
鱼类通过其复杂的肌肉系统控制身体形状,展现出高超的游动能力,这一机制激发了科研界对自然鱼类游动机制的深入探索,并催生了水下仿生机器鱼这一研究方向。
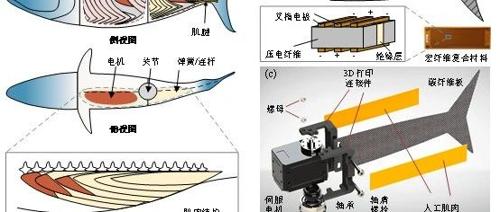
在自然界众多鱼类中,金枪鱼以其高速且持久的水下游动能力而著称,为科研人员提供了宝贵的研究灵感。金枪鱼的尾鳍由独特的“W”形肌节驱动,每个肌节均包含耐力型的红肌和爆发型的白肌。与淡水鱼相比,金枪鱼将红肌主要集中于身体中部深处,并通过较长的白肌将力量有效传递至尾部。在远距离巡航游动过程中,金枪鱼能够利用这些肌节以及尾柄肌腱结构动态地调整身体柔顺性,从而优化推力传递,提升游动速度与推进效率,保持其高速且持久的水下推进能力。
受金枪鱼这一生物特性的启发,水下机器人领域的研究人员尝试开发了多种基于钢丝、弹簧的刚度调节机构,以模拟金枪鱼的动态调节能力。但这些方法在实际应用中往往因结构复杂性高、可靠性相对较低或调节能力有限等缺陷,难以在复杂的流体环境中有效部署并达到预期的效果。因此,如何设计一种结构简洁、运行可靠且具备快速响应能力的刚度调节机构,仍然是当前机器鱼研究领域面临的一项重大技术挑战。
▍人工肌肉动态控制形变,实现仿生鱼尾刚度可调节
针对以上问题,中国科学院自动化研究所吴正兴研究员、北京科技大学刘志杰教授和北京大学喻俊志教授团队展开了深入研究。基于金枪鱼的肌肉功能结构和生物调节机制,研究团队成功将人工肌肉与电机驱动技术相融合,成功开发出了一种高效的仿生动态刚度调节系统,并提出了一款具备实时形变调节能力的新型柔性鱼尾。
为了进一步检验所提出系统和柔性鱼尾的有效性,研究团队利用六轴力传感装置对鱼尾的推进性能进行了系统评估,并在自主游动的机器鱼平台上进行了实验验证。实验结果表明,该系统显著提升了推进性能,实现了多频率下15%至203%的推力增益,同时在游速方面也实现了-42%至37%的大范围调节。
近期,这一研究成果的相关论文已以“Deformation Control and Thrust Analysis of a Flexible Fishtail With Muscle-Like Actuation”为题,发表在机器人领域的顶级期刊IEEE Transactions on Robotics上。该论文的第一作者由中国科学院自动化研究所的博士生顾俊文与王健副研究员共同担任,通讯作者为吴正兴研究员。论文的共同作者还包括北京科技大学的刘志杰教授、中国科学院自动化研究所的谭民研究员以及北京大学的喻俊志教授。中国科学院自动化研究所为该论文的第一完成单位。
▍仿生柔性鱼尾如何构建?构造设计与控制框架详解
在仿生设计方面,研究团队模仿了金枪鱼红肌的前向聚集机理,利用伺服电机作为核心驱动装置,为新型柔性鱼尾提供充足的推进力。鱼尾的柔性部分则由两块紧密附着在碳纤维板上的人工肌肉组成,这一设计使得其能够灵活调节形变,与电机配合实现高效驱动效果。为了确保设计的科学性和准确性,研究团队基于哈密顿原理,精心构建了鱼尾的动力学模型,其中鱼尾柔性部分被视作非均匀欧拉-伯努利梁。同时,他们还运用了细长体理论进行流体动力学分析,为鱼尾的控制提供了坚实的理论基础。
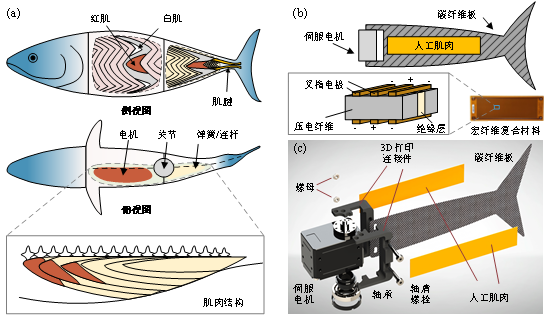
仿生设计理念及柔性鱼尾示意图
为了模仿金枪鱼白肌的推力传递机理,研究团队选用了宏纤维复合材料(MFC)作为人工肌肉。这种材料基于逆压电效应,具备强大的驱动力和快速响应特性,能够精确控制碳纤维鱼尾的形变,实现关节推力的高效传递。
为了全面、准确地估算鱼尾状态,研究团队也创新性地开发了一个偏微分方程(PDE)观测器。与传统方法相比,该PDE观测器在忽略高阶模态的情况下,能够有效避免溢出问题,确保了鱼尾形变的快速、精确估计。
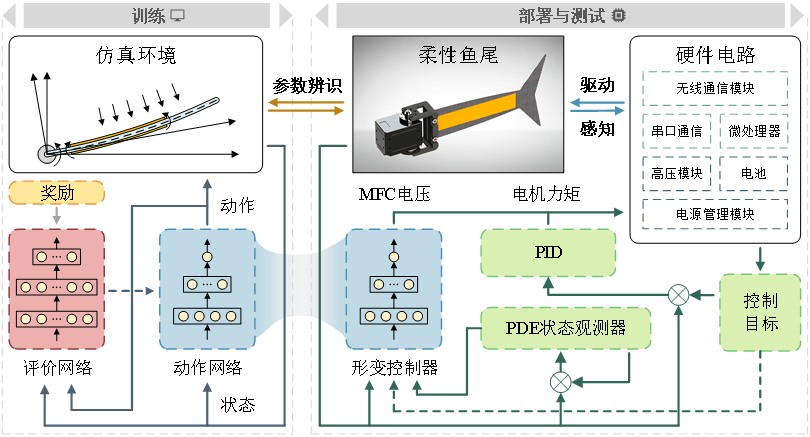
基于强化学习的动态形变控制框架
此外,为了应对柔性鱼尾在流体环境中的控制挑战,研究团队还构建了一个基于偏微分方程(PDE)状态观测器反馈的强化学习控制框架。在该框架中,电机部分采用了比例积分微分(PID)控制器,而人工肌肉则采用了基于深度强化学习(DRL)的控制策略,采用深度确定性策略梯度(DDPG)算法对人工肌肉控制器进行训练。通过精细调控关节运动下的柔性体形变,研究团队成功为新型柔性鱼尾赋予了连续可调的动态刚度特性。
▍控制框架有效性验证,系列仿真与实验测试齐行!
为了验证所提出的控制框架的切实可行性,研究团队开展了一系列细致的仿真测试,并将整个控制框架在嵌入式平台上进行部署,通过实际的水下试验,对其有效性进行了全面的验证。
-
形变控制框架有效性验证
为了验证控制框架的有效性,研究团队在仿真环境中评估了观测器的性能,并确定了合适的观测器增益参数。仿真结果显示,观测器能够迅速且准确地估计鱼尾的状态,估计误差接近零。此外,研究团队还探索了观测器在周期输入下的性能,结果表明观测器对形变趋势和幅度的预测能力良好。
进一步,团队还通过实验验证了观测器的准确性和控制器的性能。实验结果显示,观测器能够有效地估计鱼尾的全状态,包括侧向位移和偏转。同时,控制器也表现出了良好的跟踪性能,能够准确地跟踪目标波形。
-
柔性鱼尾推力分析
为了验证所提出鱼尾和控制框架的性能,研究团队进行了大量推力实验。使用六轴力和扭矩传感器测量了鱼尾在不同驱动模式下的前向实时推力,包括人工肌肉处于被动状态的基准模式,以及动态形变控制模式。实验结果显示,与基线场景相比,在适当的控制模式下,鱼尾的平均推力显著提升,最大增益达到203%。此外,分析还表明形变控制通过增加周期内正推力并减少负推力来增强平均推力。
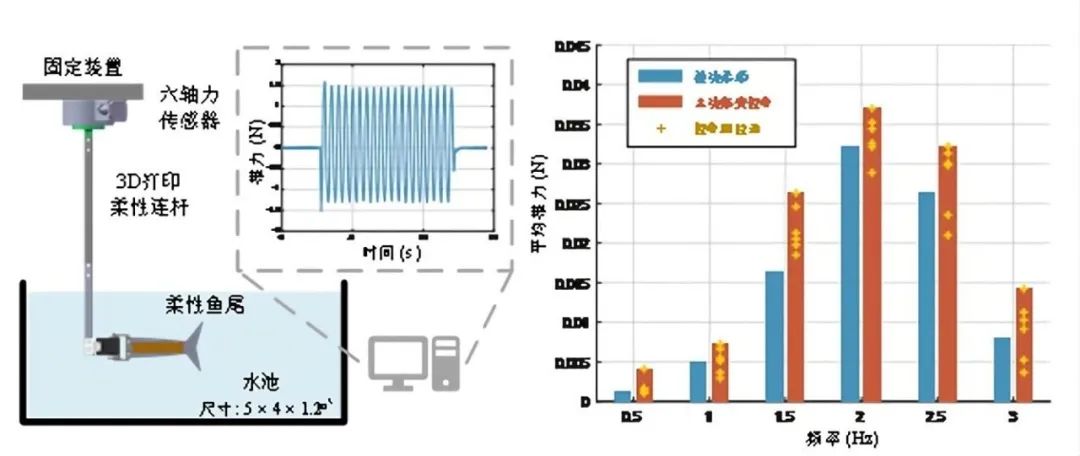
不同控制模式下的鱼尾平均推力实验
除了平均推力外,研究团队还分析了峰峰值推力和正负推力差与驱动相位的关系。结果表明,平均推力与正负推力差的变化趋势一致,而峰峰值推力与平均推力之间的相关性较弱。这些结果验证了平均推力的计算和趋势的可靠性,并表明所提出控制框架在控制性能方面的稳定性。
-
无缆机器鱼的自主游动
基于推力分析结果,研究团队进一步将鱼尾和硬件电路模块组装成无缆机器鱼,并在真实水下环境中进行了自主游动实验。实验结果显示,与人工肌肉保持松弛的被动柔顺情况相比,当鱼尾柔性部分与关节同相振荡时,所有频率下的游动速度均增加;相反,当鱼尾形变相位与关节振荡相反时,游动速度降低。在适当的动态控制模式下,可使游动速度最高提升37%,平均提升25%。
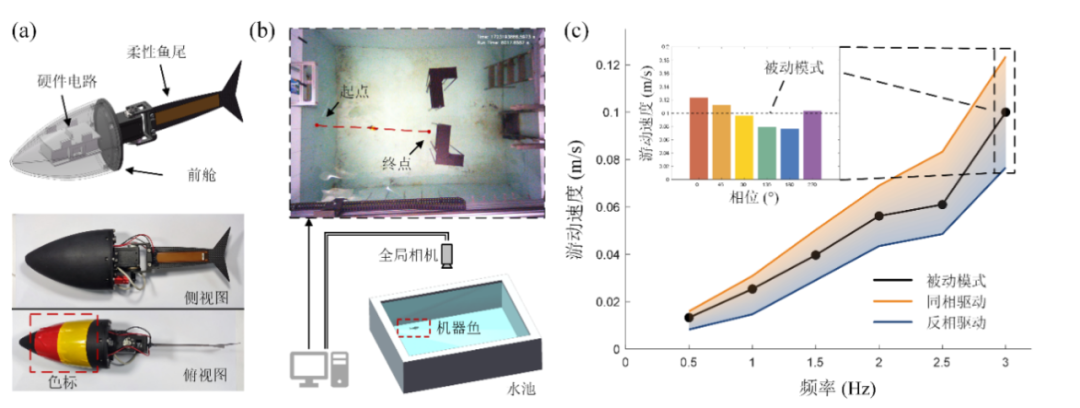
无缆机器鱼及自主游动实验
以上实验结果全面揭示了人工肌肉在机器人运动优化中的巨大潜力,同时为刚柔耦合结构设计、流体环境下的高维非线性控制等复杂领域提供了创新性的解决方案,尤为重要的是,为仿生水下机器人的刚度调节问题提供了全新的思考方向和思路。
参考文章
https://ieeexplore.ieee.org/abstract/document/10758228
(文:机器人大讲堂)