

据探索前沿科技边界,传递前沿科技成果的X-robot投稿,浙江大学湖州研究院金锡均教授研究团队与韩国高丽大学安春基教授研究团队强强联合,在伺服控制技术领域取得重大突破。双方共同开发的基于智能输出反馈的伺服速度控制技术,近日成功发表于国际权威学术期刊《IEEE/ASME Transactions on Mechatronics》(IEEE/ASME 机电一体化汇刊)2025年版,标志着中韩科研合作再结硕果。
《IEEE/ASME Transactions on Mechatronics》作为机械工程及控制系统领域的顶级学术期刊,按JCR标准位居全球前5%,其2024年影响因子(IF)高达7.3,在学术界具有极高的权威性与影响力。此次研究成果的成功发表,充分彰显了该技术的创新性与学术价值。
在论文中,研究团队突破传统控制模式,基于经典多环路控制结构,创造性地提出了一种无需电流传感器即可实现稳定速度跟踪的输出反馈系统。该技术融合多项前沿创新成果:采用低阶滤波器基速度观测器,摆脱对复杂模型信息的依赖,提升系统灵活性;设计自适应PD控制器,实现状态跟踪误差的自主稳定,增强系统稳定性;开发外环路智能化技术,在有效抑制峰值电流的同时,维持临界阻尼响应,显著优化系统动态性能。
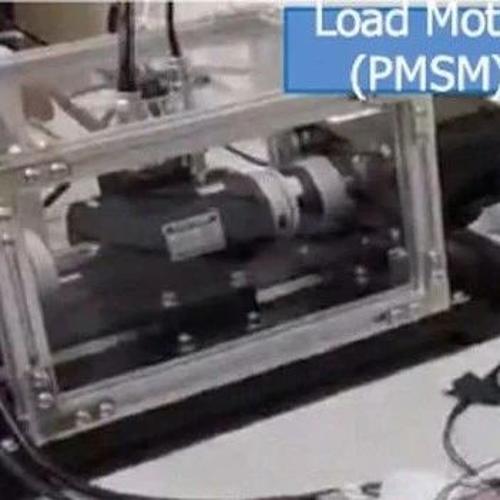
为验证技术的实际可行性与优越性,研究团队搭建了基于500W级 BLDC电机的硬件测试平台。经多轮严苛测试,在多种复杂负载条件下,该智能输出反馈系统与传统PI控制器相比优势显著。不仅实现低峰值电流运行,降低能耗,还具备快速跟踪响应能力,能迅速适应工况变化;同时,在传感器出现故障时依然保持良好性能,展现出强大的鲁棒性,充分证明其在工业实际应用中的高度实用性与巨大发展潜力。

多环路输出反馈系统框图
研究实验环境
值得一提的是,该技术还将于2025年秋季亮相IROS(IEEE/RSJ 智能机器人与系统国际会议)。作为智能机器人与系统领域全球规模最大的学术盛会之一,IROS汇聚了全球顶尖科研力量与创新成果。届时,这项中韩联合研发的技术将在国际舞台上进一步展示其魅力与价值。
本次研究的成功,离不开高丽大学安春基教授的深度参与。安春基教授在全球智能控制领域久负盛名,2019-2024年连续6年入选科睿唯安(Clarivate Analytics)评定的 “全球前 0.1% 高被引研究者(HCR)”,学术影响力非凡。同时,他还担任《IEEE Transactions on Neural Networks and Learning Systems》《IEEE Systems Journal》《IEEE Transactions on Systems, Man, and Cybernetics: Systems》等多个国际权威期刊的高级编辑(Senior Editor),其学术专业性与权威性备受认可。安春基教授在自动驾驶系统和机器人控制领域的顶尖造诣,为此次研究成果的深度与完成度提供了有力支撑。
金锡均教授在谈及此次成果时表示:“在产业升级与科研创新的进程中,无需复杂模型却能保障高控制性能的智能系统,已然成为产业界与科研领域亟需的核心技术。此次中韩合作研究,不仅实现了理论层面的突破,更在实际应用上取得了扎实成果,是双方协同效应的生动体现。未来,我们将持续深化国际合作,在尖端智能控制技术领域不断探
索,引领行业发展潮流。”
此次中韩联合研究成果,在理论完善度与实际应用价值上实现了双突破。随着技术的进一步成熟,预计其将在自主移动机器人、智能制造等尖端产业领域应用。
▍关于X-robot
X-robot是中关村机器人产业创新中心与机器人大讲堂联手打造的权威性信息发布品牌专栏,集前沿探索、产业研究、知识普及于一体,致力于积极推动新质生产力的生成与发展,助力我国乃至全球机器人行业的蓬勃繁荣。X-robot立足国际化视野,通过全方位、多角度的挖掘与追踪,生动展现机器人前沿技术与尖端成果,为学术界、产业界及公众提供一个洞见未来、共享科技的重要窗口。
来源:浙江大学湖州研究院
(文:机器人大讲堂)