
RTK-GNSS/INS定位产品,融合了实时动态差分定位技术(RTK)、全球导航卫星系统(GNSS)和惯性导航系统(INS)的多重优势,能够在各种复杂环境中提供持续、高精度定位服务,被广泛应用于机器人等多个领域,以满足其对精准定位的需求。
然而,当前市面上的绝大多数RTK-GNSS/INS定位产品在使用过程中普遍存在繁琐且耗时的弊端。定位设备启动后,用户需先花费一定时间前往户外开阔区域接收差分信号,并等待改正数据状态切换至RTK Fix。随后,还需在RTK初始化完成后对惯性测量单元(IMU)进行校准,定位设备方能正常运转,输出自主移动机器人的准确位置与姿态信息。
▲视频展示了视觉增强RTK 2高精度全局定位传感器按照常规模式在启动之后到开阔场景接收RTK Fix信号进行初始化。大图为Web Interface网络界面实时录屏,左下角小窗为测试人员实拍。
需要特别指出的是,每次设备关机重启之后,都必须重新进行室外初始化操作,这无疑给其应用带来了极大的不便。对于由多辆自主移动智能机器人组成的舰队而言,其日常需多次外出执行任务。每当机器人结束作业返回室内仓库待命,再次出勤作业时,均需对搭载在每台智能机器人上的定位设备进行重新初始化。这一繁琐流程不仅耗时费力,还大大降低了工作效率,给实际应用带来了诸多困扰。
▍创新推出室内启动功能,彻底破解室外初始化难题
针对当前RTK-GNSS/INS定位产品室外初始化给用户带来的诸多困扰,Fixposition非普导航科技凭借深入的行业洞察和持续的技术创新,对产品进行了全面优化升级,并成功推出了室内启动功能,彻底打破了RTK-GNSS/INS定位产品的传统使用模式限制。
据机器人大讲堂了解,Fixposition非普导航科技推出的室内启动功能让定位传感器不再依赖于室外固定解信号进行初始化。用户只需在室内启动传感器内部的融合引擎,通过调用系统中预先保存的位置、姿态、方向等关键数据,即可轻松完成应用设备的初始化定位。
同时,得益于这一创新的室内启动功能,机器人在完成首次配置后,便能在后续的工作中实现全天候、随时随地的初始化。整个过程无需依赖SLAM建图,配置执行更加轻量化,极大地简化了机器人的启动流程,提升了使用便捷性。
此外,室内定位功能还能为其他定位技术提供有力辅助。例如,在特征稀少的室内环境中,SLAM技术的特征提取和匹配难度较大。而带有室内启动功能的视觉增强RTK 2,则能以其室内初始化定位功能,弥补SLAM技术从室内到室外切换时的短暂缺位,为自主移动机器人提供全局定位支持。
▲该视频展示了室内启动操作的完整流程,画面为Web Interface网络界面录屏。
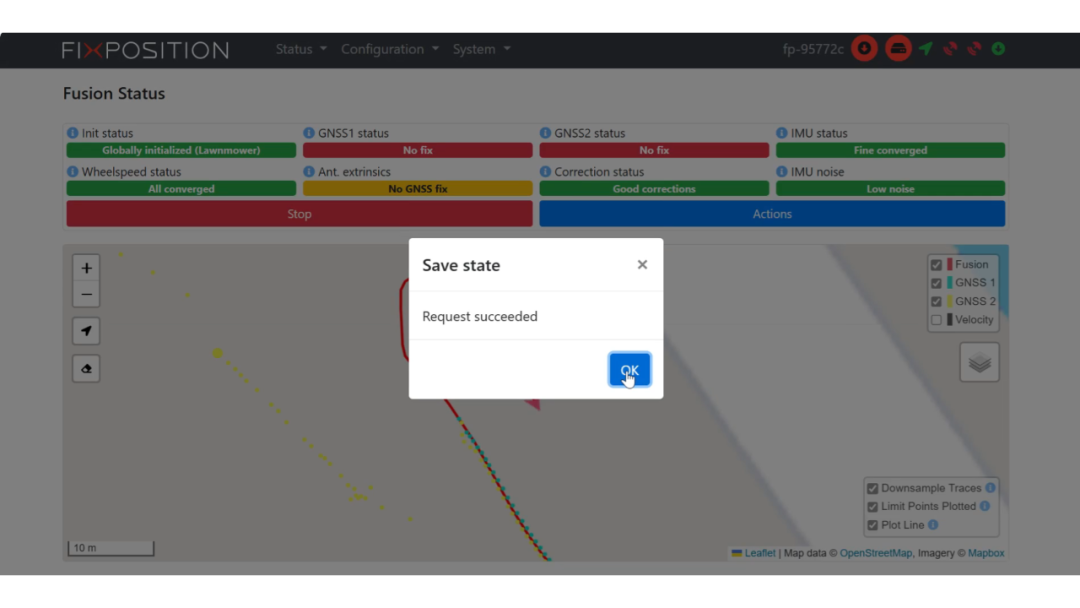
通过上面的视频,我们可以清晰地看到视觉增强RTK 2定位传感器提供的融合定位输出(红色轨迹所示),以及RTK-GNSS定位输出(黄色与绿色点状轨迹)。视频左侧小窗口展示了整个测试过程的实时录像。测试车辆从室外驶入室内地下车库并靠边停定后,测试人员在Web Interface网络界面中进行了位置保存操作。保存成功后,视觉增强RTK 2关机,等待一定时间后再次重启定位传感器。
确认Fusion Engine融合引擎启动后,测试人员开始进行位置载入操作。通过调用先前保存的位置、姿态、方向等数据,在室内完成了初始化,且得到的位置输出与先前保存的位置以及实际情况完全吻合。室内启动成功后,测试车辆从室内驶向室外,在室内外切换时实现了无缝衔接,融合定位输出未产生任何跳变。
▍功能全面升级,价格更亲民,致力打造超高性价比产品
Fixposition非普导航科技,自2017年8月诞生之日起,便依托苏黎世联邦理工学院的强大科研背景,成为欧洲航天局瑞士区商业孵化项目的杰出成员。其团队汇聚了来自苏黎世联邦理工的顶尖科技创新人才和定位导航领军企业的资深工程师与行业专家,共同致力于技术创新与发展。

作为一家面向农业、环卫,割草机器人与车辆生产商提供全场景全局高精度定位的传感器和方案供应商,Fixposition非普导航科技不仅致力于将全场景高精度全局定位技术广泛赋能于各行各业的自主移动智能设备,更始终以打造超高性价比产品为目标,不断追求技术突破与成本优化。通过提供更实惠的价格、更便捷优质的服务,Fixposition非普导航科技不断提升产品的性价比,以更好地推动行业进步,为客户创造更大的价值。
据Fixposition非普导航科技透露,其视觉增强RTK 2定位传感器现已完成固件版本升级,自2.102.1版本起,该系列产品将正式新增室内启动功能。但在功能实现全面跃升的同时,Fixposition非普导航科技将视觉增强RTK 2传感器价格进行了下调,确保客户能够以更实惠的价格享受到更先进的技术产品,真正实现性价比的飞跃。
如需深入了解室内启动功能,或咨询视觉增强RTK 2的订购详情,可扫描下方海报中的二维码添加联系人,或发送邮件derek.wang@fixposition.com进行沟通。

▍室内启动功能操作指南
使用室内启动功能前需要在Web Interface网络界面进行一些简单操作,同样的功能也能通过API调用。
1)储存信息
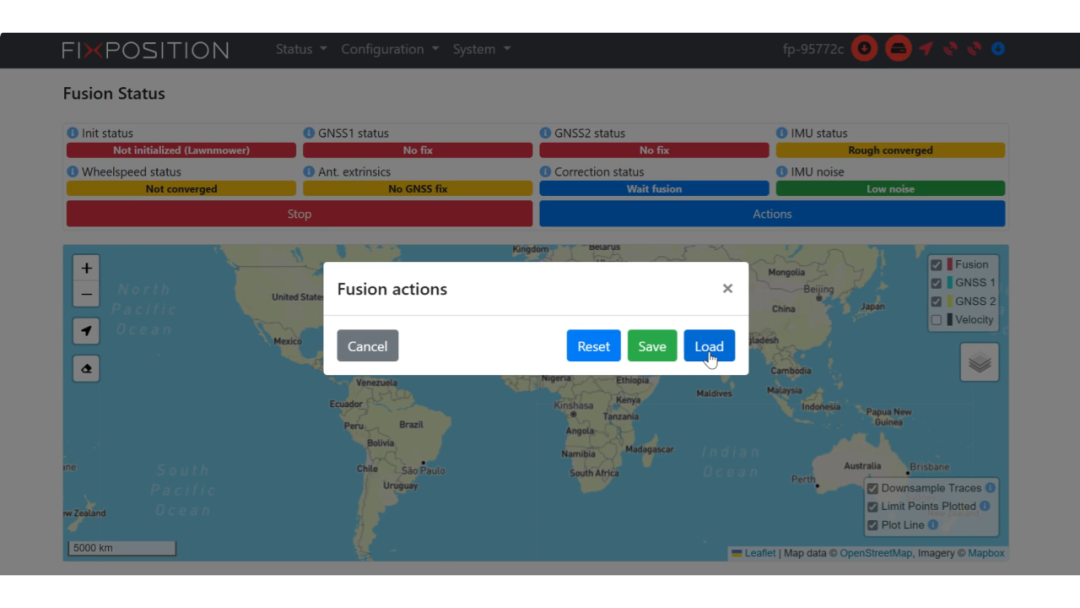
首先需要确保Fusion Engine处于开启状态。此时,在Web Interface网络界面的’Status > Fusion’页面中会显示一个’Action’按键,点击按键。
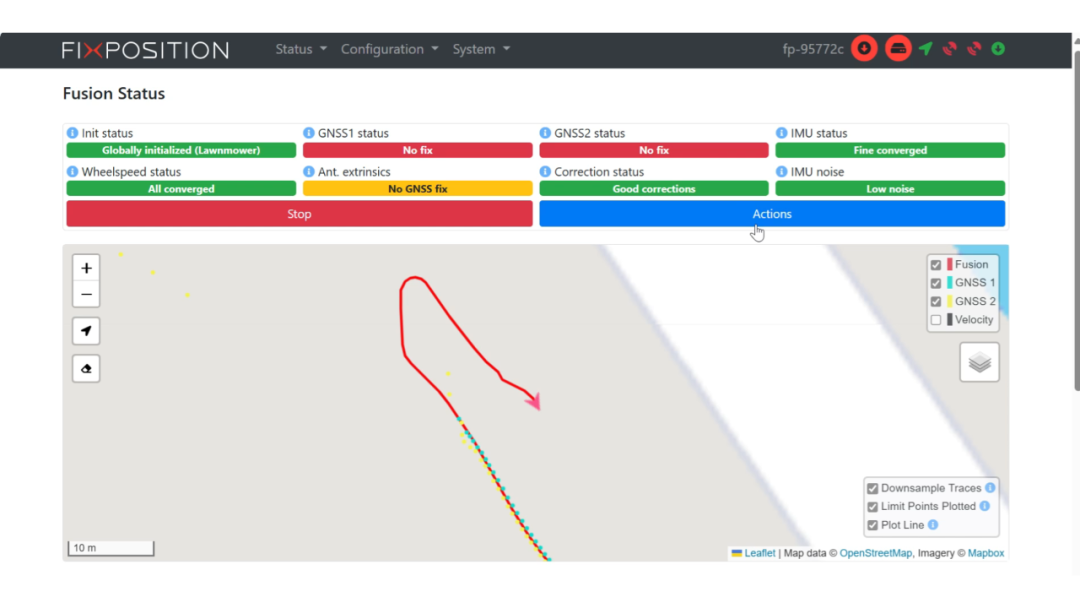
点击之后,出现一个弹窗,有三个选项可供选择,分别是’Reset’、’Save’以及’Load’。

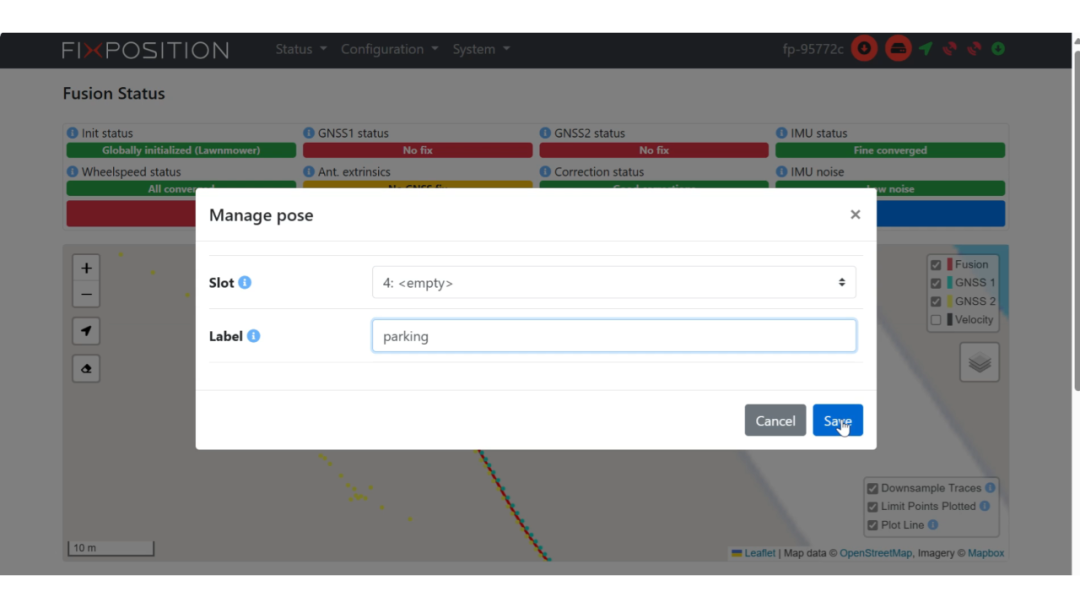
点击’Save’按键,保存当前融合位置以及内部状态信息。最多可以保存并备注5个位置。备注在20个字符以内,不能使用空格和特殊字符(可以使用破折号’-‘及下划线’_’)。
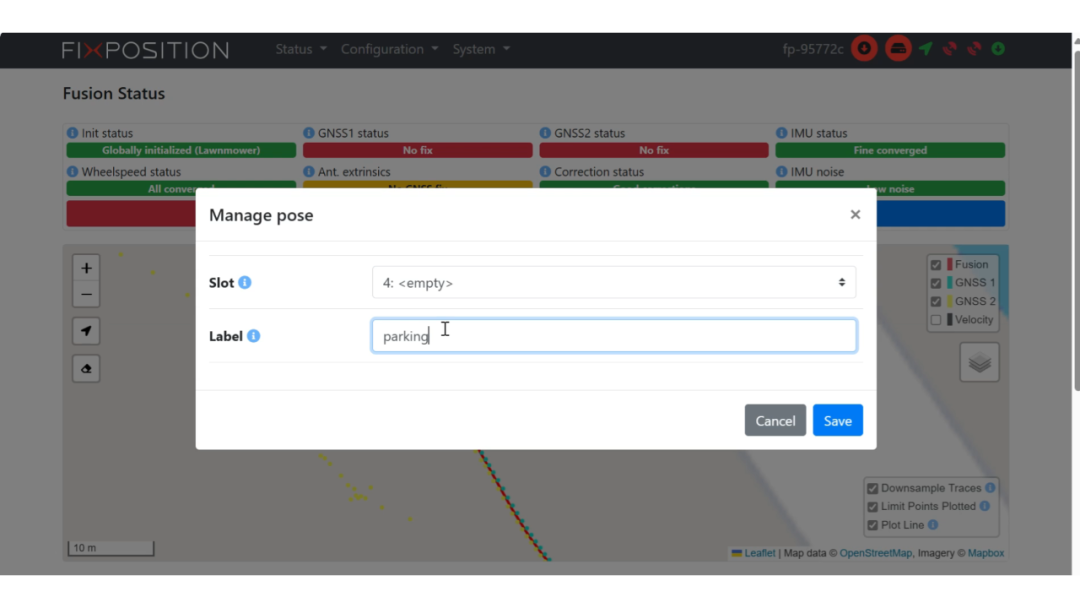
设置完成后,点击’Save’按键,并在随后的弹窗中点击’Yes’,确认保存。
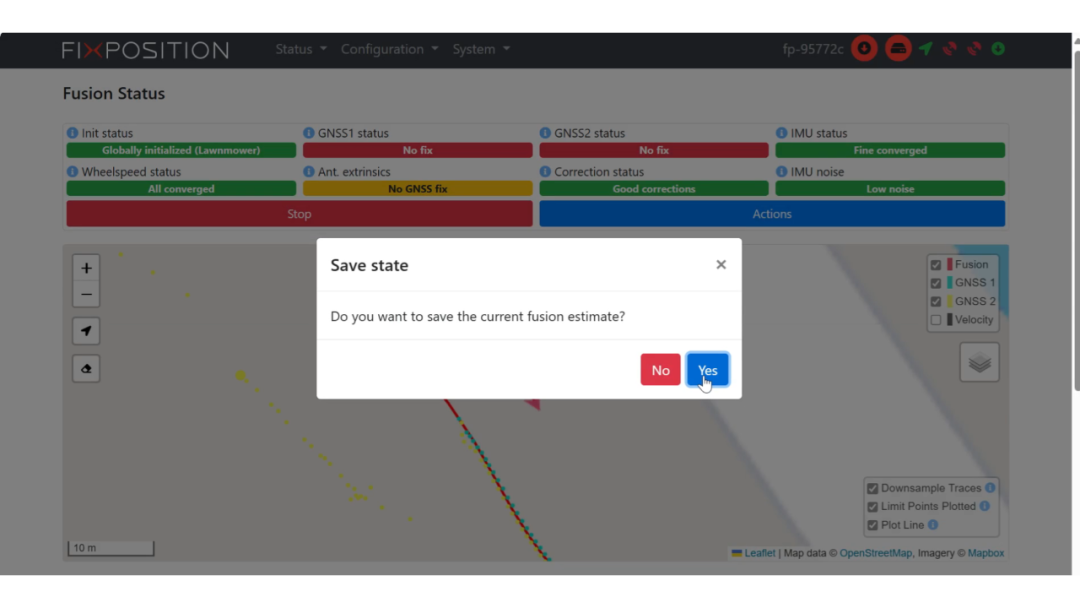
若当前位姿信息保存成功,页面将会出现提示。
2)载入信息
确保Fusion已完全初始化。当前信息保存成功后,等待几秒,然后才能关闭视觉增强RTK 2定位传感器或停止Fusion融合引擎。
Fusion融合再次启动后,点击’Load’按键,通过载入适才保存的位置信息和状态对定位传感器进行初始化。
3)温馨提示
-
储存或载入Fusion状态时,务必确保视觉增强RTK 2定位传感器保持静止状态
-
务必确保自主移动设备在载入信息时的位置与方向和储存信息时保持一致
-
利用室内启动功能,Fusion融合引擎在室内即可初始化,能够获取协方差估算和融合输出,但IMU收敛状态显示为’warmstarted’或’rough converged’;为了保持高精度全局定位的稳定性和可靠性,建议在室内使用室内启动后尽快让自主移动机器人行驶至室外开阔场景,通过获取RTK固定解提升IMU收敛质量,收敛完成后再驶入GNSS拒止场景中进行测试等操作。
-
在载入位置和状态信息之前,请务必确保视觉增强RTK 2启动了主动时间同步(互联网或GNSS)
(文:机器人大讲堂)