
灵巧手是机器人的灵魂,是机器人复用人类生产所用工具的关键。特斯拉推出人形机器人Optimus以来,其灵巧手为了向仿人手方向进化,就在持续探索迭代。
由于机器人灵巧手集结构、软硬件系统研发于一体,其难点贯穿机械设计、驱动控制、传感反馈、算法优化等多个层面,目前全球灵巧手研究与产业化的主流方向普遍围绕着体积、自由度展开。
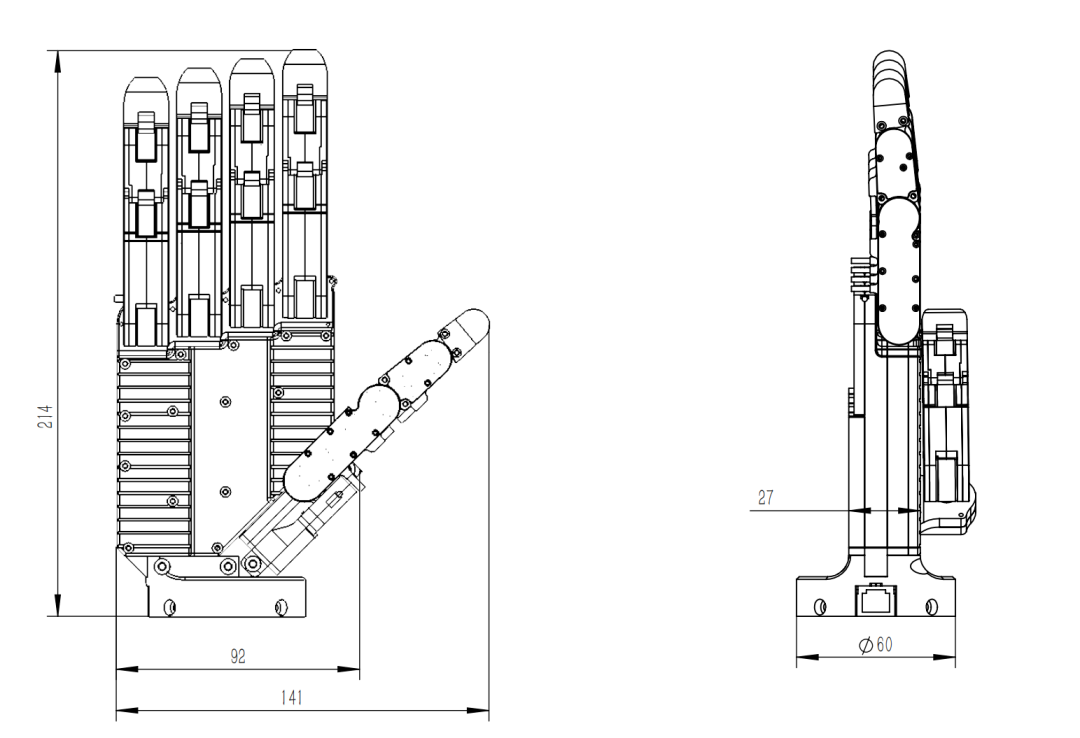
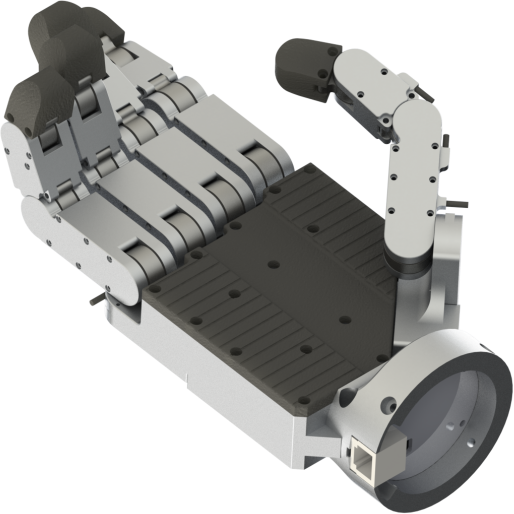
近日,机器人大讲堂独家获悉,南京一家企业就在产品上完美兼顾了体积和自由度特性,突破了体积–自由度–性能的“不可能三角”,这款名为EC-DexHand-5F的灵巧手,不仅有着20个主动自由度,而且尺寸是目前市面上能找到最小的一款!
这款产品将在4月15日在北京举办的2025人形机器人与具身智能产业大会上首次公开亮相。
▍20自由度最小灵巧手
灵巧手产品技术难度大,行业也大多存在“虚标”。据机器人大讲堂了解,目前市场上很多灵巧手企业虽然标称“20自由度”,或者“16+自由度”,但实际都会注明“主动自由度12个”等字样,这类产品一般很难获得海外企业以及高校实验室的认可。
原因是在机械领域,自由度大多是指机构具有确定运动时所必须给定的独立运动参数的数目,市面上大部分所谓20自由度灵巧手,本质上都达不到20个自由度,其真正的自由度只有其注明的主动自由度。为此,今年2月份韩国机器人技术公司Tesollo推出的五指仿人机械手Delto Gripper-5 Finger(DG-5F)一度宣称是全球市场上最小以及真正拥有20个独立自由度的产品。
相比TESOLLO的DG-5F,本次因克斯推出的EC-DexHand-5F不仅尺寸更小,其体积完全与成年男子手一样大,而且自由度分布更接近人类的手,便于使用其他设备获取人手的状态来遥操灵巧手采集数据。
就技术上而言,机器人灵巧手的复杂程度远超其他机器人部件,在更小的体积实现更多的自由度并非易事。因为在硬件结构设计上,灵巧手每个关节自由度的微型化设计都需平衡紧凑性与结构强度,例如仿生手指需容纳驱动单元、传动机构及传感器,同时需要兼顾输出力或响应速度的平衡,外表材料选择也需兼顾轻量化与耐用性、适应性和刚性。
在软件算法上,高自由灵巧手的实时求解由于涉及高度冗余的数学优化问题,更是需通过雅可比矩阵伪逆或神经网络快速生成可行解。例如多指协同操作时,需动态规划各关节力矩以避免自碰撞,并适应不同物体的形状与重量,这对计算资源的实时性要求极高。此外,阻抗控制则需精准建模环境刚度与阻尼参数,动态扰动下的稳定性保障仍是难题。
因克斯的做法突破了原有的结构,其在EC-DexHand-5F上采用了独创的关节小型化方案,将手指每个活动关节都做成一个独立的关节模组,并集成了电机、减速器和驱动器。这种分布式驱控设计可让灵巧手像“积木”一样灵活组合拆解,避免如交叉肌腱或联动齿轮等传统设计中多关节传动链的复杂结构,降低了整体机械复杂度。

为了防止过热损伤,延长模组寿命,EC-DexHand-5F还在如此小空间内实现了每个关节配置双编码器和温度电机温度传感器,这种设计有效保证了电机过温失效,显著降低机械磨损与热衰减风险,提高了产品的可靠性,让灵巧手断电重启零位不丢失,便于落地到真正的场景中。
更进一步拆解,其内部电机采用的是直流无刷电机,经过因克斯数次优化,已经能做到在保证较大扭矩输出的同时,平衡低齿槽转矩,让指关节力矩输出更加平稳和柔顺。由于将每个指节做成独立的关节模组,这种做法简化了逆运动学求解,多个单自由度闭环控制,所以灵巧手的指节控制协议也与因克斯关节模组通信协议能保持一致,便于客户上手,同时该设计还同时支持伺服控制、力位混控、力矩控制、电流控制、阻尼模式等,降低了算法复杂度,且模式切换可以无缝衔接,不需要断电重启。
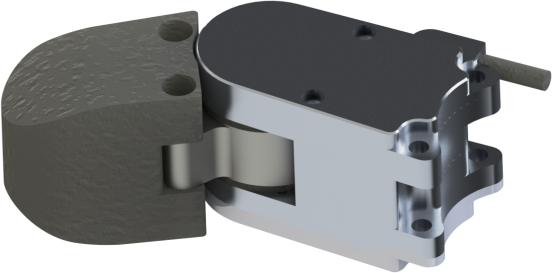
(手指末端关节驱控一体)
目前,EC-DexHand-5F指节力矩最大可达2Nm,最大负载2kg,已经足够满足机器人在人类日常生活中的任务操作需求,而且EC-DexHand-5F的指节驱动则采用高精度的驱动芯片,电流控制精度可以达到0.1A的有效值,因此指节力矩精度能够突破0.05Nm以上,从而能够完成更多精密操作。
可以预见,基于模块化关节与冗余散热设计,EC-DexHand-5F在寿命与可靠性方面也会有着更优表现。因克斯透露,公司已规划针对工业、医疗等典型场景的寿命压力测试,计划于2025年发布完整的可靠性验证报告,为不同领域用户提供量化选型依据。尽管使用寿命数据仍需结合具体工况实测最终验证,但基于实验室加速老化测试与同类模块的历史表现,因克斯这款产品将在耐久性情况上同样值得期待。
▍交期与价格一览
成本与可靠性的平衡是产业化的关键。由于高精度传感器、定制化关节与仿生材料的成本高昂,往往限制了全球灵巧手的大规模生产与应用。
在价格方面,韩国的ILDA hand售价为5万美金一只,英国的Shadow robot灵巧手售价高达10美金一只,Alt-bionic的灵巧手也需要3万美金一只,TESOLLO推出DG-5F虽未公布售价但预计也达到数万美金,国产低自由度灵巧手售价则已经来到了2万~7万元人民币。
因克斯的EC-DexHand-5F相较国外同类型产品,在体积与自由度方面有着明显优势,但目前初步售价仅定为20万元人民币,国外售价也仅在3万美金,以便于更准确覆盖更大范围的科研以及产业用户,未来基于用户反馈实现持续的迭代。
因克斯对机器人大讲堂透露,之所以制定20万元人民币的销售价格,并非旨在与国内同行进行价格战,因为20万元的价格对于大多企业和科研机构会是一个较大的需求分水岭。但是20万元的价格背后所蕴含的新技术架构,却可以吸引全球更多关注灵巧手科研以及产业化落地的探索者。
EC-DexHand-5F这种独特的20自由度设计,每个关节均可实现反驱,可做力反馈和力控,非常符合具身大模型训练的需要,能够让人形机器人与具身智能体的灵巧操作真正朝着“指尖级”能力进化,技术优势非常明显。
机器人大讲堂获悉,目前physical intelligence(Pi)团队已经与因克斯建立联系,前者就对该项技术表现出了极大的兴趣。因克斯计划5月份正式开始陆续出货第一版产品,以帮助首批合作开发者占据领先的优势。
同时,因克斯也直言,该款产品目前已经解决核心零部件的量产问题,后续产品优化还会根据用户反馈持续进行,未来随着产能的提升和销售的上涨,以及未来降本工作的开展,售价也有望逐步下调,这将为其未来攻下海内外市场打下更加坚实的基础。
▍更多产品系列
非常值得关注的是,在本次大会上,因克斯还带来了另外两个系列的产品,来助力人形机器人和具身智能行业发展,分别是BMS的机器人专用智能电池和轻量化谐波关节模组。
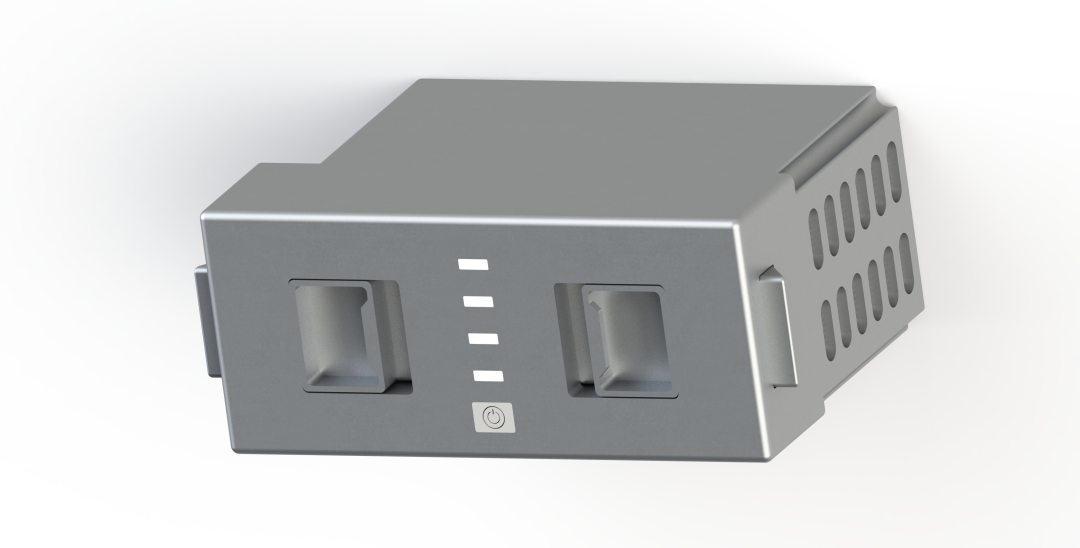
(ENCOS智能电池)
因克斯目前发布三款智能电池分别是EC-BAT48V-240Wh、EC-BAT48V-468Wh和EC-BAT48V-2986Wh,这三款将在5月中旬陆续出货。这三款型号主要运用场景是小人形机器人(1m高度)、中型人形机器人(1.4m高度)、全尺寸人形(1.8m高度),同样也适合小四足(15kg重)、中型号四足(30kg重)和工业级四足机器人(60kg重)等。因克斯智能电池采用最新的三元锂21700圆柱电池,能量密度高达300Wh/kg。具备六大保护功能:过充保护、过放保护、三级过流保护、10us低延时短路保护、过温保护以及支持容性负载的预放保护。有效保护电池,避免损坏,支持485、CAN通讯、具备无线模块,实现高速回传电池电压、电流、温度等状态信息。
对于跨界推出智能电池,因克斯团队称,其主要考虑的是用于提高机器人的整体用电安全性。由于目前产业界缺乏一定整合,开发者外购电池方案往往很难满足产品的一体化设计需求,因此,因克斯尝试将关节模组,通信模块、智能电池三者合并为一个完整的机器人动力解决方案,以此降低机器人的硬件制造门槛。此举也有望缩短开发者研发周期,专注于整机设计和落地场景,并更好解决企业量产化问题,为人形机器人整机以及具身智能企业实现产品落地提速。
关于轻量化谐波关节模组,因克斯推出的也是三款,分别是EC-A3814-H14-107、EC-A5013-H17-100、EC-A6013-H20-100。三款产品主要性能如下。

三款模组的性能非常强悍,相比于普遍用于协作机器人场景的谐波模组,因克斯的产品重量轻了将近1/2,更加适用在C端场景使用。推出这三款性能阶梯的产品,因克斯团队主要考虑的是把场景聚焦在人形机器人的手臂,咖啡、奶茶机器人等对关节模组重量比较看重的场景,这三款产品可以通过不同的组合实现2~5kg的机械臂设计,能满足绝大多数针对C端场景的机器人需求。

(EC-A3814-H14-107、EC-A5013-H17-100、EC-A6013-H20-100图)
同时因克斯称,也会在近期推出中空版本的行星关节模组,将进一步利于机器人的走线和外观设计。
▍关于企业
因克斯智能科技有限公司自2022年成立以来,一直以专注品质,追求极致为理念,坚定看好人形机器人和具身智能赛道,与客户共同成长。
目前公司月产能为4000个关节,已经初步建设完整的生产流程体系,保证产品的品质,到今年年底,计划实现月产能1万台关节,并且与客户一起搭建更加完善的供应链体系。
(文:机器人大讲堂)