Agentic AI 应用日渐增多,OpenAI Agent【Tasks】已来,新域名operator.chatgpt.com也已准备就绪。
未来,正朝着多个基于LLM的智能体的方向发展,共同感知、学习、推理和行动,以协作为核心,使得一群 Agent 集体地协调和解决大规模的复杂任务。
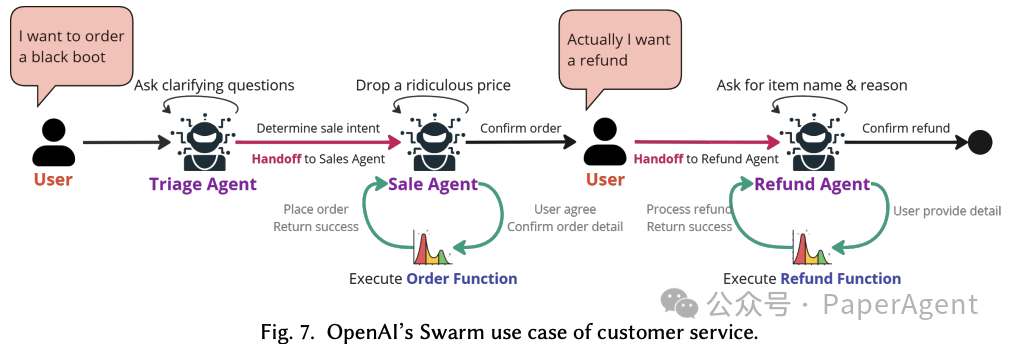
OpenAI的Multi-Agent Swarm在客户服务中用例
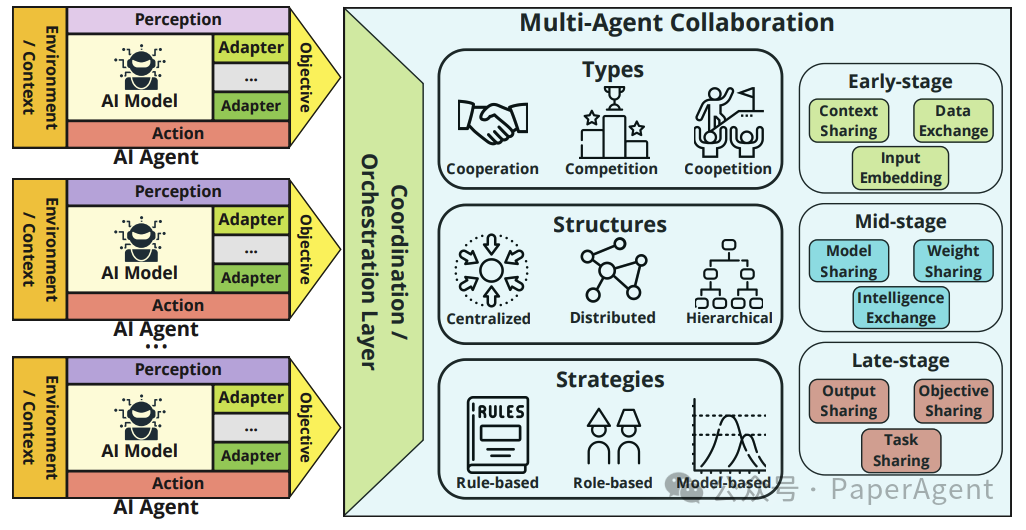
为了指导未来Multi-Agent系统协作方面的研究引入了一个可扩展的框架,基于关键维度来表征协作机制:
-
参与者(Actors):涉及的智能体。
-
类型(Types):合作、竞争或合作竞争。
-
结构(Structures):点对点、集中式或分布式。
-
策略(Strategies):基于角色或基于模型。
-
协调机制(Coordination Mechanisms):智能体之间的协调和协作。
基于LLM的多智能体协作系统的框架。每个智能体由一个语言模型m作为神经处理器、当前目标o、环境e、输入感知x和相应的输出/动作y组成。框架的核心关注点是协作渠道C,这些渠道促进智能体之间的协调和编排。这些渠道由其参与者(涉及的智能体)、类型、结构和策略定义。框架具有灵活性,能够容纳先前的方法,并使在统一结构下分析各种Multi-Agent成为可能。
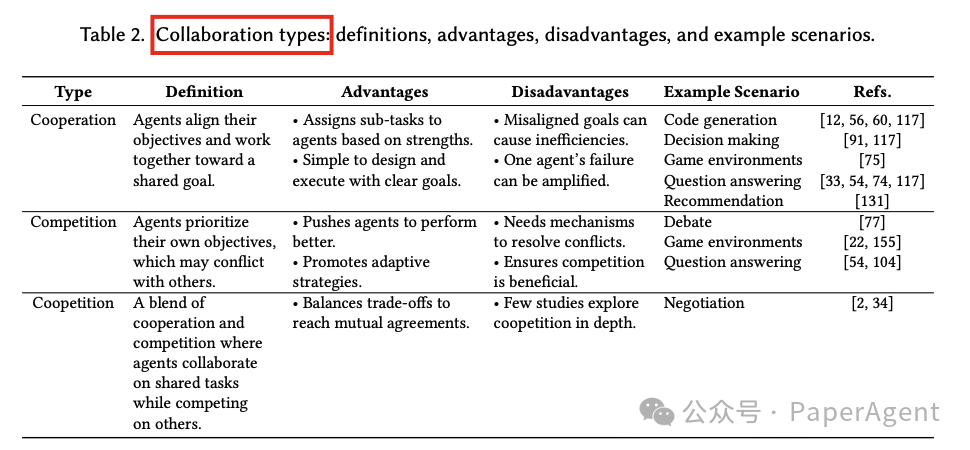
协作类型
在LLM基础的Multi-Agent系统中,通常需要超越单一协作类型(如竞争或合作)的复杂互动。不同的智能体可能参与不同的协作渠道,每个渠道都有不同的互动类型,共同实现整体系统目标。

合作发生在智能体将个人目标与集体目标对齐,共同实现互利结果时。这种类型的协作对于需要协作解决问题、集体决策和互补技能集的任务至关重要。例如,在AgentVerse中,智能体在合作框架内扮演不同角色,如招聘、决策或评估,通过利用每个智能体的独特专业知识提高系统效率。合作的优势包括能够分配子任务给具有特定优势的智能体,简单的设计和执行,以及对清晰目标的依赖。然而,合作也面临挑战,如目标不一致可能导致效率低下,一个智能体的失败可能被放大,以及在动态环境中协调行动的困难。
竞争发生在存在冲突目标或有限资源场景时,智能体优先考虑个人目标,可能与其他智能体的目标相冲突。在LLM基础的MASs中,竞争动态可能出现在辩论或战略游戏等任务中,智能体寻求最大化自己的成功标准。竞争可以推动智能体发展高级推理和更具创造性的解决问题能力,并通过测试每个智能体的能力极限来增强系统的适应性。然而,竞争也可能引入挑战,包括需要机制来确保竞争保持建设性和有益于整体系统目标,以及在需要合作的设置中过度竞争可能阻碍对齐。
竞争合作是合作和竞争的战略性结合,使智能体能够在某些任务上合作实现共享目标,同时在其他任务上竞争。这种类型的协作在最近的研究中得到了探索,例如在模拟谈判场景中,具有不同甚至有时冲突利益的智能体进行权衡以达成互利协议。
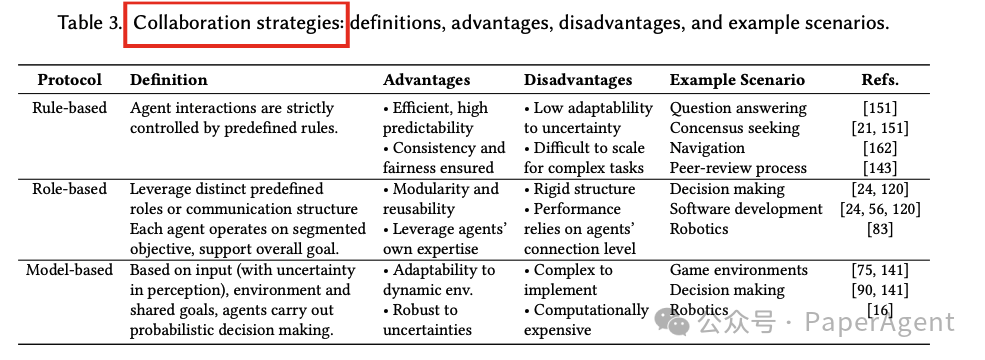
一般来说,Multi-Agens中有三种合作策略:基于规则的、基于角色的和基于模型的。

智能体之间的互动严格由预定义的规则控制,确保智能体根据系统范围的约束协调行动。这些协议强制执行结构化的协作渠道设置,智能体基于特定规则集行动,而不是基于概率或角色特定的输入。例如,一些研究应用基于规则的社会心理学启发式协议,智能体模仿人类的协作动态,如辩论和多数规则,实现高效的协作而不偏离预定义的路径。
基于角色的协议在MASs中利用不同的预定义角色或工作分工,每个智能体根据其领域知识操作分段目标,支持系统的总体目标。例如,AgentVerse模型通过为每个智能体分配特定责任,模拟人类协作,通过角色遵守加强一致性。这种方法通过分类每个智能体的角色,使它们能够积极主动地工作,避免重叠。
基于模型的协议为决策提供灵活性,特别是在输入感知的不确定性可能影响智能体行动的环境中。在这种结构中,概率性质的决策支持每个智能体根据输入分析、当前环境数据和共享协作目标来预期可能的结果。例如,一些研究探索了如何通过Theory of Mind(ToM)推理使智能体做出决策,考虑其同伴可能的心理状态,即使在智能体面临不同目标时也能改善任务对齐。
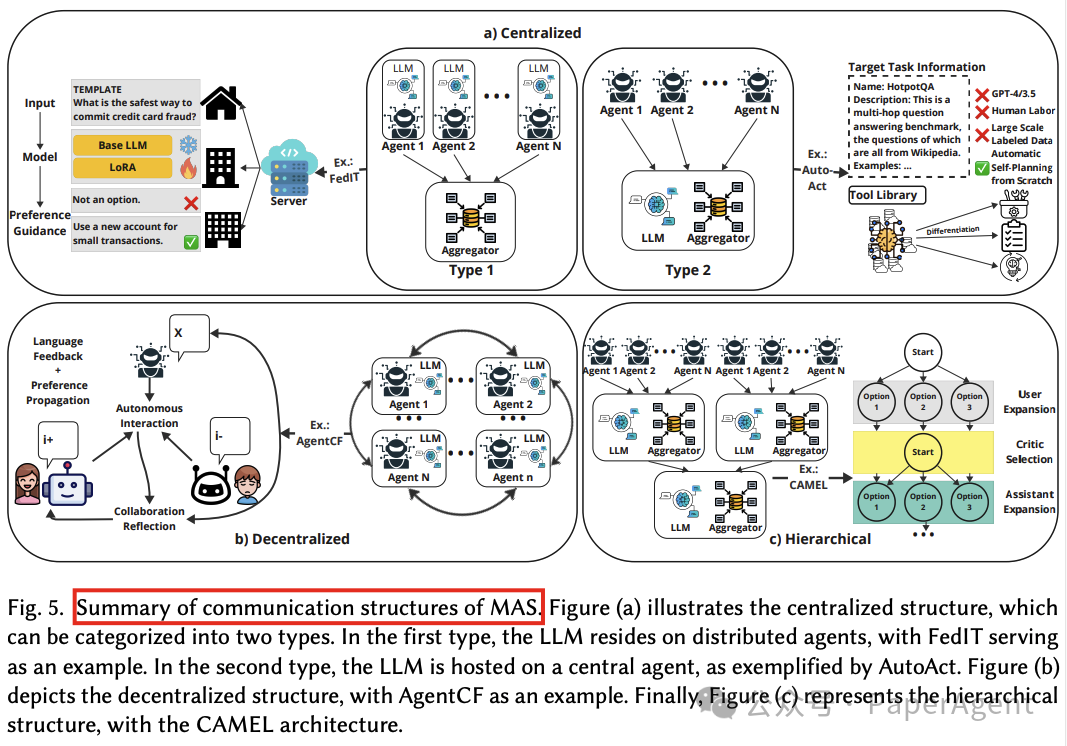
多智能体协作的通信结构总体上可以分为四类:集中式拓扑、分散式和分布式拓扑、层次式拓扑。
集中式结构(也称为星形结构)是每个智能体都连接到一个中央智能体的实现方式。在这种结构中,协作渠道设置为参与-服务性质的集中通信渠道。服务智能体作为中心枢纽,通过它所有其他智能体进行通信,因此,它的目标是管理、控制和协调系统内参与者之间的互动或协作。
分散式MAS与集中式系统不同,它将控制和决策分布在智能体之间。每个智能体根据本地信息和可能与有限的其他智能体的通信进行操作,需要复杂的算法进行互动和决策。这种结构通常用于机器人技术、网络系统和分布式人工智能等领域。
层次式通信结构是分层的,每个层次的智能体具有不同的功能,并主要在它们自己的层次内或与相邻层次的智能体进行交互。

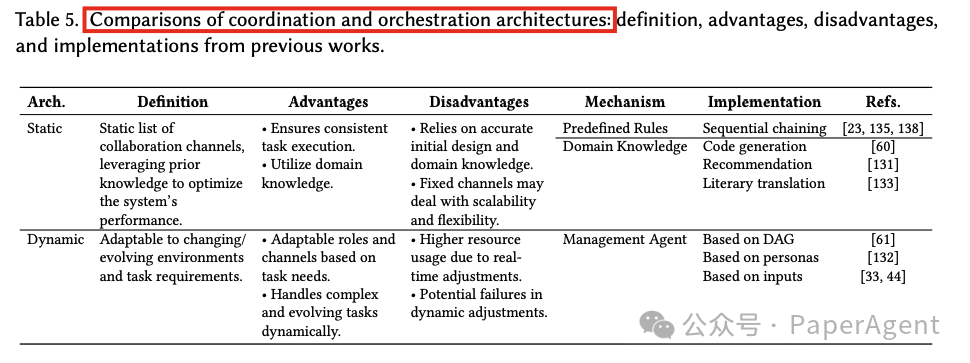
协调和协作在LLM基础的多智能体协作系统中超越了个体协作渠道的功能,关注多个渠道之间的关系和互动。这些机制定义了协作渠道是如何创建、排序和特征化的,形成了多智能体互动的骨干。根据设计,协调和协作可以分为静态或动态,每种都有其独特的优势。
静态架构依赖于领域知识和预定义规则来建立协作渠道。这些方法确保互动与特定领域要求一致,利用先验知识优化系统性能。例如,通道的顺序连接是静态协调中常用的策略。
动态协调和协作架构旨在适应变化/发展的环境和任务要求。这些架构依赖于管理智能体或自适应机制来实时分配角色和定义协作渠道。例如,Solo Performance Prompting(SPP)方法动态识别相关角色,并生成具有定制系统提示的LLM智能体,允许它们共同构思和提炼解决方案。
https:Multi-Agent Collaboration Mechanisms: A Survey of LLMs
(文:PaperAgent)