
机器人大讲堂获悉,机器人触觉技术领域初创企业「猿声科技」近日成功完成新一轮融资。本轮融资投资方主要为柯力传感。融资资金将主要用于猿声科技机器人全栈触觉技术领域产品研发与产品量产交付。值得关注的是,本轮融资是柯力传感在多维触觉传感与电子皮肤方向进行的重要战略布局。同时,本轮融资也是猿声科技成立以来四个月内获得的第三笔融资,此前该公司已获得李泽湘教授发起成立的深圳科创学院和启高资本的大力支持。

据机器人大讲堂了解,猿声科技【全称:猿声先达科技(深圳)有限公司】成立于2025年1月,是一家专注于机器人触觉技术的初创科技企业,致力于进行多维力、力矩传感、多维触觉传感以及电子皮肤等领域技术自研与产品开发,构建机器人全栈触觉技术解决方案。
在核心团队方面,猿声科技的核心创始成员汇聚了来自全球顶尖学术机构和知名科技企业的精英人才,包括牛津大学机器人中心、帝国理工学院生物工程系、浙江大学控制科学与工程学院等世界知名学术机构的一线科研人员,以及曾任职于华为、高巨创新等顶级科技企业研发部门的行业专家。团队整体兼具世界顶尖的科研能力与丰富的工程实战经验,具备从前沿探索到技术落地的全链条创新能力。
在产品研发与业务扩展方面,猿声科技目前已成功自主研发具备超薄高密度“感算一体”的多维触觉传感器 MultiDT和大面积触觉传感器HexT两款产品,并实现规模量产。
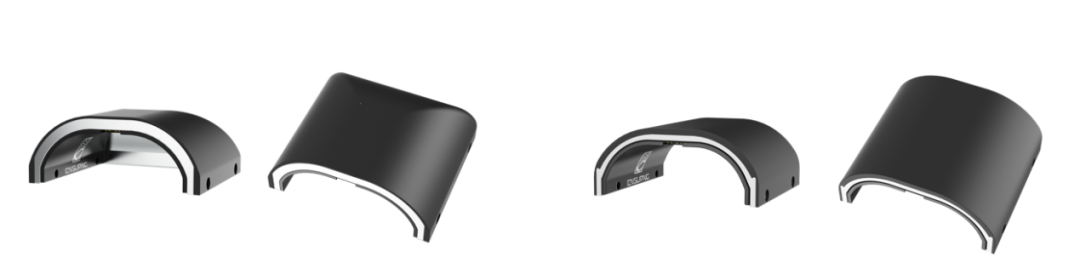
其中,多维触觉传感器MultiDT是一款开创型专为机器人灵巧手指尖应用设计的产品。在技术方面,MultiDT突破了视触觉与霍尔效应类触觉技术的性能瓶颈,并通过空间编码原理实现高密度多维的感知能力,可为机器人提供更全面的智能感知方案。
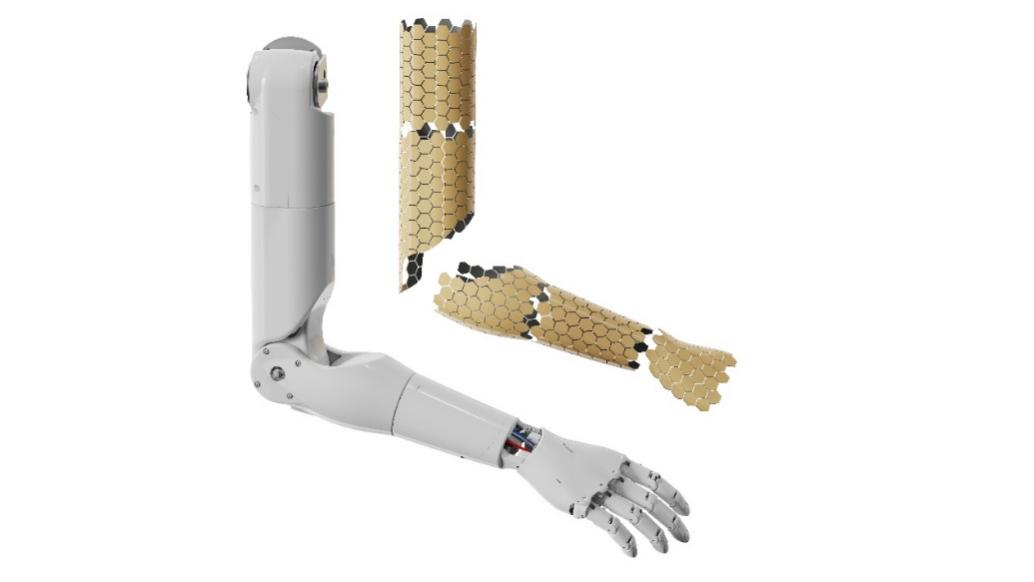
大面积触觉传感器HexT,则采用创新模块化边缘技术架构,具备超高分辨率与高速动态采集功能,可助力全面提升人形机器人的触觉感知能力。更值得一提的是,HexT单台形机器人全身皮肤覆盖成本已实现低于万元,这将有力推动机器人全身电子皮肤的大规模应用加速落地。
据内部消息,猿声科技还将推出RealTSense触觉模态建模与可视化工具链软件,为触觉在大模型训练中的广泛应用提供新的技术实现路径。此外,猿声科技进一步研发的Quadrinity高交互人形机器人平台,用于实现从触觉感知、语义建模到交互决策的全链路闭环。
如需报道企业融资信息,欢迎联系堂博士(13810423387,手机与微信同号)提供相关资料,机器人大讲堂将提供免费报道!
(文:机器人大讲堂)