

在人形机器人的众多技术环节中,旋转关节作为其核心部件之一,不仅关乎到机器人的运动性能,还直接影响到机器人的制造成本与商业化进程。相关调研机构预测,得益于人形机器人产业爆发式增长。未来几年内,人形机器人旋转关节将保持两位数的高速增长。
▍旋转关节三大技术路线:刚性、弹性与准直驱驱动器
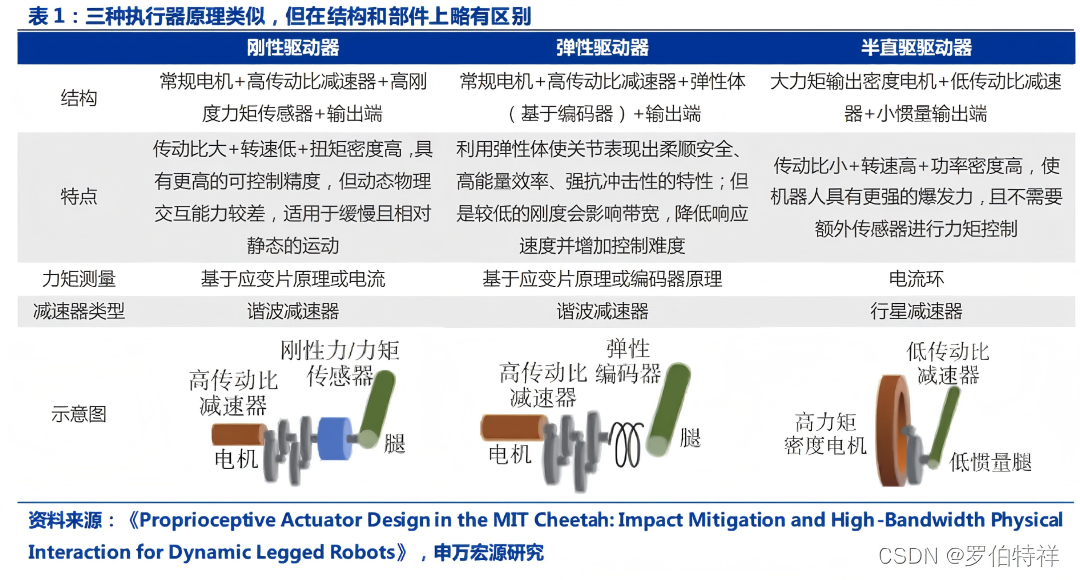
旋转关节的技术路线主要包含刚性驱动器、弹性驱动器以及准直驱驱动器(QDD)这三种类型。
图片来源
刚性驱动器凭借高扭矩输出与高精度的特性,在早期人形机器人研发进程中发挥了关键作用,并长期占据主导地位。该驱动器设计架构简洁,能够为机器人关节提供稳定且强劲的动力支撑,保障机器人在执行复杂任务时具备高度的精确性与可靠性,满足各类严苛的作业需求。
弹性驱动器通过在关节内部引入弹性元件,大幅提升了关节的柔顺控制能力。此设计使机器人在与外部环境交互时,能够更为灵活地适应各类复杂工况,有效降低因碰撞或冲击而产生的损害,进而提高机器人的安全性与环境适应性。然而,弹性驱动器的控制算法相对繁杂,硬件成本亦较高,需要借助精确的力学建模以及先进的控制策略方可实现其柔顺控制功能,这在很大程度上制约了其产业化应用的推进。截至目前,弹性驱动器尚未在人形机器人领域实现大规模推广应用。
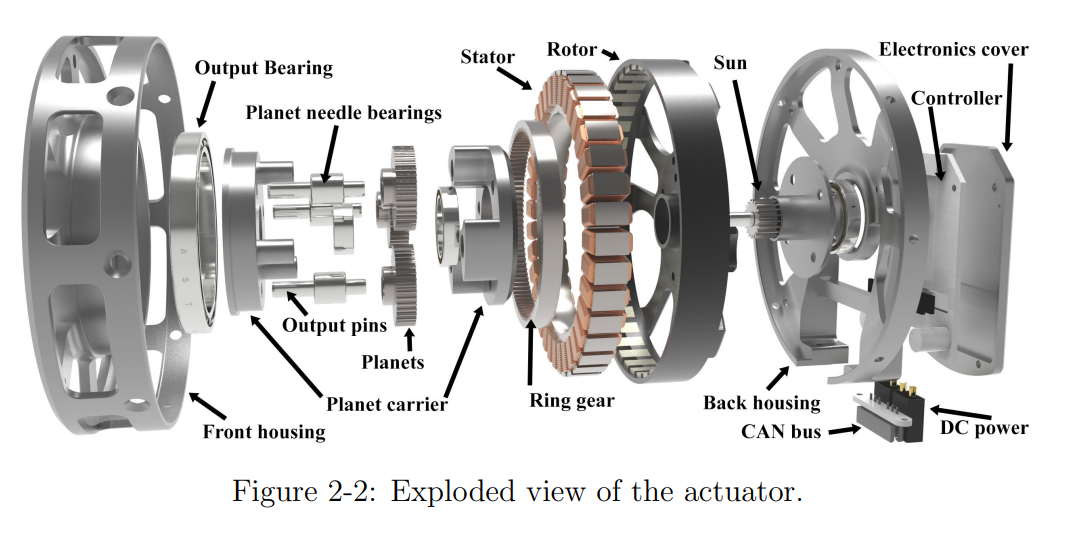
MIT准直驱驱动器组成结构
准直驱驱动器(QDD)巧妙融合了刚性驱动器与弹性驱动器的优势,成为近年来人形机器人旋转关节的主流技术方案。QDD驱动器通过优化结构设计与控制算法,在确保关节性能的前提下,有效降低了制造成本与系统复杂度。它采用低减速比的减速器,使整体结构更为紧凑,同时利用电流环进行力控,节省了力矩传感器的使用成本。
▍电机:旋转关节的动力核心
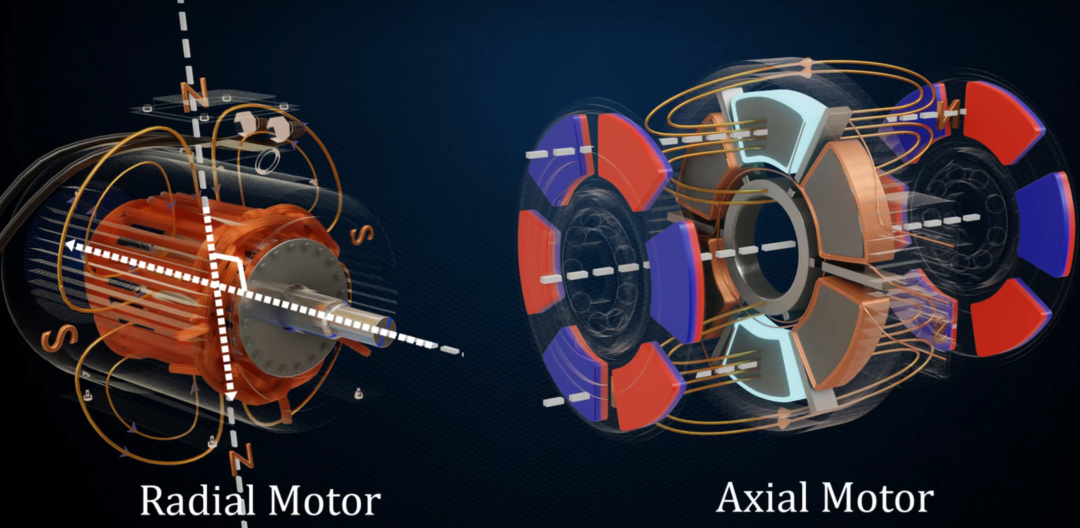
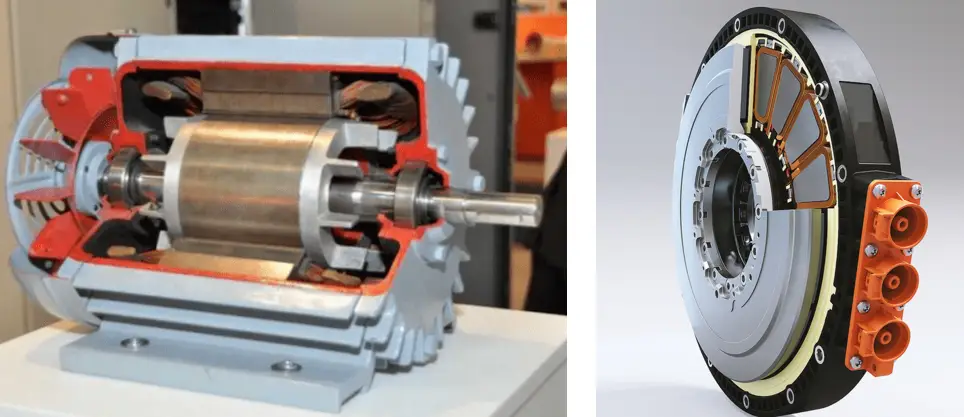
电机作为旋转关节的动力源泉,其性能优劣对人形机器人的运动能力与效率起着决定性作用。人形机器人对电机性能要求严苛,需具备大扭矩输出、高动态响应、低转动惯量以及轻量化等特性。在此情形下,无框力矩电机凭借低速大力矩、体积小巧、结构紧凑等优势,成为人形机器人旋转关节的主流之选。无框力矩电机摒弃了传统机壳,仅保留定子和转子,这种设计使电机配置更为灵活,安装更加便捷,尤其契合高集成度设计需求。

FMC无框力矩电机
与此同时,轴向磁通电机凭借高扭矩密度和高效率的特点,展现出广阔的发展前景。轴向磁通电机采用盘式结构,使得电机体积更薄,功率密度和效率更高,特别适用于对扭矩密度和效率有极高要求的人形机器人应用场景。随着技术的持续进步与成本的逐步降低,轴向磁通电机未来有望在人形机器人领域获得更广泛的应用。
▍减速器:旋转关节的关键传动部件
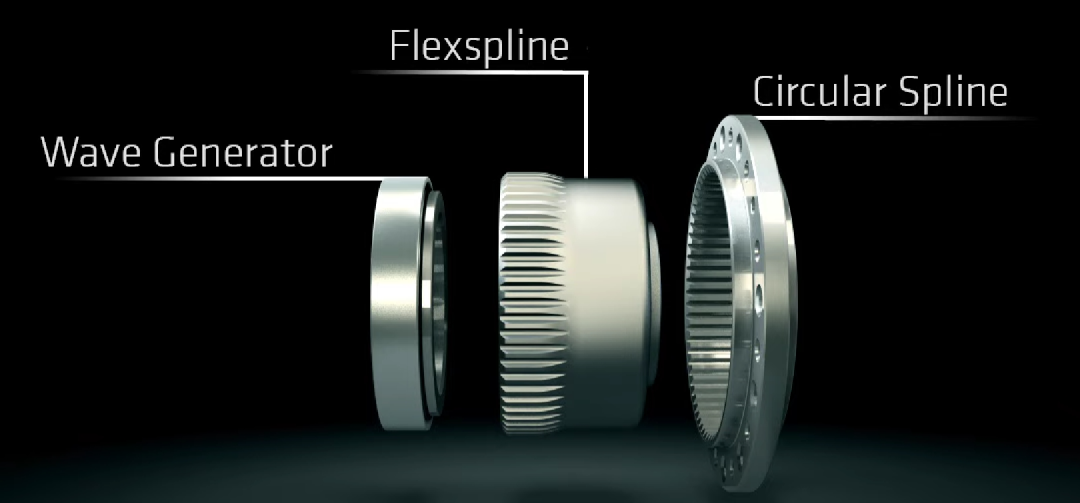
减速器在旋转关节中承担着关键传动部件的角色,其性能直接影响关节的扭矩输出、精度和寿命。人形机器人旋转关节主要采用谐波减速器和行星减速器两种类型。
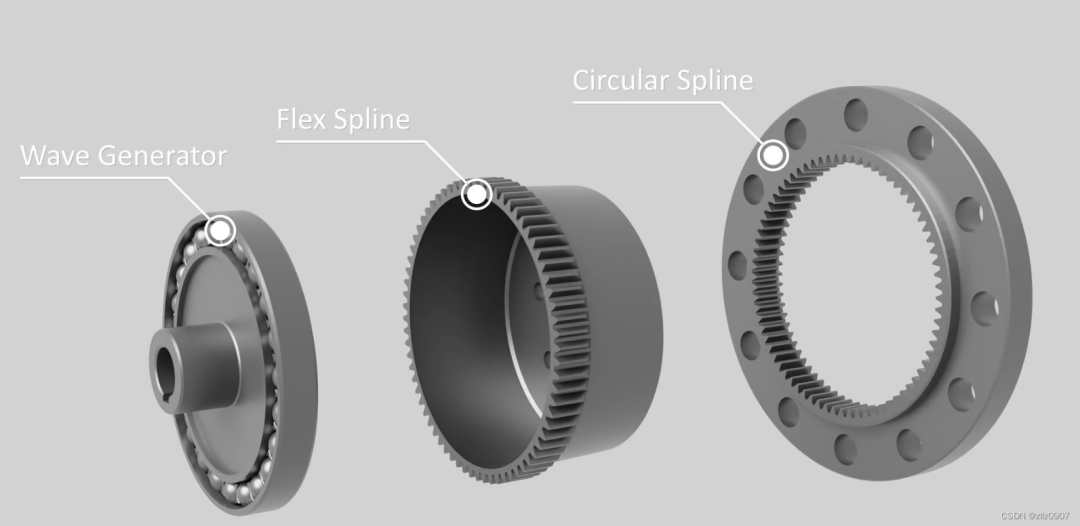
谐波减速器以体积小、高精度、高减速比的特点,在需要大扭矩、高精度且空间受限的关节中得到广泛应用。谐波减速器采用柔性结构实现机械传动,尽管刚性稍显不足,但能够满足人形机器人对高精度运动控制的需求。
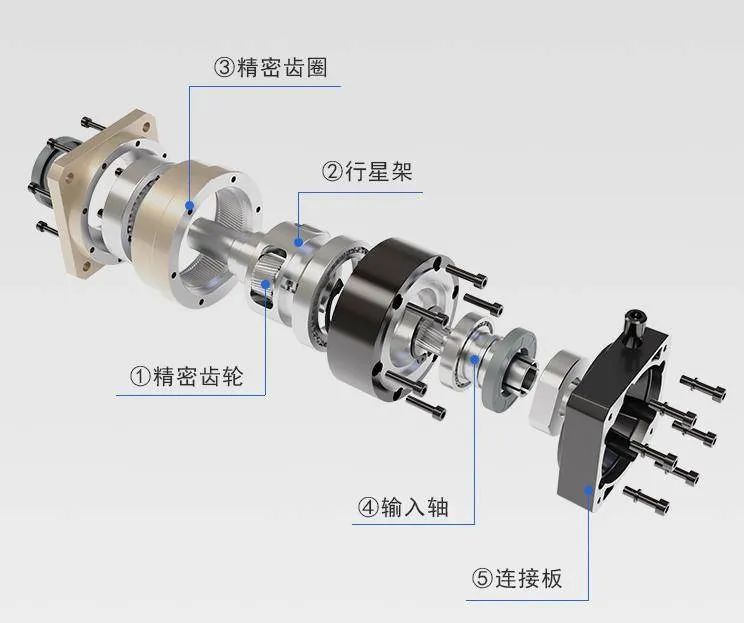
行星减速器则凭借结构简单、价格亲民、刚性和耐磨性好的优势,在要求高效率、低成本且对空间大小不敏感的关节中得到应用。行星减速器通过多级齿轮传动实现减速,虽然精度相对较低,但能够满足人形机器人对基础运动控制的需求,并有效降低制造成本。
目前,谐波减速器和行星减速器在人形机器人旋转关节中呈现出互补态势,共同满足不同关节的需求。
▍传感器:旋转关节的感知元件
人形机器人需感知关节的力/力矩信息以实现精确的运动控制,这主要依赖于力/力矩传感器和电流环传感器。

力/力矩传感器通过直接测量关节的力/力矩,实现高精度的柔顺控制。该传感器能够提供准确的力反馈信息,使机器人能够依据环境变化实时调整运动策略,提升运动的安全性和稳定性。然而,力/力矩传感器成本较高,且对安装位置和精度有严格要求,这在一定程度上限制了其应用范围。
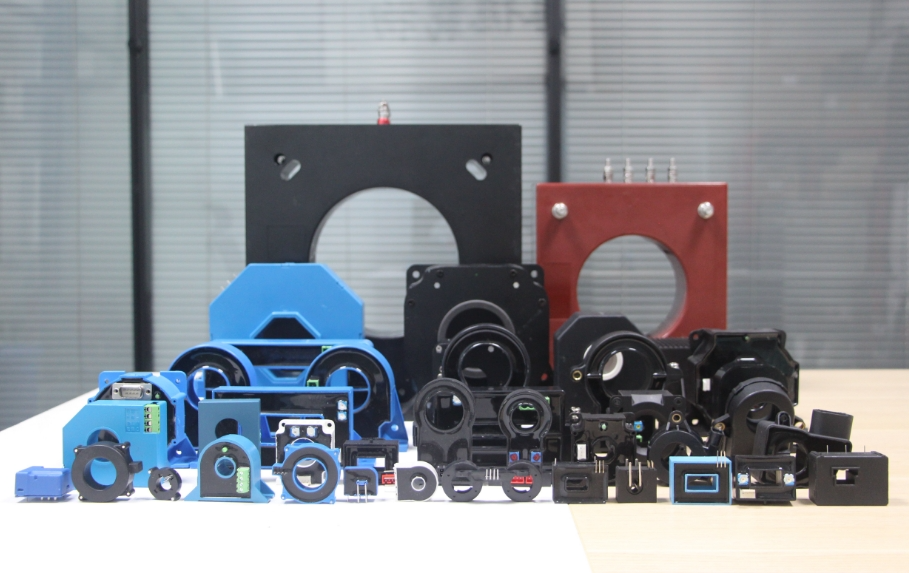
电流环传感器则通过估算关节电流来间接测量力/力矩,成本较低但精度有限。电流环传感器利用电机的电流与力矩之间的线性关系进行估算,虽无法达到力/力矩传感器的精度水平,但在对成本敏感的应用场景中仍具备一定优势。目前,根据应用场景的不同,人形机器人旋转关节中两种传感器均有应用。
▍人形机器人旋转关节:核心部件竞争全景透视
当前,人形机器人旋转关节市场正处于多元化竞争的蓬勃发展阶段,电机、减速器、传感器等核心部件领域的竞争态势尤为激烈。
在电机领域,国内外企业竞相角逐,市场竞争格局日趋白热化。国内步科股份、昊志机电、伟创电气等企业,在无框力矩电机领域取得了令人瞩目的突破。这些企业通过持续加大研发投入、精细优化生产工艺等举措,不断提升无框力矩电机的性能表现与质量水平,有力推动了该技术的国产化进程,有效打破了国外企业在这一领域的技术壁垒,增强了国内人形机器人产业的核心竞争力。
与此同时,轴向磁通电机领域也展现出强劲的发展潜力。尽管当前产业化程度尚显不足,但盘毂动力、小象电动等企业已在该领域前瞻性布局,可以预判的是未来市场竞争将更加激烈。
减速器领域,哈默纳克、绿的谐波等国内外企业占据主导地位,竞争格局相对稳定。
哈默纳克作为全球谐波减速器市场的领军企业,凭借深厚的技术积淀、先进的生产工艺以及严格的质量管控体系,其产品以高精度、高可靠性、长寿命等显著优势,赢得了全球市场的广泛认可与良好口碑。

绿的谐波作为国内谐波减速器市场的佼佼者,始终将技术创新与市场拓展置于重要位置。通过持续投入研发资源,不断优化产品性能,积极开拓国内外市场,其市场份额逐步扩大,品牌影响力日益提升,成为国内减速器产业发展的重要推动力量。此外,行星减速器领域同样竞争激烈,中大力德、纽氏达特等国内企业凭借高性价比的产品,在国内市场占据一定份额,并与国际品牌形成有力竞争,共同推动着行星减速器技术的进步与发展。
六维力测量技术最初因航空航天飞行器研究领域的需求而兴起。当时,在飞行器内部安装的六维力传感器,用于精确测量飞行器的空气动力学特性,涵盖升力、阻力、侧向力、俯仰力矩、偏航力矩及滚转力矩这六个维度,为飞行器的研发提供了关键的数据支持。
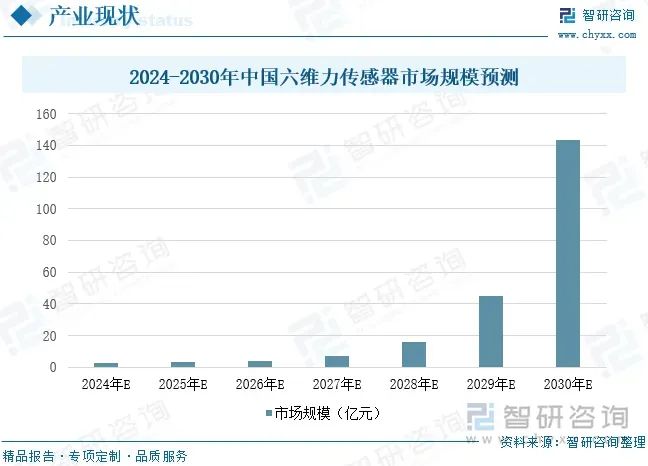
2024-2030年中国六维力传感器市场规模预测(单位:亿人民币)数据来源:智研
当下,六维力传感器应用场景广泛。在汽车行业,它被应用于碰撞测试以及轮毂、座椅等零部件的测试环节;在航空航天、生物力学、医疗、科研实验、机器人与自动化等诸多领域,六维力传感器同样发挥着重要作用。其中,在机器人领域的应用占比超过50%。2024年力传感器市场出货量快速攀升,特别是在人形机器人领域,六维力控已成为标配趋势。
价格方面,外资品牌的六维力传感器单个产品均价约4 万元,国产产品均价约 2 万元,但其实际生产成本通常仅数千元。部分企业如鑫精诚的六维力传感器价格已低至 2000 元/台。鉴于下游应用需求的迅猛增长,六维力传感器价格未来存在较大下降空间。
从市场格局来看,六维力传感器市场集中度较高。美国ATI、宇立仪器、蓝点触控、坤维科技等企业凭借技术优势与市场份额,目前处于行业第一梯队。值得一提的是,国产头部厂商在串扰、温漂等核心性能指标上,已基本能够与国外厂商相抗衡。
▍结语与未来:
从产业发展来看,人形机器人是工业自动化领域的新兴方向,具有很大的发展潜力,有望成为颠覆产业的新兴力量。人形机器人未来市场空间存在增长可能性,这一趋势会带动电机、电控、减速器以及六维力传感器等关键产品的需求,为工业自动化板块带来新的发展契机。
在产业发展过程中,人形机器人整机厂在关节的定义和设计上拥有主导权。轴向电机具有高功率密度、高扭矩密度和高效率等特性,与人形机器人的部分需求相契合,随着技术持续进步,其应用范围推测会进一步扩大。
减速器环节技术门槛较高,具备技术优势的龙头企业有望从人形机器人需求增长中受益,而且行星减速器与谐波减速器并非相互替代关系,二者会依据不同需求进行搭配使用。
六维力传感器目前市场规模相对有限,但人形机器人若实现一定规模的发展,会为其带来需求增长的机会,同时该行业技术要求高、研发难度大,市场格局相对集中,龙头企业凭借技术积累和产品优势将更具竞争力。
(文:机器人大讲堂)