
线虫是一种非常独特的生物,其身体的细度甚至比人的头发还要纤细。尽管它们没有腿,但却能够跳跃,且跳跃的距离是其自身长度的20倍。可以想象,如果我们躺在地上,突然一起身,竟能跳跃到一栋三层楼的高度,这种能力类似于线虫的跳跃表现。
近日,佐治亚理工学院化学与生物分子工程系(ChBE)的博士后研究员Sunny Kumar,针对线虫的身体结构,开发了一种名为SoftJM的物理模型,并通过软机器人验证了这一模型在实际跳跃中的潜力。该研究成果已于《Science Robotics》四月刊上正式发表。
▍研究方法与实验设计:
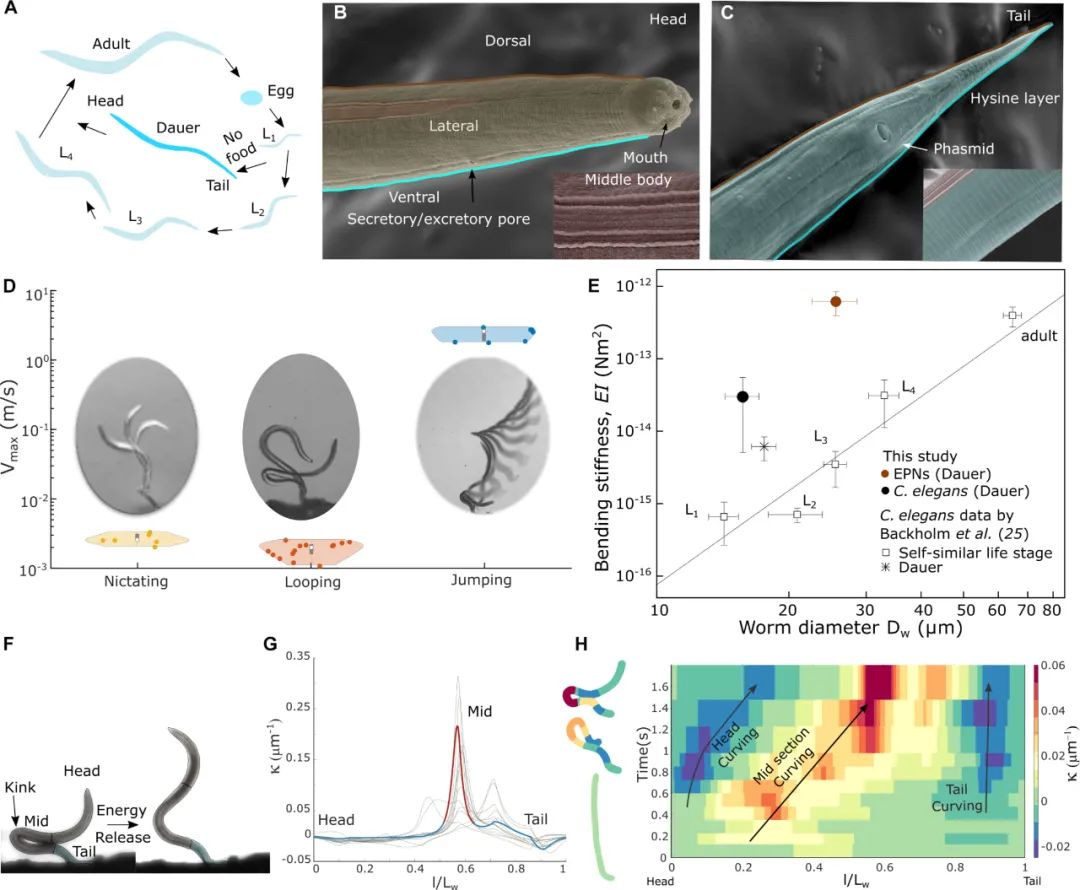
为了获得具有代表性的昆虫病原线虫(以下简称EPNs)样本,研究人员在实验室条件下进行了严格的培养。具体而言,EPNs(S. carpocapsae)被接种在含有蜡螟幼虫(Galleria mellonella)的Petri培养皿中。作为EPNs的宿主,这些幼虫为线虫的生长与繁殖提供了必要的营养环境。经过几天的培养,当幼虫因感染而死亡后,研究人员便收集并将EPNs悬浮在水中,准备进行后续实验。
EPN、SoftJM 和模拟的定向跳跃
为了诱导EPNs表现出跳跃行为,研究人员设计了一套特定的实验装置。在该装置中,垂直放置的滤纸作为跳跃平台,平台上滴加了含有EPNs的液体介质。通过精确控制环境的湿度以及施加化学刺激(例如暴露于二氧化碳浓度较高的空气中),研究人员成功诱导了EPNs的跳跃行为。
为捕捉EPNs跳跃的全过程,研究人员使用了高速摄像机(Photron FASTCAM SA-Z)。该摄像机以每秒10,000至30,000帧的速度记录了EPNs从准备跳跃、离地直至腾空的整个过程。
随后,研究人员借助图像处理软件(如DLTdv8)对记录的视频进行了详细分析,提取了EPNs在跳跃前的身体形态变化、跳跃的高度、速度及加速度等关键参数。这些数据为研究人员深入理解EPNs跳跃的生物力学机制提供了宝贵的参考依据。
▍物理模型的构建与测试
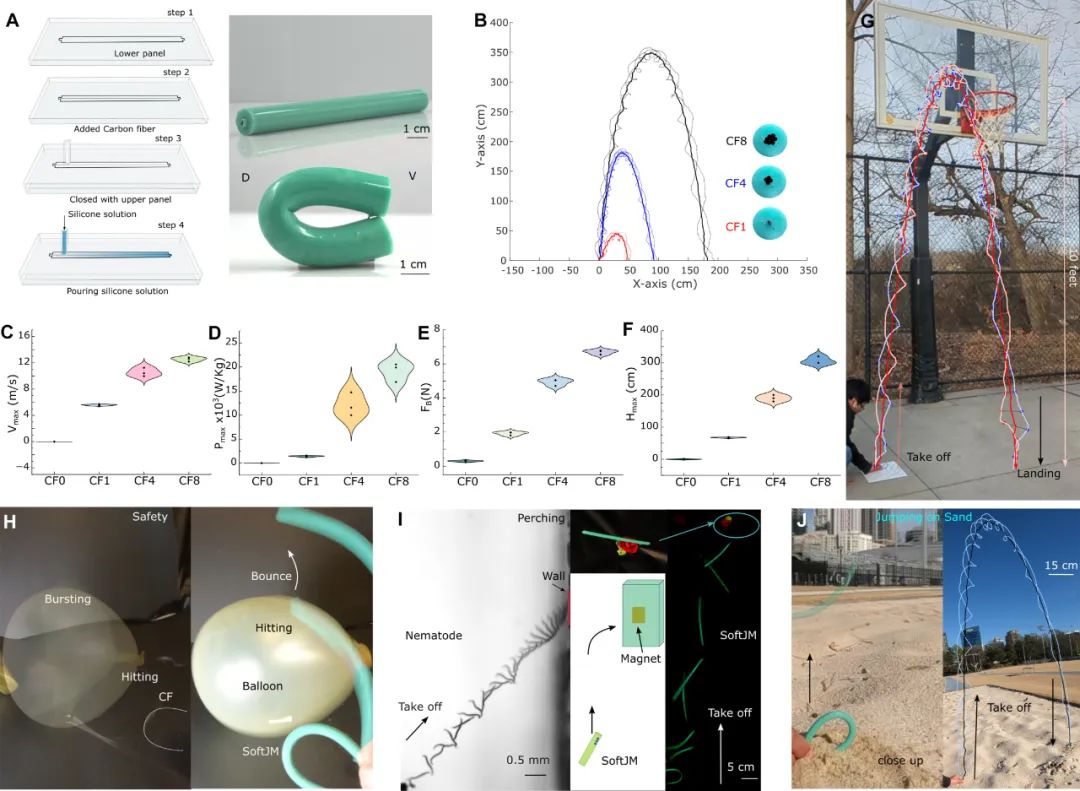
为了验证EPNs跳跃机制在软体机器人中的应用潜力,研究人员设计并制作了四种不同类型的生物启发物理模型(SoftJM)。这些模型模拟了EPNs在跳跃过程中通过扭结不稳定性来存储和释放能量的过程。
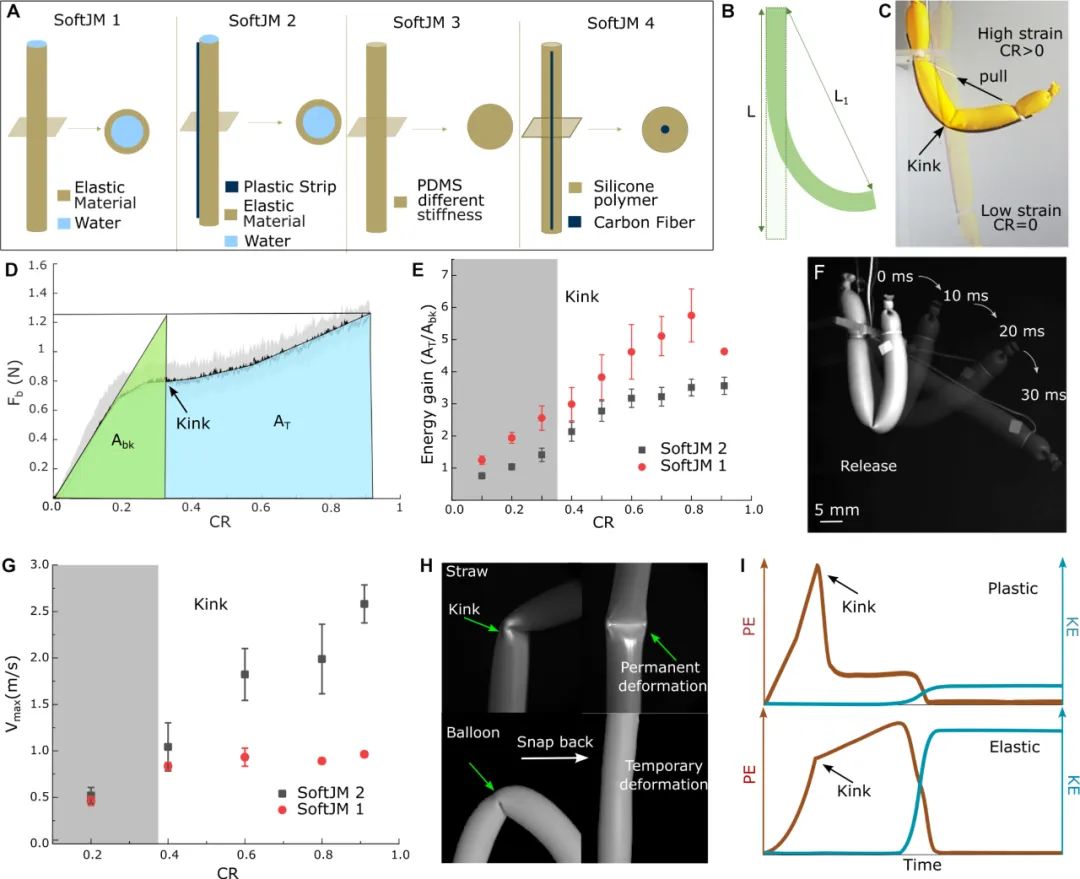
SoftJM 1:该模型采用水静力学骨架,由充水的长乳胶气球制成,模拟了EPNs液态连接α形环结构。通过调节充水量,研究人员能够控制模型的刚度与形态,从而探索不同条件下模型的跳跃性能。
SoftJM 2:在SoftJM 1的基础上,研究人员添加了塑料条作为刚性骨架,以增强模型的刚度。此设计模仿了EPNs体内可能存在的增强结构,探讨了刚度对跳跃性能的影响。
SoftJM 3:该模型由不同弹性模量的聚二甲基硅氧烷(PDMS)材料制成。通过调整PDMS与交联剂的比例,研究人员可以精确控制模型的刚度,以研究材料特性对跳跃性能的影响。
SoftJM 4:为了进一步增强模型的刚度和能量存储能力,研究人员在硅胶基体中加入了碳纤维骨架。碳纤维的加入显著提高了模型的强度和刚度,使其在弯曲过程中能够形成更稳定的扭结结构,从而实现更高的弹性势能存储。
在物理模型的测试过程中,研究人员利用定制的实验装置对每种模型进行了弯曲实验。通过记录不同弯曲应变下的恢复力,研究人员评估了扭结不稳定性对能量存储与释放的影响。实验结果表明,带有刚性骨架的SoftJM 2和SoftJM 4模型在弯曲过程中能够形成更加稳定的扭结结构,显著提高了能量存储能力;在释放时,这些模型能够释放出更高的动能,从而实现更高的跳跃高度与速度。
▍数值模拟与验证
为了深入研究EPNs跳跃过程中扭结不稳定性机制,并验证物理模型测试结果的准确性,研究人员采用了Cosserat杆模型对EPNs的跳跃过程进行了数值模拟。Cosserat杆模型能够模拟弹性杆在外力作用下的弯曲、扭转与拉伸等变形行为,特别适合分析EPNs跳跃过程中的动力学现象。
在数值模拟中,研究人员首先根据EPNs的实际尺寸与形态建立了Cosserat杆模型,并为模型设置了合适的材料参数和边界条件。通过调整模型的参数(如长宽比、刚度等),研究人员模拟了在不同条件下EPNs的跳跃过程。具体而言,研究人员重现了EPNs从环形结构的形成、扭结的生成到环形结构展开的全过程,并记录了模型在不同时间点的形态变化、应力分布以及能量转换情况。
为了验证数值模拟结果的准确性,研究人员将模拟结果与实验数据进行了对比。通过调整模拟参数和模型假设,研究人员发现,当模拟条件与实验条件一致时,数值模拟能够较为准确地预测EPNs的跳跃性能及其扭结不稳定性机制。此外,研究人员还利用数值模拟探讨了不同参数对EPNs跳跃性能的影响,为进一步优化物理模型与软体机器人的设计提供了理论依据。
通过线虫培养与观察、物理模型构建与测试,以及数值模拟与验证这三个核心环节的研究,研究人员深入揭示了EPNs通过可逆的扭结不稳定性实现高效跳跃的生物力学机制,并验证了这一机制在软体机器人设计中的应用潜力。这些研究成果不仅为软体机器人技术的发展提供了新的思路和方法,也为生物力学领域的相关研究提供了宝贵的参考。
▍研究结果
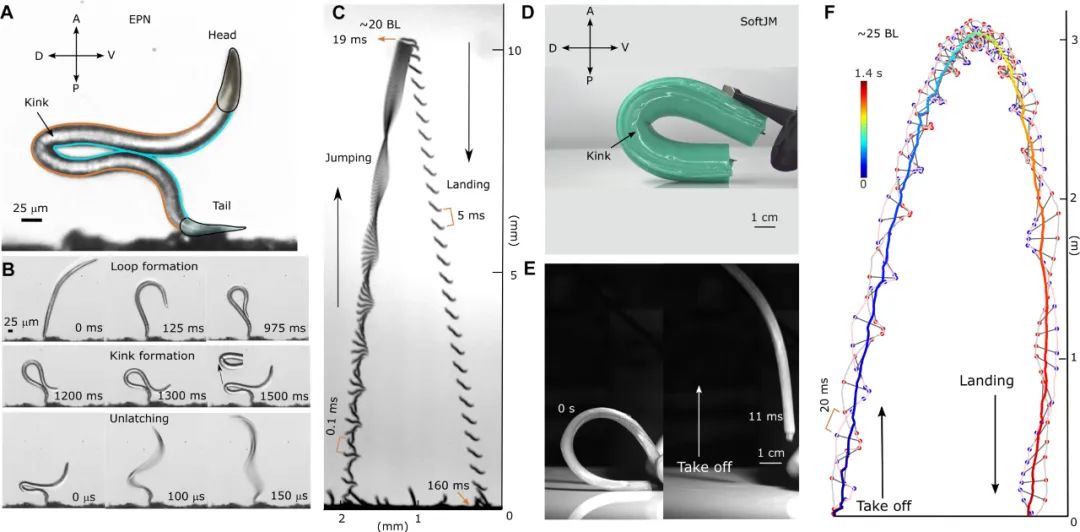
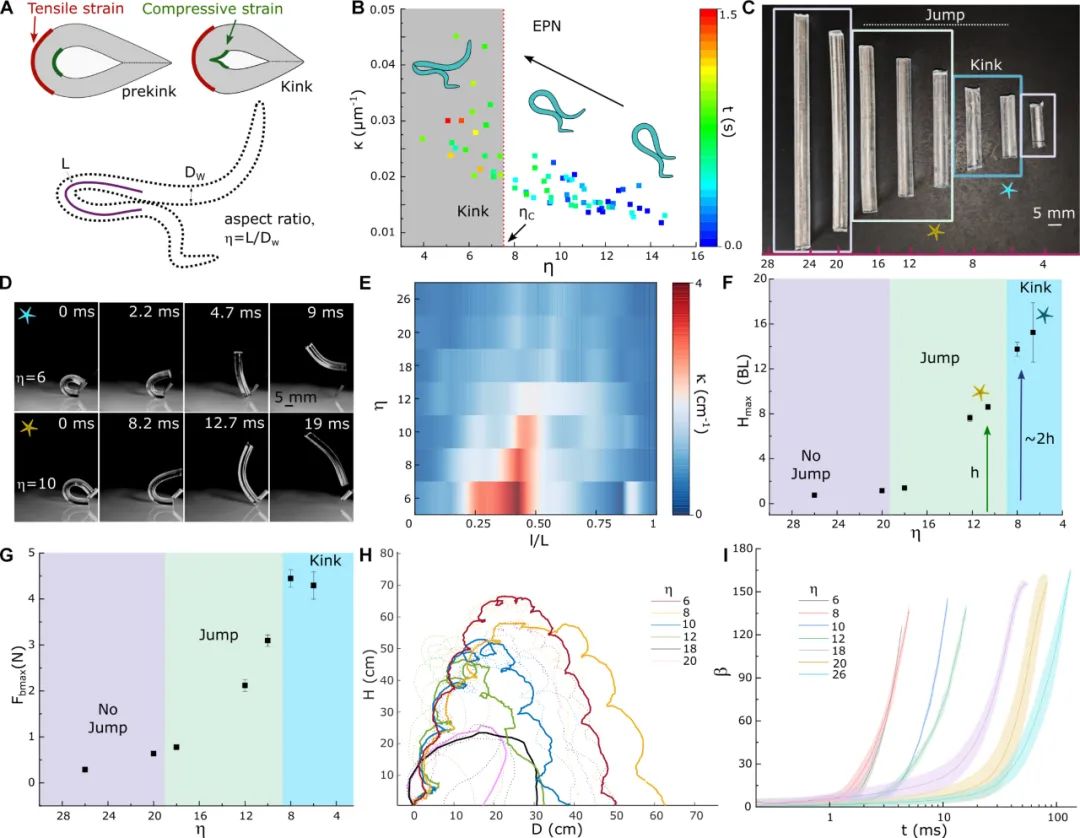
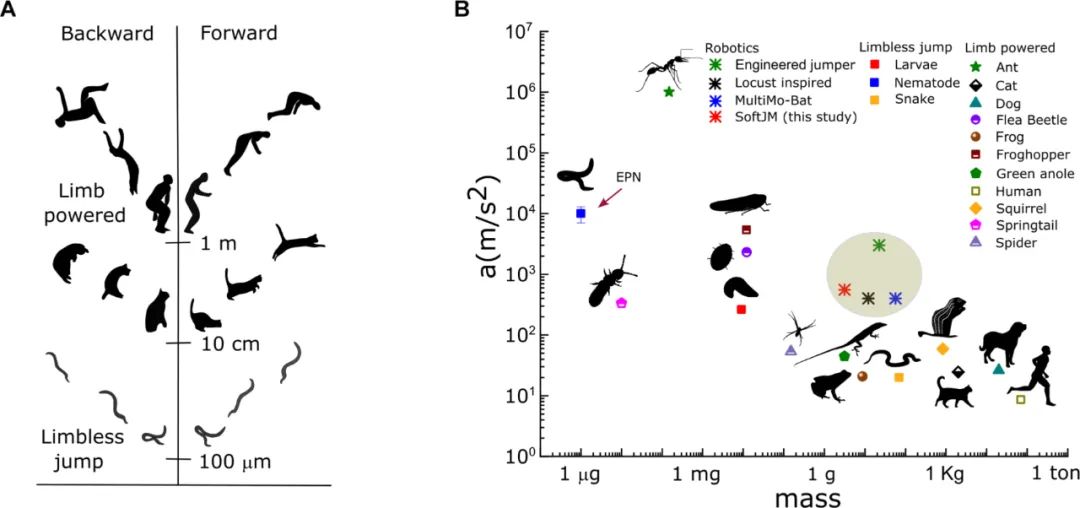
通过对EPNs跳跃过程的高速摄像记录与图像分析,研究人员发现,EPNs能够实现高达其体长20倍的跳跃高度,并产生约10^4瓦特/千克的功率,这一性能远超传统软体机器人。EPNs的跳跃过程可分为三个关键阶段:环形结构的形成、扭结结构的形成以及环形结构的展开。
在环形结构形成阶段,EPNs通过主动调节其身体的长宽比,在腹部形成液态连接的α形环结构。此结构为后续能量的存储提供了基础。在扭结结构形成阶段,随着环形结构的进一步压缩,其压缩侧的曲率超过临界值,进而形成扭结结构。此过程中,EPNs的身体形态发生显著变化,为能量的快速释放创造了条件。在环形结构展开阶段,扭结迅速打开,释放出储存的弹性势能,推动EPNs完成高效跳跃。
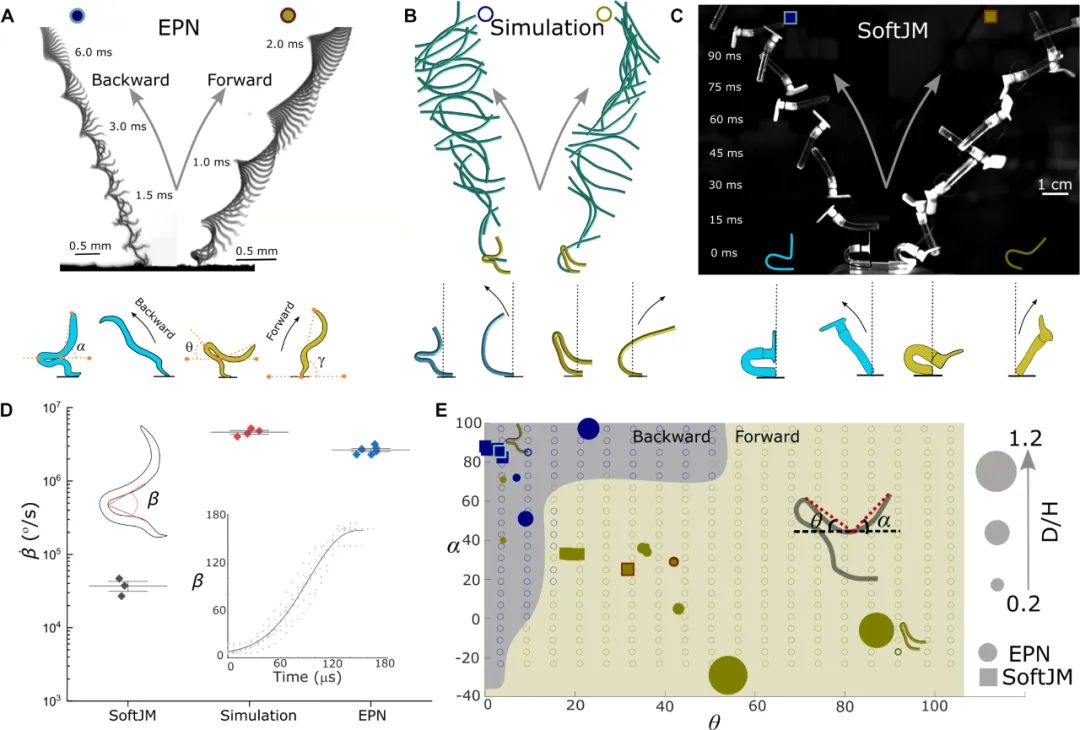
此外,研究人员还观察到EPNs具有出色的方向控制能力。通过调整其头部角度和环角度,EPNs能够实现向前和向后的双向跳跃,这一发现为软体机器人的运动控制提供了新的思路。EPNs的方向控制机制可能与其神经系统对肌肉活动的精确调控有关,未来研究可进一步探索这一机制,以提高软体机器人的运动灵活性和适应性。
▍物理模型性能的验证与优化
为了验证EPNs跳跃机制在软体机器人中的适用性,研究人员设计并测试了四种不同类型的生物启发物理模型(SoftJM)。实验结果表明,带有刚性骨架的SoftJM 2和SoftJM 4模型在弯曲过程中能够形成稳定的扭结结构,显著增强了能量的存储能力。在释放时,这些模型能够释放出更高的动能,从而实现更高的跳跃高度与速度。特别是SoftJM 4模型,凭借碳纤维骨架的加入,其刚度和能量存储能力得到了显著提升,成功实现了高达25倍体长的跳跃高度,展现出卓越的跳跃性能。
此外,研究人员还发现,物理模型的跳跃性能与其长宽比和刚度之间存在密切关系。较低的长宽比有助于增加中段的曲率,从而提高能量存储能力;而较高的刚度则使得系统更容易形成稳定的扭结结构,在展开时释放出更多的动能。基于这一发现,研究人员为软体机器人的设计提供了重要的优化方向:通过调整模型的长宽比与刚度,可以有效调控其跳跃性能。
▍扭结不稳定性的机制探索与数值验证
为了深入理解EPNs跳跃过程中的扭结不稳定性机制,研究人员采用了Cosserat杆模型进行数值模拟。模拟结果与实验数据高度一致,验证了数值模拟的准确性和可靠性。通过数值模拟,研究人员发现扭结不稳定性在EPNs跳跃过程中发挥了关键作用。在弯曲过程中,EPNs的身体形成扭结结构,该结构使得系统能够在有限的肌肉力量下高效地存储能量。在结构展开时,扭结迅速消失,释放出储存的弹性势能,推动EPNs实现高效跳跃。
此外,数值模拟还揭示了长宽比和刚度对扭结不稳定性的影响。通过调整模型的相关参数,研究人员发现较低的长宽比和较高的刚度有助于形成更稳定的扭结结构,从而提高能量的存储与释放效率。基于这一发现,研究人员为软体机器人的设计提供了理论依据,表明通过优化模型的长宽比和刚度,可以进一步提升其跳跃性能。
▍结语与未来:
研究团队通过实验证明了可逆扭结不稳定性在EPNs跳跃过程中起到了关键作用,并且这一机制在显著提升软体机器人跳跃性能方面具有巨大的潜力。借鉴EPNs的跳跃机制,研究人员成功设计并验证了基于可逆扭结不稳定性的软体机器人跳跃模型(SoftJM),为软体机器人的发展提供了全新的思路和方法。
研究团队指出,未来的研究可进一步探索扭结不稳定性在其他软体机器人应用中的潜力,例如在爬行、游泳或抓取等任务中的应用。通过结合智能材料和自适应结构,研究人员有望开发出具有更高灵活性与适应性的软体机器人,以满足复杂环境下的多样化需求。
(文:机器人大讲堂)