

“
截止目前,Motorevo签约订单已经超6000万,全年预计超1亿元。
作者|机器人开放社区
本轮融资将用于公司产线扩充和营运资本补充,推动其一体化关节模组迈向规模化商用。
Motorevo于2023年在无锡成立,定位为“新一代机器人一体化关节通用平台”,将减速机、电机、传感器、驱动器进行一体化集成,打造满足新一代机器人场景需求的解决方案。聚焦于机器人关节模组、电机、减速器的研发和生产。
在商业落地上,已应用于乐聚机器人、腾讯RoboticsX、北京大学、浙江大学、MIT等多家企业、高校与研究机构的产品中。截止目前,Motorevo签约订单已经超6000万,全年预计超1亿元。
在创始团队上,创始人兼CEO陈万楷毕业于华中科技大学学士、墨尔本大学硕士、吉林大学博士,曾在中国电子科技集团海洋信息技术研究院和浙江省北大信息技术高等研究院从事机器人研发工作,涉及水下机器人、四足机器人、人形机器、服务机器人等种类,负责机器人的伺服关节、机身、腿部传动结构等部分设计。曾设计的多款水下机器人曾获国资委办公厅颁布的奖项、德国IF产品奖等。
Motorevo首席科学家刘春宝,为吉林大学“唐敖庆学者”领军教授、博士生导师,多年从事于复杂机电系统与智能化方向研究;硬件负责人刘彦禹、算法负责人郑淳馨等则分别在电机设计、控制算法领域拥有深厚积累。
团队的其他人员来自吉林大学、华中科技大学、厦门大学、香港科技大学、中南大学的90后组成。目前,Motorevo团队规模保持在30人左右,其中研发人员占比超50%。
创始人兼CEO陈万楷表示,当前机器人关节行业存在三大顽疾:其一,标准体系空白,导致参数虚标乱象频发,一些厂商标称的扭矩、寿命数据与实际表现相差甚远;其二,从实验室到商用的过程中,关节的可靠性、稳定性与一致性不足;其三,能量密度与成本矛盾突出,客户希望关节的能量密度和扭矩密度能够更高,但随之而来的就是居高不下的成本。
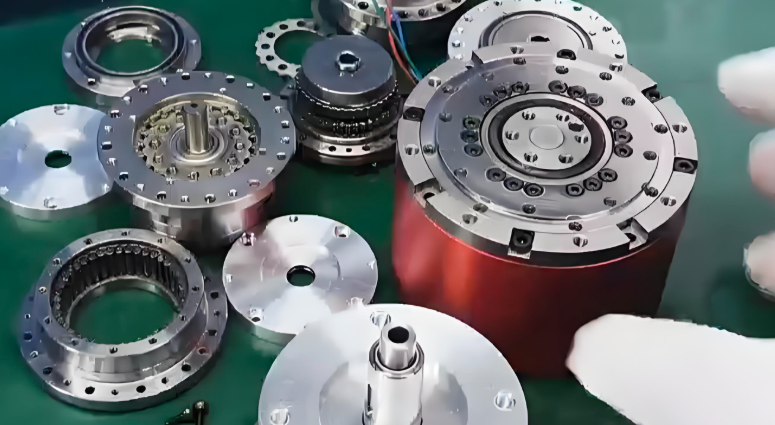
值得关注的是,Motorevo在产品设计上所打造的是一体化关节将减速机、电机、传感器、驱动器一体化集成,不仅优化了结构设计、减少整体重量,还提升能力密度、极大提高空间利用率。
目前,通过研发PA系列行星伺服关节、HA系列谐波伺服关节、CA系列摆线伺服关节等产品,Motorevo构建了覆盖2Nm至400Nm扭矩范围的标准化产品矩阵。其中,PA系列产品峰值扭矩密度达210Nm/kg,超越国内某头部机器人公司关节的189Nm/kg。相较于市面上同类产品,Motorevo的产品做到了质量更轻,扭矩更高,响应更快,价格更低。
(文:机器人开放社区)