

手部灵活性在人们的日常生活中至关重要,尤其是在需要重新调整物体方向或重新抓握的任务中。软机器人末端执行器因其可变形手指的柔韧性,能够在与周围环境互动时表现出良好的适应性和安全性。然而,这种柔韧性也使得软机器人在执行高度动态任务时面临困难。例如,旋转笔等快速操作任务对软机器人系统来说仍然是一个巨大的挑战。
此前的研究主要集中在软机器人末端执行器的准静态任务上,如抓取和缓慢重新定位物体。这些研究虽然取得了一定进展,但与人类手部的灵活性相比仍有较大差距,难以应对快速且复杂的动态操作需求。此外,模拟环境与现实世界之间的差距,以及软材料滞后和蠕变等现象的复杂性,进一步增加了软机器人系统在动态任务中的实现难度。
▍提出SWIFT系统,助力实现高效动态旋转
以往关于利用物体动力学进行手持物体重新定位的研究,往往依赖于对物体属性(如重量和世界参数)的先验了解。然而,在实际应用中,这些参数可能事先未知。以旋转笔为例,仅凭视觉观察往往难以准确估计笔的重量及其重心的分布,从而难以找到成功旋转笔的适当动作参数。此外,旋转运动通常持续时间极短,需要高速感应,而高速感应并不总是可用,这使得闭环控制变得不切实际。
针对这些问题,来自卡内基梅隆大学机器人研究所的研究团队前不久已进行了深入研究,并提出了一种使用柔软柔顺的机械手学习动态任务的系统SWIFT。与以往依赖模拟、准静态动作和精确物体模型的研究不同,SWIFT系统通过现实世界的交互学习握笔和动态旋转技能,无需事先了解物体的物理属性。
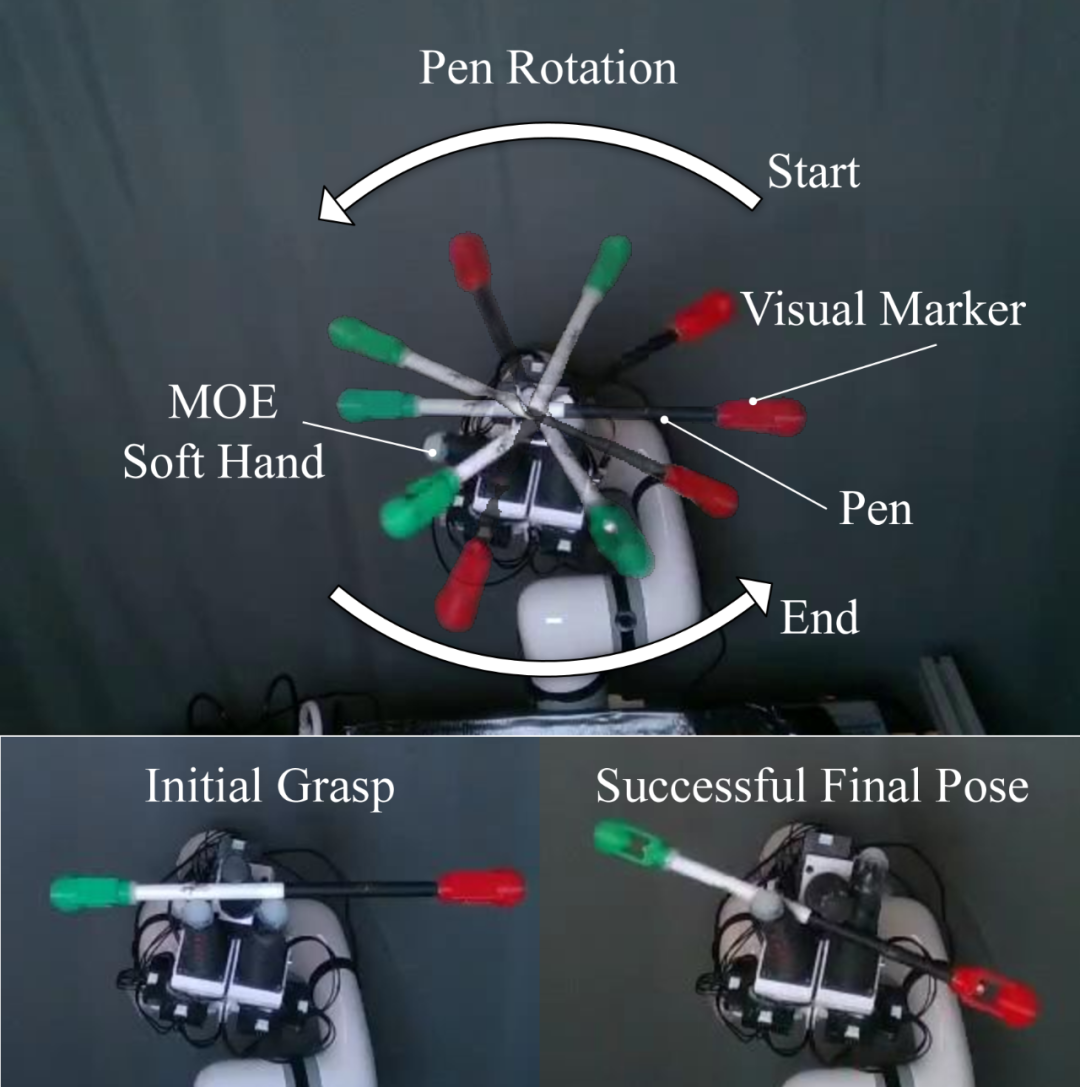
为了验证提出系统的有效性,研究团队选择旋转笔作为实验任务,因为这项任务具有丰富的接触特性,能够充分展示系统的动态操作能力。通过从现实世界中采样的自标记试验,SWIFT系统发现了一组笔抓握和旋转的原始参数,使软手能够稳健地旋转笔。实验结果显示,SWIFT系统在针对三支不同重量和重量分布的笔进行130次动作采样后,实现了100%的成功率。这一成果证明了SWIFT系统不仅具有通用性,还能稳健应对物体属性的变化。此外,研究团队还通过以10/10和5/10的成功率旋转刷子和螺丝刀,进一步展示了SWIFT系统在处理不同形状和重量物体时的通用性和鲁棒性。
那么,SWIFT系统究竟是如何实现这一突破的呢?接下来,和机器人大讲堂一起将深入了解SWIFT背后的技术原理和实现方式。
▍SWIFT的系统构成与实现原理
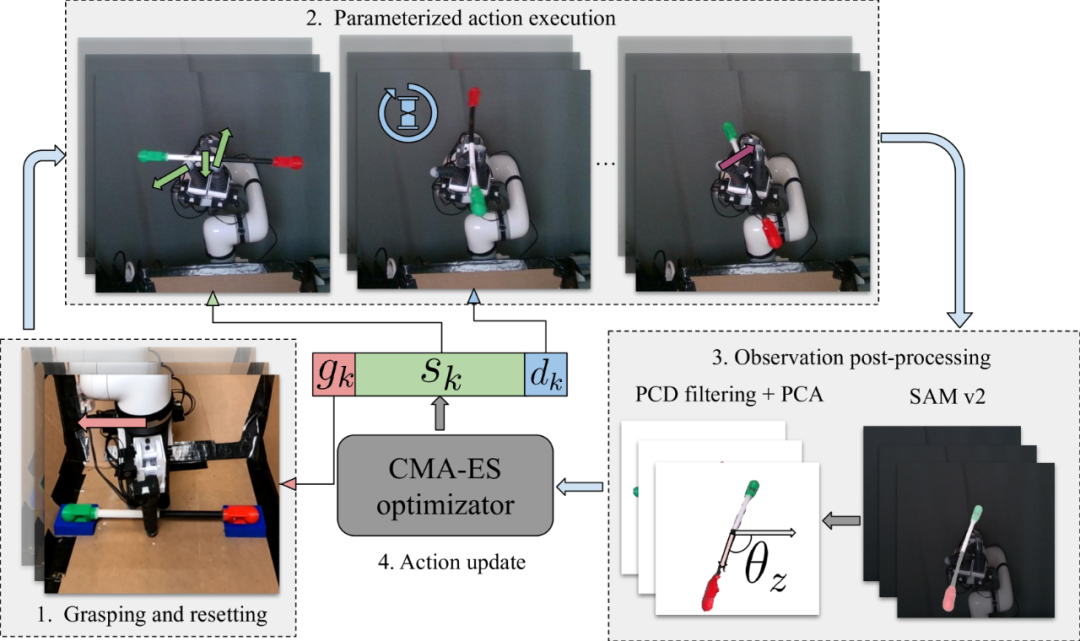
SWIFT,作为一种利用现实世界数据进行试错学习,以实现动态操控物体的技术系统,整合了软体机器人手、六自由度机器人臂、RGB-D相机以及优化算法CMA-ES等多项关键技术组件。
在SWIFT系统中,软多指全向末端执行器(MOE)是核心组件之一。MOE凭借其独特的柔软性和顺应性,能够安全、可靠地与环境进行交互,实现物体的稳定抓取及多种动态操作。这种特性不仅提高了机器人与环境的兼容性,还为实现复杂的动态任务提供了技术支撑。
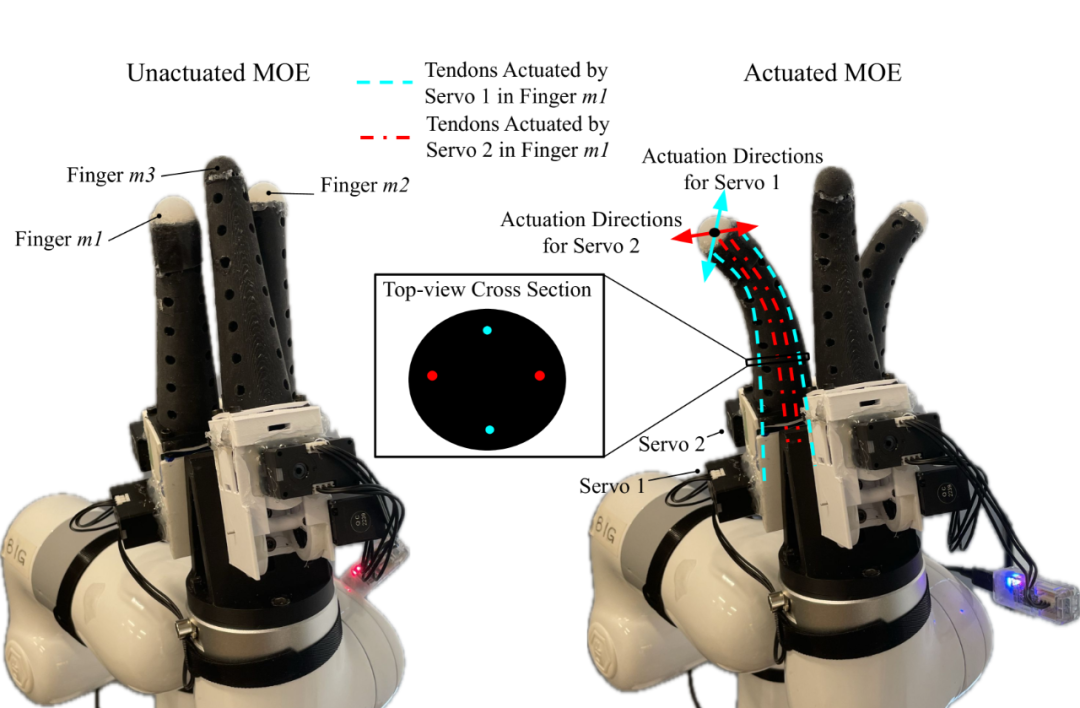
在设计上,MOE由三个腱驱动的软体机器人手指组成,每个手指均通过两个伺服电机控制四个腱。这种设计使得手指能够在垂直平面上弯曲,并通过组合伺服电机的运动,驱动每个手指尖端到达其半球形工作空间上的不同位置。此外,MOE的手指也经过精心设计,两个手指连接在手基座的一侧,最后一个手指连接在另一侧,这样的配置不仅提高了抓取的稳定性,还为后续的旋转动作提供了支持。
为了实现手内笔旋转的复杂任务,研究团队将笔旋转动作参数化为一组简化的变量,包括伺服目标、延迟时间和抓握位置等。伺服目标涉及每个伺服电机内PD控制器的目标角度,共包含6个参数,以精确控制手指的动作。延迟时间则受到人类旋笔动作的启发,主要用于优化从旋转动作结束到接笔动作开始的时机。抓握位置控制从抓握位置到钢笔中心的位移,使得机器人能够根据不同物体的属性进行灵活调整。
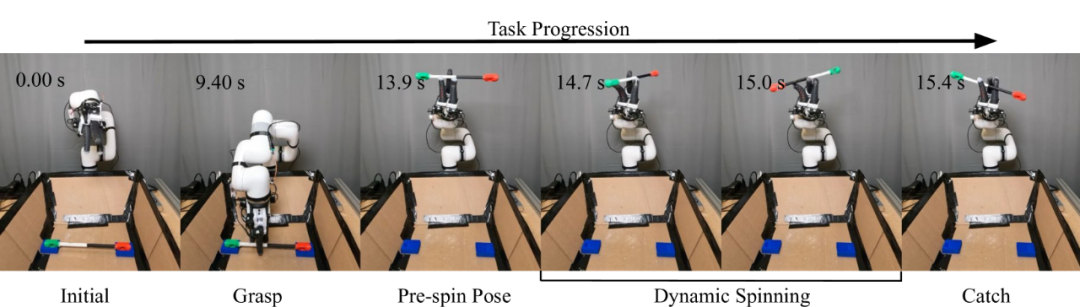
通过将笔旋转任务细分为抓取动作、旋转动作和接笔动作的组合,并明确指示机器人的抓取位置、一组6个目标角度以及旋转和抓取动作之间的延迟时间,研究团队成功地将旋转钢笔的搜索空间维度降低至8个参数。这一简化不仅降低了问题的复杂性,还为后续的优化算法提供了更为便捷的处理路径。

在优化算法方面,SWIFT系统采用了协方差矩阵自适应进化策略(CMA-ES)来优化动作参数。这一无梯度进化策略特别适用于优化非凸目标函数,能够在每一代中从多元正态分布中采样一组动作参数,并通过表现最佳的候选者进行更新。为确保机器人臂和MOE手的动作始终在机械限制范围内,研究团队还对优化算法的输出进行了严格约束,从而提升了系统的稳定性、实验的安全性和可靠性。
▍SWIFT性能测试与评估
为了全面评估SWIFT系统的性能,研究团队还进行了一系列实验,并对实验结果进行了详细分析。
他们选择了三支重量分布各异的钢笔作为测试对象,同时加入了螺丝刀和刷子等不规则形状物体以验证SWIFT系统的泛化能力。
其实验环境也经过了精心布置。为了实现可重复的笔抓取和相机观测,研究团队在实验环境中设置了一个固定槽位用于放置钢笔,并使用RGB-D相机来捕捉轨迹信息。此外,他们还设置了一个笼子以便在需要时由人工进行重置。
经过对每个物体130次采样动作测试后,SWIFT系统在三支钢笔上实现了100%的成功率。这一结果充分展示了系统的通用性和对物体属性变化的鲁棒性。同时,研究团队还发现,优化抓握位置和旋转参数可以大幅提升系统性能。
为了更深入地了解系统的性能表现,研究团队还对不同动作参数化的结果进行了深入比较和分析。他们发现,仅优化伺服目标和延迟时间的效果高度依赖于物体属性。此外,研究团队还测试了将针对Pen 1优化得到的动作参数应用于Pen 2和Pen 3的情况,结果发现直接应用这些参数的效果并不理想。这一结果表明,为不同物体优化抓握点和旋转动作参数对于适应不同笔属性至关重要。
除了钢笔之外,研究团队还将SWIFT系统应用于其他形状和重量的物体上,如刷子和螺丝刀。实验结果表明,SWIFT系统在这些物体上也表现出了良好的泛化能力。其中,刷子的成功率为10/10,而螺丝刀的成功率为5/10。尽管螺丝刀的形状较为不规则,但系统仍然能够优化动作参数并实现成功的旋转动作。这一结果充分展示了SWIFT系统的灵活性和适应性。
▍关于未来
SWIFT系统的成功研发不仅为软体机器人执行动态任务提供了新的方法和思路,还为未来的机器人技术发展开辟了新的道路。通过动态地处理手内物体重新定向的问题,机器人可以像人类一样在一个连续的动作序列中高效地完成任务。这一特性不仅提高了机器人的灵活性和智能化水平,还为机器人在日常生活中的应用提供了更多可能性。
展望未来,研究团队计划进一步扩展SWIFT系统的应用范围和功能。他们将继续优化算法参数和提高系统性能,以应对更加复杂和多样化的任务需求。同时,他们还将探索将SWIFT系统应用于其他领域和场景中的可能性,如工业自动化、医疗康复等。相信在不久的将来,我们将会看到更多基于SWIFT系统的创新应用和技术突破。
参考文章:
https://arxiv.org/html/2411.12734v1
https://soft-spin.github.io/
(文:机器人大讲堂)