Wu
DOI:
10.1109/TMECH.2024.3516948
本课题组基于该双稳态结构的其他相关研究如下:
https://doi.org/10.1002/adfm.202410217
(文:机器人大讲堂)