
项目简介

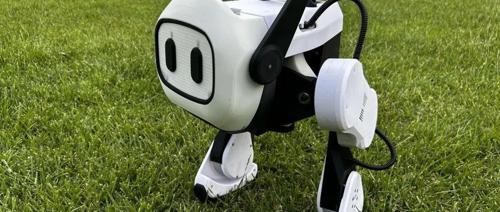
Unitree Qmini 是一款完全开源的低成本双足机器人,完全可以通过个人用户进行3D打印制作。这款机器人专为爱好者、教育工作者和研究人员设计,Qmini让用户能够快速入门并以模块化、类似乐高的方式组装自己的机器人。它为进入机器人领域提供了一个可获取且经济实惠的切入点,加速了创新,并为全球机器人生态系统的发展做出了贡献。
完全开源
硬件:
-
• 完整的物料清单(BOM) -
• 电气系统框图 -
• DIY指南
机械结构:
-
• 所有机械部件的STEP文件 -
• 组装SOP(标准作业程序)
软件:
-
• URDF模型 -
• 核心软件栈:RoboTamer4Qmini -
-
一站式零部件采购
得益于全面的开源资源,开发者可以轻松获取所有所需组件。整个机械结构都可以3D打印,几乎不需要定制加工。打印完成后,只需使用Unitree高可靠性的8010电机和标准电池组,即可在3到5小时内完成组装。

平衡性能与可扩展性
Qmini集成了11个Unitree 8010电机,这是在各种商业机器人平台上经过验证的执行器:
-
• 10个电机驱动机器人的主要运动系统 -
• 1个电机位于颈部,用于自定义扩展
这种模块化设计鼓励开发者设计和原型化自己的扩展功能——增强功能性、美观性或互动性。
开发者友好设计
秉承优秀工具应易于使用的理念,Qmini的设计注重简洁性和成本效益。该平台支持一系列经济实惠的控制板,默认提供树莓派4代B型作为参考控制器。开发者也可以根据自己的具体需求或项目选择其他控制器。
多样化的应用
Qmini适用于多种使用场景:
-
• 个人爱好者 – 在家中3D打印、组装并编程自己的机器人 -
• STEM教育 – 非常适合机器人竞赛、实验室实验和毕业设计项目 -
• 研究机构 – 用于测试动态步态、运动控制和AI算法的紧凑型平台 -
• 互动娱乐 – 准备在动画、舞台表演或其他创意科技体验中进行表演
项目链接
https://github.com/unitreerobotics/Qmini/blob/main/README.md
扫码加入技术交流群,备注「开发语言-城市-昵称」
(文:GitHubStore)