
在长距离行军、户外探险、应急救援等长时间负重行走的高强度场景中,传统背负系统会将负载产生的垂向惯性冲击,毫无缓冲地直接传递给使用者,这极易引发肌肉疲劳与关节损伤。与之形成对比的是,主动悬浮背包融合可穿戴技术与主动控制机制,能够动态调节负载与人体之间的相对运动,在降低负载冲击力、提升使用者舒适性与代谢效率方面展现出巨大潜力。
围绕主动悬浮背包的主动控制策略与人机交互性能,近年来众多科研人员展开了深入研究,并相继提出基于步态识别、动态反馈和能量补偿等多种控制方法,在减轻人体负担、提升人体运载代谢能效率上取得一定进展。但相关研究普遍对复杂步态与突发扰动适应性不足:一方面,控制策略过度依赖稳定节律;另一方面,结构设计缺乏对负载传递路径的有效调节能力,导致难以与人体运动实现良好协调。
如何构建一种能够兼顾多地形适应与负载主动转移的智能背负系统,已然成为降低人体运载负担,提升人体运载效率的关键突破口。
▍开发负载转移悬浮背包系统,突破复杂环境适应性难题
面对上述挑战,来自华中科技大学的黄剑、曹瑜团队,在国家自然科学基金和国家重点研发计划等项目大力支持下展开深入研究,并成功开发出一种具有生物启发式振荡隔离的负载转移悬浮背包系统。
视频1 主动悬浮背包性能表现实验测试
据悉,该悬浮背包系统的设计思路,源自对生物特性与人体运动机制的深度探索。一方面,团队观察到人体在动态行走时,腰部与肩部协同参与负载传递,但传统背包将大部分负载集中于肩部,易引发疲劳。基于此,团队构建肩 – 腰双支撑结构,并引入可控的负载转移机制,实现负载在不同支撑部位间的合理分配,从而减轻肩部压力。另一方面,自然界中鹤类等长腿鸟类腿部的非对称支撑和非线性弹性响应结构,使其在复杂地形下仍具备良好稳定性与减振性能。受此启发,团队将具有高静刚度 – 低动刚度(HSLDS)特性的仿生振荡隔离模型引入系统设计,并首次应用于主动悬浮背包,以抑制负载振荡、降低动载荷传递。
从功能实现角度,该悬浮背包系统创新性地融合结构仿生与主动控制策略,具备负载转移与振荡隔离双重功能。其能够在多种复杂步态和地形变化场景下,实现负载的有效转移与振荡隔离,不仅降低了人体肩部承受的压力,还提升了运载代谢能效率,切实解决了传统背负系统在复杂地形中给使用者带来高肩部负荷的问题。
为全面验证负载转移式悬浮背包的性能,研究团队在多种运载地形条件下开展了系统性实验测试。实验数据显示,在平地行走时,该系统使人体运载代谢能效率提升 18.68%;楼梯场景下,提升幅度达 9.58%;在涵盖平地行走、下楼梯、上坡等复杂不规则地形条件下,仍实现 12.35% 的能效改善。这些结果表明,该悬浮背包系统在不同应用场景中均展现出良好性能与广泛适应性。
图1 研究成果相关发布信息
目前,该研究成果的相关论文已以《Load-Transfer Suspended Backpack With Bioinspired Vibration Isolation for Shoulder Pressure Reduction Across Diverse Terrains》为题发表于机器人领域顶级期刊《IEEE Transactions on Robotics》,华中科技大学为第一完成单位,曹瑜研究员为第一作者,黄剑教授为通讯作者。
▍融合负载转移机制与振荡隔离策略,实现双重减负功能
据了解,悬浮背包系统采用了分离式背板设计,形成肩部与腰部共同承载的双支撑结构(如图2所示)。不同于传统背包将全部载荷集中在肩部的单点支撑方式,该结构通过背板的机械连接,将部分负载由肩部引导向下分担至腰部。
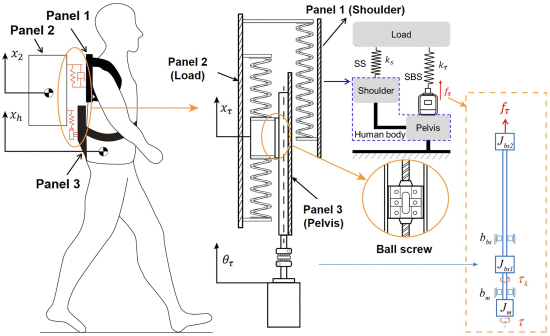
图2 负载转移背包在人体负重过程中的示意图
同时,为应对人体运动过程中负载所产生的惯性冲击与振荡问题,系统在负载与驱动器之间引入了弹性元件,构建成串联弹性执行器(Series Elastic Actuator,以下简称SEA)。SEA的引入一方面提供了柔顺性,能够缓冲负载振动带来的冲击,提升系统顺应性;另一方面,SEA可主动调节负载与人体的相对运动,降低动载荷向人体的直接传递。最终,悬浮背包不仅能在静态条件下转移负载减轻肩部负荷,同时在动态运动中主动调节负载行为,减少负载的惯性冲击,实现静–动态一体的减压目标。
-
静载荷转移:模型构建与量化调节
为实现背包系统在动态行走过程中的减压效果,研究团队构建了人–悬浮背包的双质量耦合振荡模型(如图3所示),系统分析了电机驱动单元在负载由肩部向腰部转移过程中的力学作用与调节机制(如视频2所示)。通过一组安装于背板之间的线性驱动器(电机–连杆结构),系统主动调节负载与肩部支撑点之间的相对位移,进而动态改变载荷在人体不同部位之间的分布关系。通过该驱动单元的主动调节,背包所受重力可在一定范围内从肩部向腰部支撑结构过渡,实现负载路径的重构。
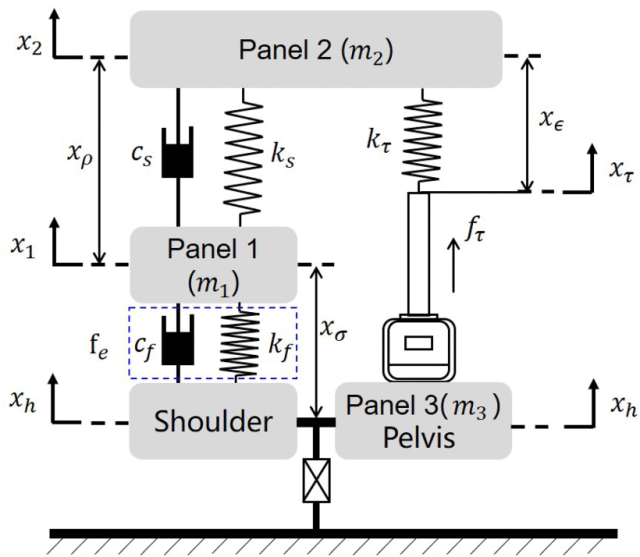
图3 负载转移背包的动力学原理:主动悬浮背包动力学模型
视频2 负载转移背包的动力学原理:负载转移原理
不仅如此,为研究团队还提出了一种基于支撑力变化的负载转移量化方法,实现了悬浮背包系统中负载在人体上下半身的动态调节与合理分配。该方法以预设的负载转移比例为控制目标,旨在优化人体上下半身的负载平衡,从而提升整体运载过程中的代谢能效率。具体而言,系统通过测量肩部与腰部支撑的受力变化,结合人体运动状态与电机驱动输入,反推出实现目标负载分配所对应的电机期望位置。该方法不仅为控制系统提供了明确的调节依据,也为实现负载在肩部与腰部之间的协调转移提供了基础。
-
动载荷降低,仿生结构加持的多地形高效隔振
在复杂地形条件下,如何提升悬浮背包的振荡隔离性能是关键。研究团队从自然界鹤类等长腿鸟类的运动机制中汲取灵感,(如图4所示),构建了一种具备高静刚度低动刚度特性的仿生振荡隔离结构,并将其首次应用于悬浮背包系统中。该结构的核心在于仿生自然界中非对称支撑构型与非线性弹性响应机制,在保障负载静态稳定支撑的同时,显著提升对动态冲击与地形扰动的自适应能力,有效缓解负载向人体传递的瞬时动载,从而进一步增强穿戴过程中的背负舒适性与运动安全性。
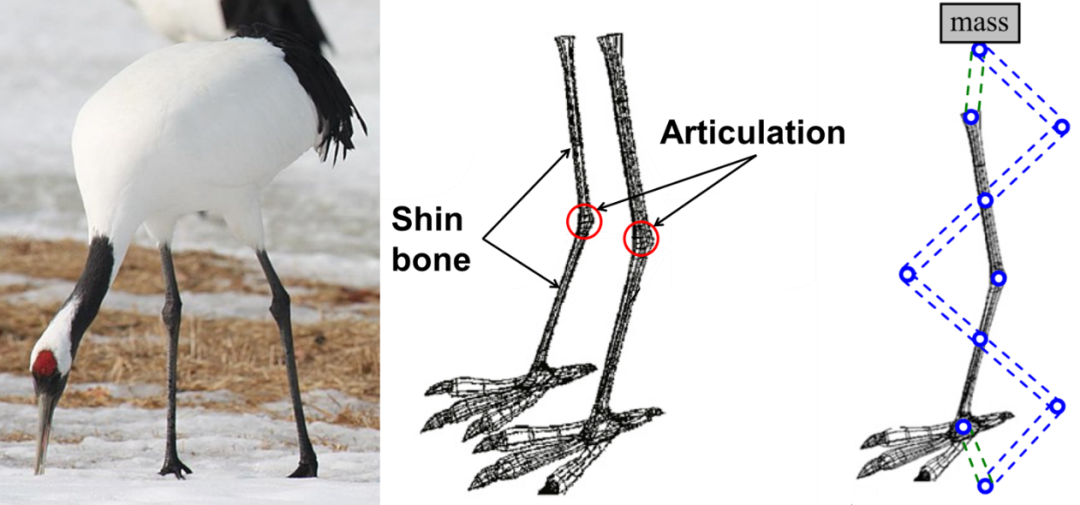
图4 (a)鹤 (b)腿部示意图(c)受鹤腿启发的不对称结构
基于该仿生结构,团队进一步建立了相应的简化非线性动力学模型(如图5所示),分析了结构质量分布、弹性、阻尼特性等参数对系统动态响应的影响。通过理论推导与仿真验证,系统性地评估了其输入输出稳定性与扰动响应性能,确保模型在不规则地形行走和非周期性步态模式下亦能保持有界可控的动态响应,为后续控制策略提供了可靠的期望轨迹基础与鲁棒性支持。
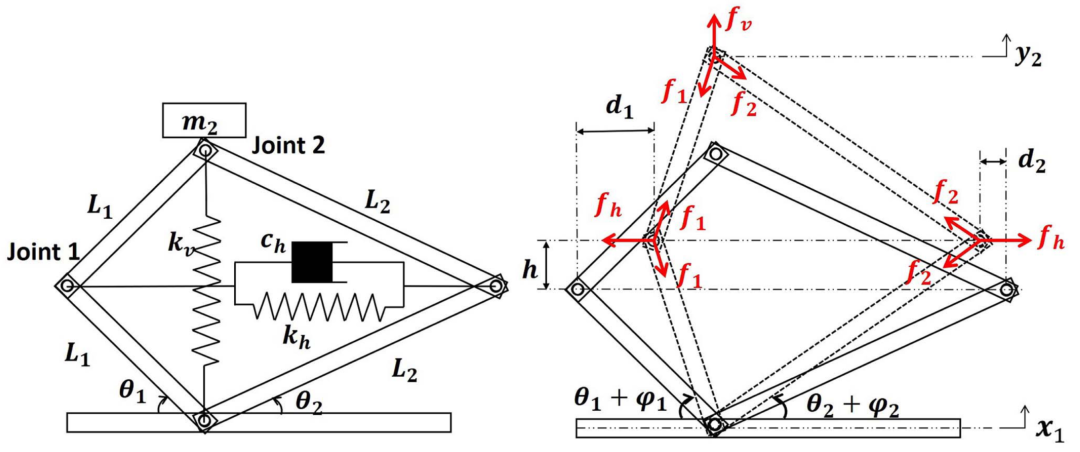
图5 基于鹤腿简化结构的生物启发式振荡隔离模型
-
统一的运动控制框架
有了上述结构与机制的创新,还需要一个有效的控制框架来整合功能。为实现主动悬浮背包的运动控制,研究团队构建了负载转移和振荡隔离统一的控制框架(如图6所示)。该框架主要包括期望轨迹生成模块和位置控制模块两个部分。期望轨迹生成模块融合了静载荷转移和振荡隔离两大模型,接受期望的负载转移比例和负载振动输入,计算基于SEA控制器的期望位置指令。
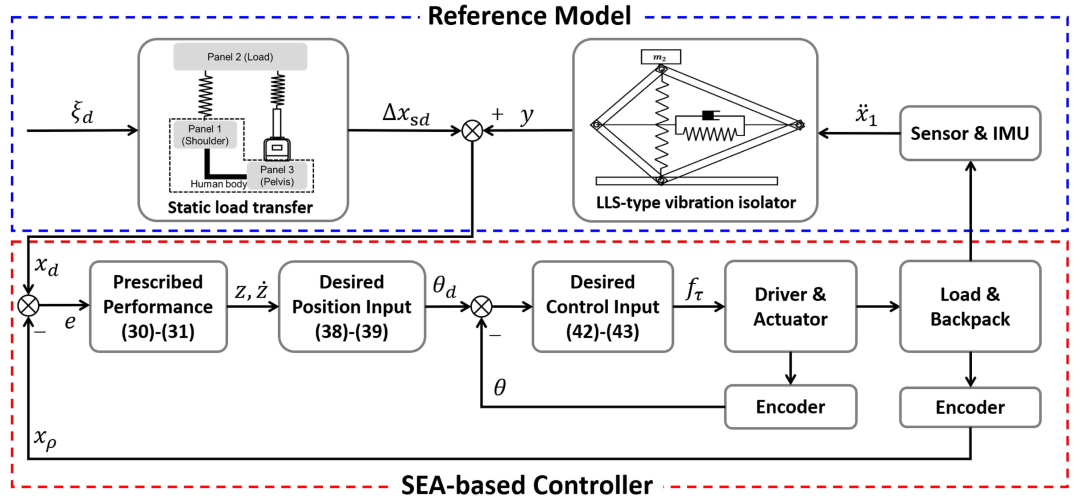
图6 悬浮背包统一的运动控制框架
同时,位置控制模块则以SEA控制器为核心,负责实现对期望位置指令的高精度轨迹跟踪,并利用SEA的机械弹性特性,缓解负载与人体之间的相对运动冲击,提升系统的稳定性和舒适性。最终该控制框架能够同时模拟了负载转移和生物启发式振荡隔离模型的功能,实现了主动悬浮背包在静–动态条件下对肩部载荷的双重减压,显著优化了人机交互体验。
▍复杂环境测试,验证机器人性能与应用潜力
理论与设计上的创新,还需通过实际测试来验证。为全面评估主动悬浮背包在多样化步态模式与实际运载环境中的性能表现,研究团队招募了8名志愿者,分别在平地、楼梯、复杂地形(包含坡道、楼梯与平地组合)以及野外山地环境中进行了系统性实验。实验过程中,志愿者背负悬浮背包并挂载10 kg负载,分别在跑步机、楼梯以及复杂地形(包含坡道、楼梯和平地)上完成行走测试。
-
平地实验
在平地实验中,志愿者佩戴悬浮背包,在跑步机上以5 km/h的速度行走,实时监测并记录肩部压力、负载加速度及代谢能耗的变化,如图7所示。结果显示,相较于负载锁定状态,悬浮背包在静载荷和动载荷两方面均实现显著减轻:肩部压力平均值降低了45.7%,肩部压力的峰值降低了46.6%,负载最大加速度减少了72.7%。同时,人体运载代谢效率平均提升了18.68%。
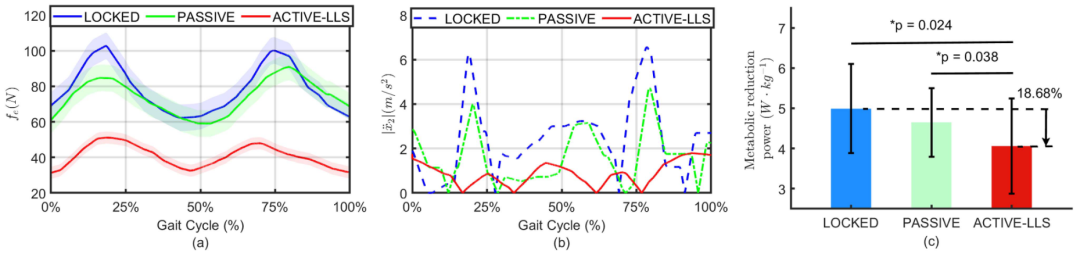
图7 人体在平地行走时的系统性能:(a)肩部压力 (b)垂直负荷加速度 (c)总代谢减少
-
楼梯实验
楼梯实验时,志愿者佩戴负载转移悬浮背包,并攀登台阶,每级高约15厘米,如图8所示。实验结果表明,与负载锁定相比,悬浮背包使肩部压力平均值降低44.6%,肩部压力的峰值降低了48.4%,负载最大加速度减少55.5%,人体运载代谢效率平均提升9.58%。
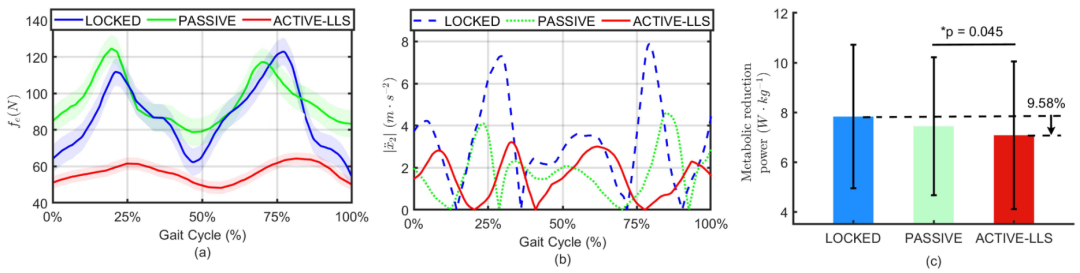
图8 人体爬楼梯时的系统性能:(a)肩部压力(b)垂直负荷加速度 (c)总代谢减少
-
复杂地形实验
复杂地形实验的环境包括坡道、楼梯及平地,其中坡道长约3.45米,倾斜角10°;楼梯4级,每级高约15厘米;楼梯底部与平地间距约3.3米。参与者需连续循环完成上坡、下楼及平地行走,每个循环约16秒,共计18个循环,如图9所示。实验结果显示,相较于负载锁定,悬浮背包使肩部压力平均值降低36.6%,肩部压力的峰值降低了38%,负载最大加速度减少44.6%,人体运载代谢能效率平均提升12.35%。
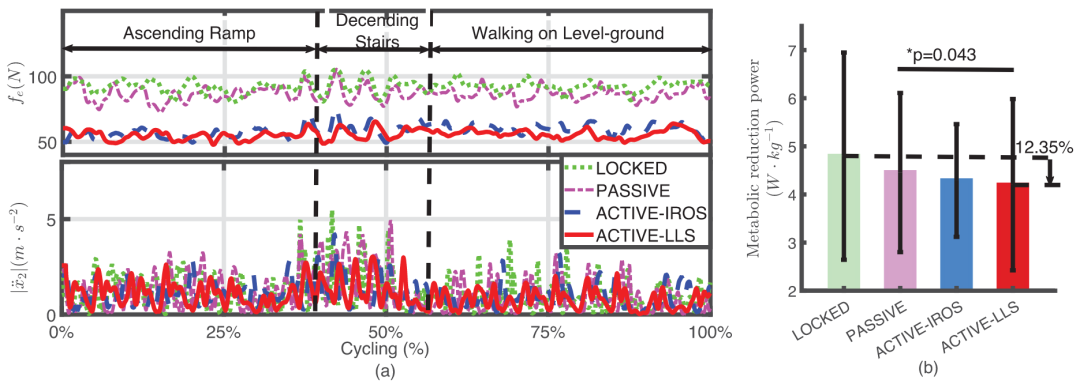
图9 人类在复杂地形中行走的时间演变:(a)肩部压力和垂直负荷加速度 (b)总代谢减少
-
山地实验
在野外山地实验中,志愿者在三种典型场景中完成步行实验:(1)平地步行:志愿者在平坦的地面上行走;(2)跨越步行:志愿者跨越高约35 cm的平台;(3)山地步行:志愿者在真实山地环境中上坡行走,该场景具有不规则地面起伏,并夹杂有树枝和碎石等自然障碍,具有较高的复杂性和挑战性。实验结果如视频所示。
视频6 山地实验
▍结语与展望
该研究提出的基于仿生振动隔离的负载转移式悬浮背包系统,实现了负载的优化分配与高效振动抑制,显著减轻了使用者的肩部负担,大幅提升了负重过程中的代谢效率。相较于传统刚性背负方式,该系统在复杂多变的负重环境中展现出更强的适应性与稳定性。
展望未来,研究团队将在此基础上,深入推进主动悬浮背包的智能感知与自适应控制研究。通过融合多模态传感信息与人机协同策略,重点攻克复杂地形下的动态负载调节与长时负重耐久性等关键技术难题,向军事巡逻、应急救援、野外探险等多类高强度任务场景,推动主动悬浮技术向轻量化、智能化、实用化方向发展,为高性能负重装备提供创新解决方案。
参考文章:
https://ieeexplore.ieee.org/document/10970433
(文:机器人大讲堂)