

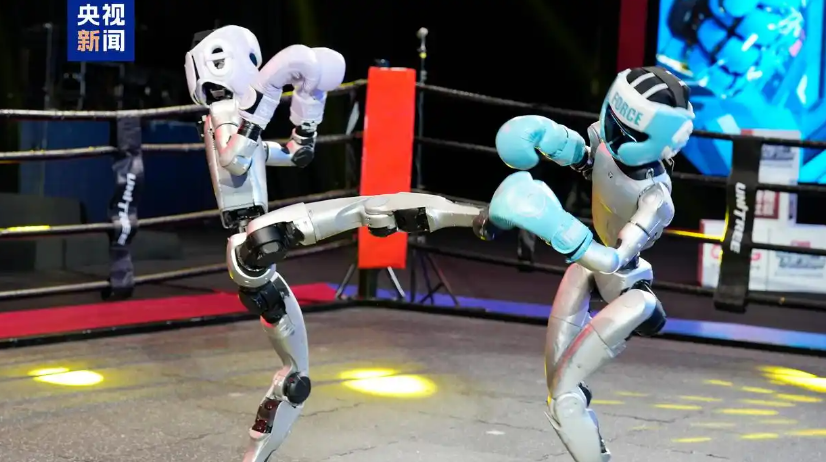
5月25日晚,《CMG世界机器人大赛·系列赛》机甲格斗擂台赛在浙江杭州拉开帷幕,这是全球首个以人形机器人为参赛主体的格斗竞技赛事。
赛事采用身高130cm、体重35kg的四台宇树G1机器人,身着黑、粉、红、绿四种颜色护具,其搭载深度相机实现180°广角视野,具备快速恢复平衡和自主起身能力,其电池续航达2小时,最高移动速度达2米/秒。
大赛分为表演赛和竞技赛两大板块。表演赛中,人形机器人结合灯光与音乐编排,充分展现其协同控制与动态响应能力。竞技采用积分制,共3回合,每回合2分钟。击中头部、躯干为有效击打,手部动作有效击打计1分,腿部动作有效击打计3分。倒地一次扣5分,被击倒8秒内无法起身则扣10分,本回合结束。
在格斗中,需要机器人能做出基础动作和识别对手精准打击。因此在操作方式上,本次比赛中宇树科技的机器人的操作除此前已知的手柄控制外,还用到了语音控制和体感控制两种操作方式。基于多种操作方式,此次格斗比赛中,宇树科技机器人展示出了刺拳、勾拳、踢腿、闪避等9种格斗动作,也展示了快速起身和部分主动识别跟踪对手的能力。这是目前全球范围内已知唯一能实现这些能力的机器人。
▍比赛过程概览
在前两轮比赛中,出手凌厉的“缎机巧匠”小粉PK运筹帷幄的“AI策算师”小黑;走位出其不意的“甲胄木兰”小红对战招数扎实稳健的“能量枢卫”小绿。“AI策算师”与“能量枢卫”战胜对手成功晋级决赛。

在最后的决赛中,“能量枢卫”超高爆发力率先出击,一记迅猛的膝踢击中对手;“AI策算师”踉跄后迅速恢复稳定,随后开始以一连串的直拳反击逐步打乱对手节奏。
经过激烈角逐,操作员陆鑫操控的“AI策算师” (小黑)凭借精准的战术决策和稳定的发挥,以积分优势击败对手,夺得冠军,获得 “格斗之星” 称号。

▍技术成果解析
纵观整场宇树G1 格斗赛,从机器人跌倒后类人化的流畅起身,到精准的战术闪避与组合拳连击,机器人在攻防转换中展现出的动态平衡能力与算法驱动下的快速响应机制,充分验证了机器人底层运动算法与机械结构的协同优势,为机器人运动控制技术树立了新的标杆。
和此前展示的跑步、跳舞、后空翻等所处的环境不同,G1在本次格斗比赛中,需要面临的是随时会给自己施加干扰的动态互动环境,同时,格斗要求机器人在快速变化的环境中实时调整姿态、预判对手意图,而且高度的对抗性更是会给整个系统的稳定性带来更多的挑战,机器人需要在外力冲击下(如被击打或打滑),需通过短时记忆和动态调整维持平衡。
在比赛过程中,机器人想要迅速做出拳击、踢腿、闪避等连贯且稳定的格斗动作,而且打得中对手,则需要基于人工智能的运动控制算法,精准处理多关节协同运动,实现毫秒级响应,并且表现出优秀的平衡性,本次比赛中,宇树G1精准的打点和灵活的闪避技巧就足以令人惊叹,毕竟视觉数据处理和动作规划需消耗大量算力,虽然人为帮助校对了一部分,但反应速度可以说非常快。
站得稳,是人形机器人落地应用的必修课。走路、跑步、跳舞、空翻,再到如今的格斗竞技,人形机器人的稳定性和控制力也在经受越来越复杂的考验。机器人如何在极大的外部冲击下保持平衡,一直是备受关注的焦点。

其技术难点在于机器人需在毫秒级响应中协调多关节运动,避免二次失衡。而且格斗中机器人需频繁做出快速、剧烈且方向多变的动作,如挥拳、踢腿、闪避、移动等,这些动作会产生较大的冲击力和扭矩,容易使机器人失去平衡。同时,机器人要准确完成各种格斗动作,如出拳击中特定部位、踢腿达到一定高度和力度,需要多个关节精确协同运动。比赛中机器人需要持续输出较高的功率来支持其运动和各种功能,因此需要可靠的能源供应系统。
可以说格斗场景能全面检验机器人的机械结构、运动控制、传感器融合和智能决策能力,例如动态平衡、抗冲击性、多模态感知协同等。
除了格斗动作,倒地以后能不能在8秒内快速起身,是这场格斗赛事中至关重要的一项评判依据,也是对人形机器人软硬件技术的一次抗压试验。看似简单的起身动作,在过去数十年内一直是人形机器人的巨大瓶颈,而如今,宇树机器人基于运动控制算法,调用机器人全身29个电机同步配合已经能够轻松完成,展现出强大的快速恢复能力。
一般而言,机器人不仅需要具备高扭矩的关节电机以支撑快速起身动作,在摔倒时可能因惯性较大导致损伤,还需通过轻量化材料与结构设计减少冲击,同时保证足够的机械强度,这种鲁棒性更是衡量其智能化与实用性的关键指标。而且随着算法、硬件与感知技术的进步,这一能力将加速推动机器人在救援、工业等场景的落地应用。
综合而言,本次宇树的格斗赛操作方式融合了动作控制、智能决策等多种算法模型,当操作人员发出“勾拳”“踢腿”等指示的时候,机器人的感知系统会迅速定位对手并构建地图数据,决策系统根据学习训练评估环境、目标和指令,生成可执行策略路径,最后由控制执行系统完成动作,而机器人自身的高爆发力动力系统为动作力量的输出提供强大支持;仿生机械结构设计既能保证动作柔韧性,又能有效缓冲外部压力;超大关节运动角度空间则让机器人能更出色饱满地完成格斗指令。
▍仿真技术应用
除了本次赛事所使用的机器人采用国产自主研发的核心技术,为了在赛场上展现出最佳状态,参赛队伍在赛前还进行了大量仿真训练,不断提升人机协同的默契度。宇树G1通过深度强化学习和仿真训练优化算法,这使得其才能应对实际场景中的多个突发干扰。
来自不同领域的操作员与机器人协同执行格斗动作,制定出多样的格斗策略,从简单的攻击闪避到复杂的连招配合,每一个动作都经过反复练习。其机身留存的明显训练“伤痕” 便是有力见证 —— 机身上分布着深浅不一的凹陷与剐蹭痕迹。这些 “伤痕” 虽多为皮外伤,却清晰记录着研发团队在技术打磨过程中付出的心血与努力。
宇树科技董事王其鑫5月25日晚间在央视直播中介绍:“让机器人学会一套动作,不是一件容易的事情。现在我们其实都依靠AI的技术手段来让机器人学习。首先动作捕捉会基于一些专业的格斗运动员,(根据)他们的动作捕捉数据,让机器人在虚拟的世界里来学习这些动作。”
另外一位专家Jean也推测,宇树应该也针对拳击中特定的场景进行专门的算法优化。针对格斗场景进行了特定的动态平衡补偿算法和抗干扰传感器融合方案,提升机器人在对抗中的容错率。
有网友指出,传统遥控控制方法像提线木偶,而宇树的机器人明显有着“肌肉记忆”。通过强化学习,G1能自主探索最优平衡策略,快速击打后回正。这种“自进化”能力,使其在擂台缠斗中展现出远超预判的稳定性:即便被撞击也能通过躯干扭转快速复位。
▍结语与未来
这场被主持人称为“科普展示赛”的格斗秀,实则是人形机器人技术的压力测试场。
在12回合的对抗中,宇树G1暴露了动态运动控制与实时感知的不足、动态控制延迟、传感器噪声干扰等问题,即便在人类遥控操作之下机器人也会遇到“意外情况”。比如主动攻击的机器人反而扑空、失去稳定性倒地,机器人退后寻找角度,却意外被擂台围绳缠住;两个机器人在缠斗当中意外卡住,最终裁判出手将其分开…….
但正是这些技术细节,却也验证了抗冲击结构、多模态感知协同等技术持续创新设计的可行性。正如一位投资人赛后所言:“擂台上每一声金属撞击,都是行业迈向实用化的一记重锤。”
“娱乐化赛事是技术商业化的催化剂。”另一位投资人也指出。正如F1赛车推动汽车技术革新,机器人格斗正在催生新型传感器、高密度电机等产业链创新。
或许正如有网友所说:“今天在擂台上测试的,不是机器人的战斗能力,而是人类与智能体共存的未来范式。当G1从擂台走向工厂、家庭、救援现场,人形机器人这场始于娱乐的技术狂欢,终将在现实中找到它的终极意义。”
(文:机器人大讲堂)