

家人们,手术机器人真的要独当一面了!外科自动化迎来了一次里程碑式的重大突破!
这次不是简单的辅助操作,不是跟着医生指令动,而是全球首次机器人在无外科医生直接操作情况下,真正独立完成复杂软组织手术——自己看、自己想、自己动刀子的那种!
本周,Science旗下机器人领域顶刊《Science Robotics》最新一期封面文章发表重磅成果:约翰霍普金斯大学团队的手术机器人SRT-H(Hierarchical Surgical Robot Transformer),独立完成了8例胆囊切除术的关键步骤,成功率100%。
划重点:全程自主,无需人类医生干预。而且17种不同类型的任务指令一气呵成。
更牛的是,遇到问题还能自己纠错。平均每台手术自我修正6次,照样完美收官。
要知道,胆囊切除可不是什么简单活儿。光是在美国,每年就有超过70万例。血管粗细不一、位置各异,还得双手精密配合,毫米级的偏差都可能酿成大祸。
有网友发出疑惑:“外科医生要失业了?””以后做手术是不是得先选AI版本?”
别急,让我们来看看这个机器人到底有多能打。
▍从“提线木偶”到”独当一面”:手术机器人的又进化
先说个扎心的事实:即便是大名鼎鼎的达芬奇手术系统,本质上也像是个“高级遥控器”。
医生坐在控制台前,手握操纵杆,机器人在另一头照葫芦画瓢。说白了,有点像没有自主意识的“提线木偶”。
但约翰霍普金斯团队这次的突破,彻底改变了游戏规则。
研究团队在达芬奇研究套件(dVRK)Si的基础上,给机器人装上了“眼睛”和”大脑”。除了标配的立体内窥镜,他们还在器械末端加装了腕部相机,让机器人能360度无死角观察手术区域。
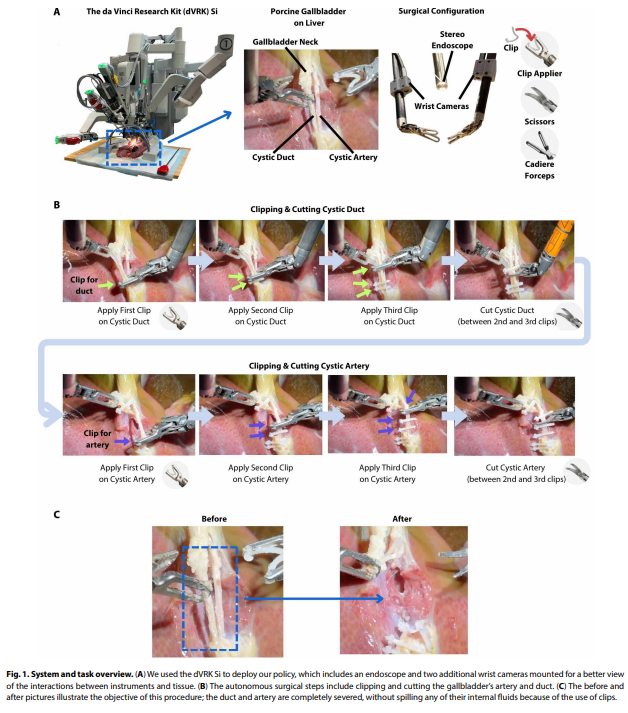
为啥选胆囊切除术当“考题”?讲究可大了。
首先,这手术够常见,数据好收集。其次,难度刚刚好——既不是简单到闭眼都能做,也不至于复杂到现阶段AI搞不定。
关键步骤是啥?夹闭和切割胆囊管(cystic duct)与胆囊动脉(cystic artery)。听起来简单,实际操作起来坑不少:血管直径差异巨大、血管间距离变化多端、表面还可能覆盖厚薄不一的结缔组织,最要命的是两只手得配合默契。
左手要抓住胆囊颈部,施加恰到好处的张力,给右手腾出操作空间。力度小了,夹钳挤不进去;力度大了,组织一撕就是大出血。
这种毫米级的精准控制,即便是经验老到的外科医生,也得全神贯注。
约翰霍普金斯团队的数据显示,SRT-H系统在8个测试案例中全部成功,平均耗时317秒(约5分17秒),期间平均自我纠正6次。
最精妙的操作来了:每个胆囊的解剖结构都不一样,颜色、纹理、血管走向各异,但机器人照样能准确识别、精准操作。
研究团队在论文中特别强调,他们刻意选择了形态各异的胆囊进行测试,就是要验证系统的泛化能力。结果证明,AI确实学会了”举一反三”。
▍能听懂指令的机器人:当自然语言成为手术指挥棒
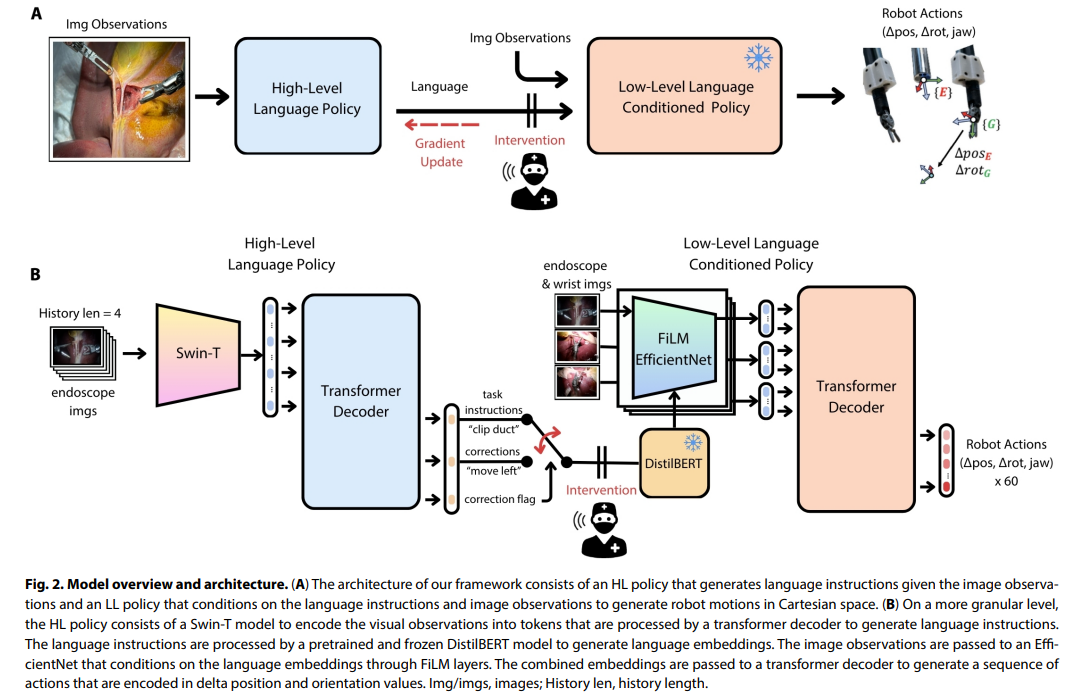
SRT-H最大的黑科技,是它独特的“分层大脑”架构。
简单说,就是把机器人的“脑子”分成两部分:高层策略(HL Policy)负责”想”,低层策略(LL Policy)负责”做”。
高层策略就像个经验丰富的主刀医生,每3秒钟看一眼手术进展,然后用自然语言下达指令。这些指令分两类:
任务指令:“抓取胆囊”、”夹闭左侧管道第一个夹子”、”切割右侧管道”等17种不同的手术任务指令。
纠正指令:“左臂向右移动”、”右臂向我移动”、”往上一点”等18种方向性纠正指令。
没错,就是这么接地气的大白话!
低层策略则像个听话的助手,接到指令后立马转化成精确的机械臂动作。它采用了一种叫“混合相对动作表示”(hybrid-relative action representation)的技术,专门对付dVRK系统的运动误差。
这种设计妙在哪?
首先,复杂手术被拆解成了一个个明确的子任务,每个动作都能说清楚、讲明白。出了问题也好排查——到底是”想”错了还是”做”错了,一目了然。
其次,为人机协作开了个好头。必要时,人类医生可以随时接管,用同样的语言指令指挥机器人。甚至可以语音输入:“往左一点”、”再夹紧些”,机器人立马心领神会。
为了训练这套系统,研究团队也是拼了。
两位经验丰富的演示者(非临床研究助理,由外科住院医师培训),在34个猪胆囊上疯狂练习,录制了超过16,000条轨迹,总时长约17小时。
这还不是简单的重复。他们特意演示了各种“翻车”场景:夹子没夹好、位置偏了、视野被挡……然后再演示如何补救。
更精彩的是数据收集技巧。团队用了特制的“练习夹子”——锁定功能被禁用,可以在同一个胆囊上反复练习,不会真的夹死。切割动作也是点到为止,剪刀就位但不真剪,后期再模拟完整动作。
这波操作,既保护了珍贵的实验材料,又收集到了海量高质量数据。
▍机器人的“自我修正”:让AI学会从错误中成长
最让人惊掉下巴的,是SRT-H的自我纠错能力。
研究团队故意给机器人“挖坑”,制造各种意外情况:夹子位置偏了、器械跑偏了、血液遮挡视野、组织意外滑动。
结果呢?机器人每次都能化险为夷。
比如发现夹子位置不对,高层策略会立即识别问题,发出纠正指令:“退回来,往左移2毫米再试”。如果视野被遮挡,系统会根据之前的图像记忆和当前的局部信息,推断出正确路径。
为了验证这种能力有多重要,团队做了一系列对比实验:
去掉纠正功能的版本,正常情况下还是100%成功,但遇到意外情况成功率骤降至66.7%;去掉腕部相机后,正常和异常情况成功率分别降至77.8%和50%;只用端到端策略的话,惨不忍睹,成功率仅33.3%。
数据不会说谎。分层架构+纠错机制,就是SRT-H的核心竞争力。
更有意思的是,团队还测试了数据量的影响。用33.3%、66.6%和100%的训练数据,成功率分别是66.7%、77.8%和100%。
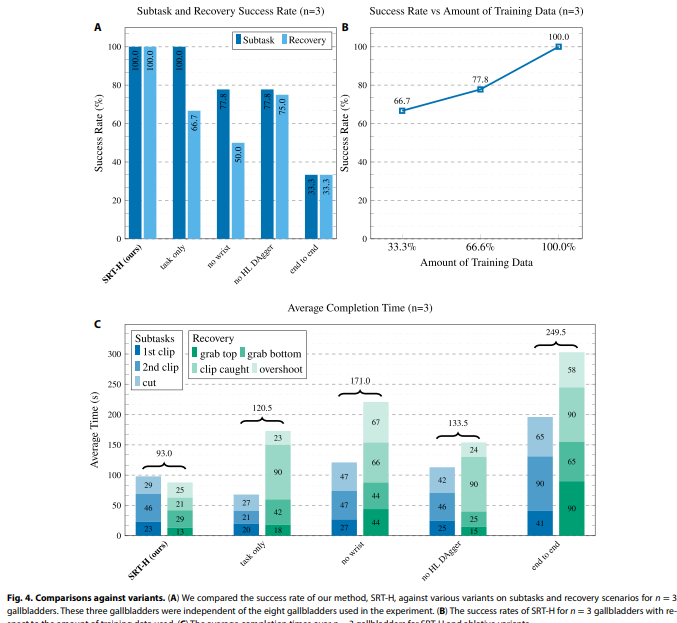
这说明啥?数据就是AI的”营养”,吃得越多长得越壮。
“最有意思的实验来了——他们让GPT-4o来当‘高层策略‘。结果嘛……翻车了。
这位‘全能选手’在手术规划上彻底懵了:直接跳过了’抓取胆囊’这个关键步骤,过早地发出夹闭动脉的指令,还在任务没完成时就错误地发出返回指令。
论文明确指出:GPT-4o无法引导机器人完成完整的胆囊切除手术,因为它无法发出正确的任务指令。
看来,通用AI再牛,到了专业领域还是得老老实实从头学起。术业有专攻,这个道理放在AI身上同样适用。
▍人机对决:当机器人遇上经验丰富的外科医生
压轴大戏来了——人机PK!
研究团队找来一位经验丰富的外科医生,在同一个胆囊上完成相同任务:放置第一个和第三个夹子,切割动脉。结果相当有意思:
速度:人类医生完胜。毕竟练了这么多年,肌肉记忆在那摆着。
精准度:机器人更胜一筹。轨迹更平滑,路径更短,动作更稳定。
稳定性:机器人的平均抖动(mean jerk)明显低于人类,数值低了一个数量级。
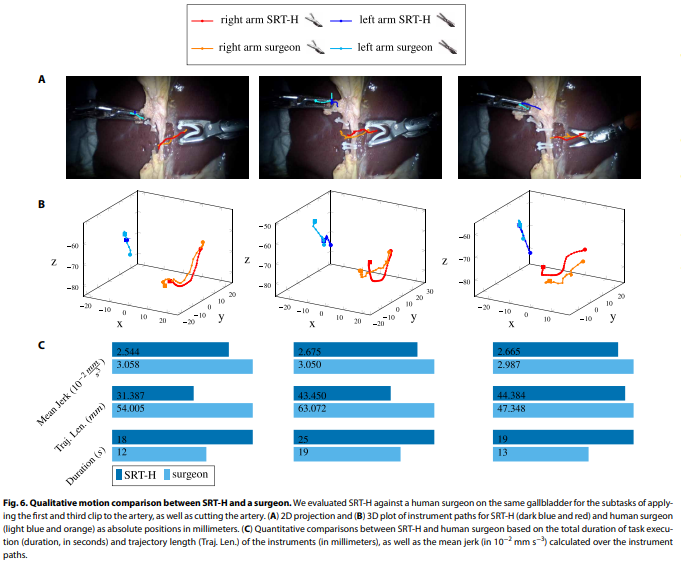
打个比方,如果说人类医生是个老司机,开车又快又稳;那机器人就像个谨慎的新手,虽然慢点,但每个动作都标准到位,从不手抖。
研究团队很谦虚,表示“不能说机器人就比人类医生强”。但数据摆在那,至少在某些维度上,AI已经能和人类顶尖高手掰掰手腕了。
▍从实验室到手术室:挑战与展望
当然,从实验室到真正的手术室,还有很长的路要走。
活体手术要面对的挑战可多了去了:呼吸导致的器官起伏、突发出血的应急处理、复杂的伦理和法律问题、患者和医生的接受度。
但技术进步的速度,往往超出我们的想象。
研究团队透露,他们的终极目标是打造“通用手术机器人”——通过学习不同手术的数据,让同一个系统掌握多种手术技能。
根据论文的自主性分级,SRT-H目前处于LoA IV级(高度自主),即能够独立做出医疗决策但仍需人类监督。距离LoA V级(完全自主)还有一步之遥。
想象一下,未来的手术室可能是这样的:
偏远山区的患者,也能享受顶级专家级别的手术治疗。外科医生从繁重的体力劳动中解放出来,专注于更有创造性的工作。在太空站、深海基地这些极端环境,自主手术机器人成为守护人类健康的守护神。
或许有一天,当你走进手术室,会看到人类医生和AI助手并肩作战。一个提供经验和创造力,一个贡献精准和稳定。
不过话说回来,如果机器人医生真的普及了,是不是该考虑给它们发个医师资格证?
毕竟人家也是经过“千锤百炼”才上岗的。而且还有个优势——理论上永远不会疲劳,永远保持最佳状态,永远不会因为手术前一晚没睡好而手抖。
唯一的问题是,手术成功后患者想送锦旗,是送给机器人呢,还是送给背后的科研人员?
要不,一人一面?
论文地址:
https://www.science.org/doi/10.1126/scirobotics.adt5254
(文:机器人大讲堂)