
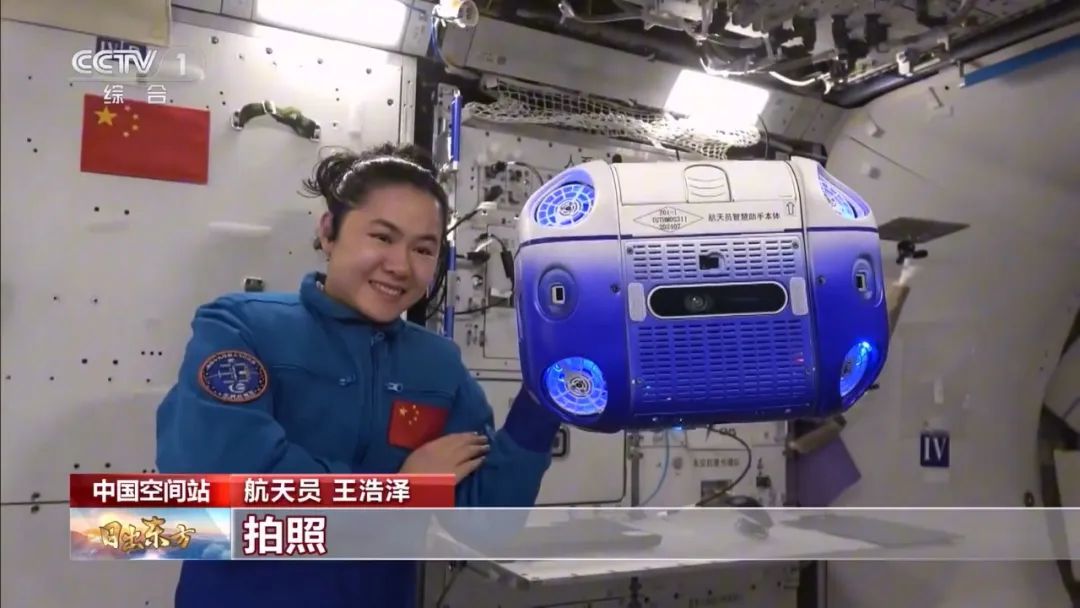
2025年1月1日,随着中国空间站的又一次成功对接,一个特殊的“乘客”引起了全球的关注。它来自哈尔滨工业大学(以下简称“哈工大”)张立宪教授团队研发的智能机器人“小航”。同时也是中国首台空间站舱内智能飞行机器人。
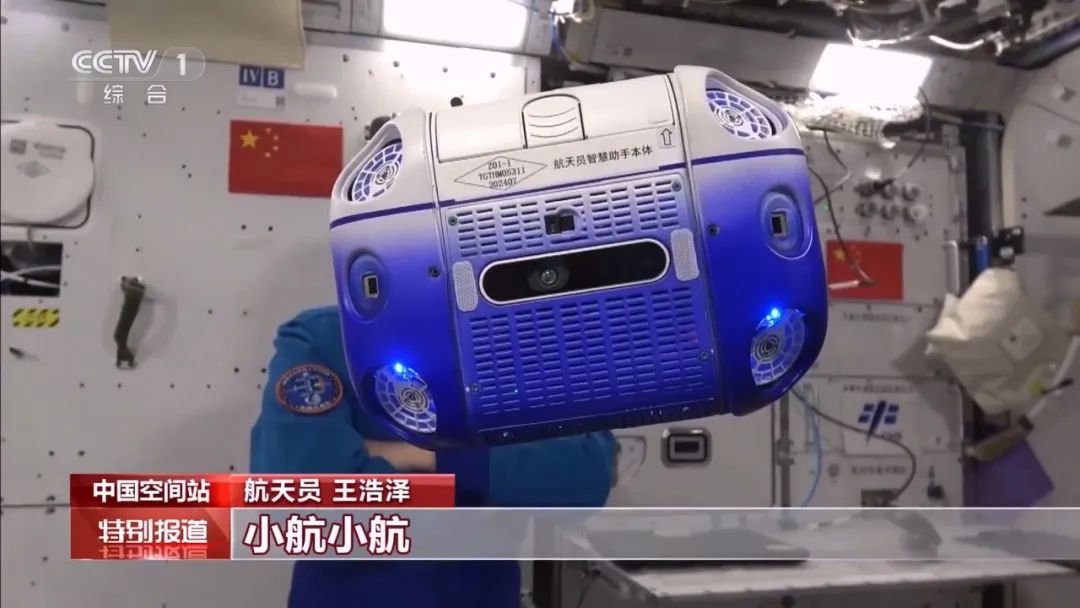
张立宪教授团队表示,“小航”机器人是一款功能强大、智能化的空间站辅助工作机器人,能够为航天员提供语音交互、仓内巡检、物资整理、任务记录、数据分析以及情感陪伴服务,提高空间站的工作效率,同时促进科学实验的精准性和有效性。
▍张立宪教授牵头 “小航”机器人由哈工大多学科交叉科研团队打造
大讲堂获悉,“小航”智能机器人的研发经历了数年之久,并且克服了众多棘手的技术问题。该机器人由哈尔滨工业大学的多学科交叉科研团队打造,哈尔滨工业大学航天学院教授、博士生导师张立宪教授为项目带头人。

此前,张立宪教授团队在智能控制、无人系统研究方向上主持了包括国家自然科学基金优秀青年科学基金项目、国防科工局国防基础科研计划项目、黑龙江省杰出青年科学基金等在内的30余项国家及省部级基金项目,并取得了卓越的研究成果。团队在《Automatica》、《IEEE Transactions on Automatic Control》等国际权威期刊上发表了大量高水平学术论文。

团队主要成员来自哈工大不同专业的研究生,该团队在智能控制、无人系统、机器人技术等领域具有深厚的理论研究基础以及丰富的实战经验。并致力于解决国家重大工程中的关键技术难题,已取得了多项具有国际影响力的科研成果。
张立宪教授在接受媒体采访时表示:“小航的研发过程充满了挑战,但我们始终坚信,智能化和自动化是航天技术发展的未来方向。我们希望通过小航的研发,为中国的航天事业贡献一份力量。”
团队在研发过程中,充分考虑了空间站环境的特殊性和航天员的需求。团队研究人员表示,在太空环境中,机器人不仅要具备高度的可靠性和稳定性,还要能够适应航天员的工作和生活习惯,成为航天员的得力助手。因此,团队在机器人的设计、制造和测试过程中,都严格按照航天标准进行,确保“小航”能够在空间站中发挥出最大的作用。
▍“小航”机器人变身航天员24小时智慧助手
作为航天员的贴身智慧助手,“小航”具备移动拍照功能。航天员可以通过语音指令,控制“小航”在空间站内移动并拍摄照片,来记录实验过程、设备状态等重要信息,是科研工作的得力助手。在“小航”没上岗之前,此前的拍照工作通常由两位航天员协作完成。
作为一款能够行动自如的智能机器人,“小航”还具备舱内巡检功能,能够穿梭在空间站内,并对空间站进行定期巡检,实时监控整个空间站的状态。例如,在舱内某个角落发生设备故障时,“小航”能够第一时间定位并拍摄故障部位,为地面团队和航天员提供参考。
此外,“小航”还能通过搭载的视觉单元,有效管理空间站内的物资。在太空环境中,物资的管理是一项非常重要的工作,这是长期太空任务的核心行动。随着任务时间的增加,任务种类的增多,空间站上所需的物资种类和数量日益繁多,管理难度随之提升。“小航”能够根据物资的编号和位置记录,迅速定位并协助航天员完成调取或存储任务。这不仅提高了物资管理的效率,也减少了人为错误的发生。

值得一提的是,“小航”还能进行任务记录和数据分析工作,它不仅能完成实时任务,还能承担任务记录和数据分析的职责。例如,在设备测试或科学实验过程中,“小航”可以自动记录操作细节和实验结果,为后续分析提供精准数据支持。这个功能不仅可以帮上航天员,还可以为地面上等待实验结果的科学家们提供重大帮助。

除了上述功能外,“小航”还可以客串临时心理医生,能够在航天员需要的时候,提供情感互动服务,为航天员提供心理支持,缓解航天员在太空中的孤独和压力。
▍融合机器学习与深度学习技术 通过对抗网络提升图像识别能力
在核心技术方面,“小航”机器人融入了语音指控功能。航天员无需使用遥控器,通过语音指令即可控制“小航”执行各项任务。
值得一提的是“小航”结合了人工智能算法。融合了机器学习与深度学习技术,使其能够理解和响应复杂的语音指令。利用自然语言处理技术,‘小航’可以与航天员进行高效的沟通,确保任务指令的准确执行。
研究团队表示,“小航”首次采用生成对抗网络技术,该技术能够大幅提升‘小航’在图像识别和处理能力方面的表现,尤其是在进行舱内巡检时,可以通过高分辨率影像快速识别出设备异常。这使得航天员得以专注于更为复杂的科学实验,而非琐碎的设备管理。
硬件设计方面,“小航”在机身周围配置了多枚感知高清摄像头,支持360度监控,确保在进行巡视任务时对周围环境的全覆盖观察。在数据处理方面,“小航”内置高效计算单元,拥有数据快速处理能力,确保“小航”在面临多任务时依然能够保持理想的响应速率。
▍结语与未来:
机器人进入外太空探索早已不是什么新鲜事。早在2011年,NASA就已向国际空间站发射Robonaut 2太空机器人,但当时的技术能力有限,Robonaut 2大部分时间都是通过地面的远程操控执行按开关和清洁扶手的训练,缺乏一定的自主决策能力。此后的研究一直持续进行,直到2018年2月Robonaut才被打包送回地球。

而近几年,NASA与得克萨斯州的Apptronik公司携手合作,打造的“Apollo”人形机器人将在未来的载人登月或火星任务中,从事卸载登月舱、搬运物资,甚至作为航天员的“化身”,在月球或火星表面执行各种复杂任务,这无疑将大大提高任务的安全性和效率。
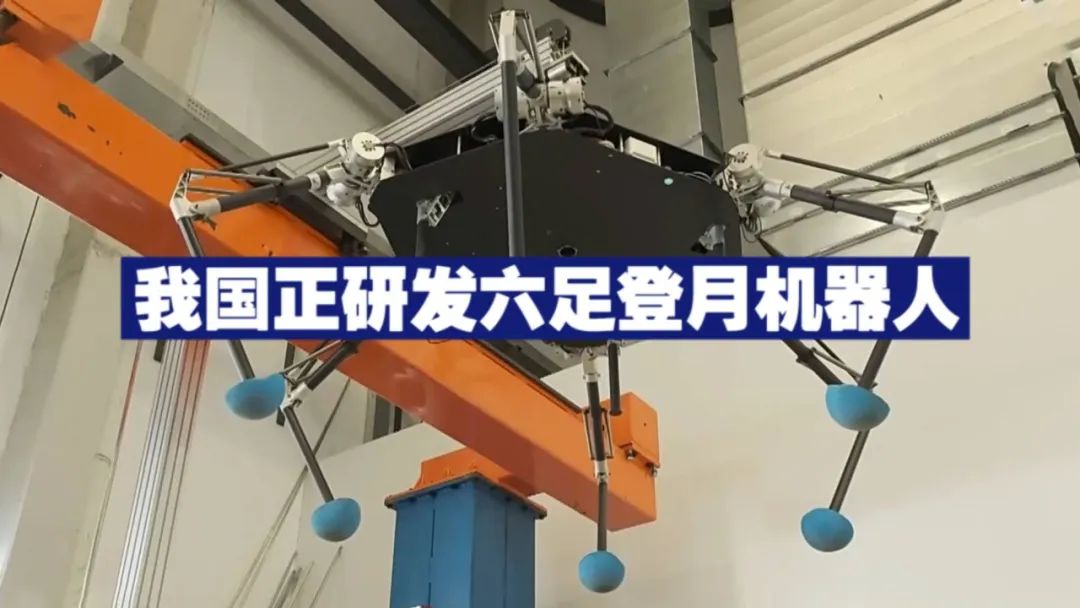
可以说在未来的外太空探索过程中,机器人或类人机器人将具备更大的想象空间,目前中国也在积极探索部署在外太空的机器人技术,如上海交通大学高峰团队打造的六足登月机器人,具备更高的稳定性和灵活性,尤其适合在月球等复杂地形中进行探索。而计划于2028年发射的嫦娥八号,或将携带一款能够为月球设备提供充电支持的智能机器人,目前具体信息仍在保密阶段。
可以预见的是,未来外太空一定是机器人的主战场,能够帮助我们建立太空基地、开采太空资源、进行深空探测,进入人类难以抵达的区域,执行精细的操作和实验。它们的存在,将极大地拓展人类的太空活动范围,提高探索的效率和安全性。而哈工大“小航”更像是《星际穿越》当中的TARS,往往在关键时刻,能否发挥它独特的价值。
(文:机器人大讲堂)