
这是美国麻省理工学院和东北大学的研究团队日前在机器人领域顶级期刊《Science Robotics》上发表的最新成果,让看似矛盾的设想变成了现实。让软体机器人第一次拥有了连续传递扭矩的能力!
长期以来,软体机器人领域面临着一个根本性的悖论:要么像章鱼触手一样柔软安全但无法传递扭矩,要么像传统机械臂一样刚硬有力但存在安全隐患。这项研究首次打破了这个“非软即硬”的二元对立,通过一种被称为TRUNC(Torsionally Rigid Universal Coupling,扭转刚性万向接头)的机械超材料,实现了软体机器人连续传递扭矩的能力。更令人惊讶的是,这种新型软体机械臂在扭转方向上的刚度是弯曲方向的52倍,真正做到了”该软的地方软,该硬的地方硬”。
▍从自然界汲取灵感:植物茎秆的智慧
研究团队的突破性思路来自于对自然界的观察。在漫长的进化过程中,许多植物已经掌握了在不同方向上展现不同刚度的秘密。比如,某些植物的茎秆和叶柄通过调整自身的几何形态参数,实现了扭转刚度和弯曲刚度之间的巨大差异,这让它们既能在风中优雅摇曳,又能在需要时保持稳固。
受此启发,研究人员没有从材料本身的性质入手,而是选择了一条更加巧妙的路径——通过结构设计来实现选择性柔顺。他们基于轴向点群对称性理论,设计了一种特殊的机械超材料结构。这种结构采用了2*N对称模式,在赤道处保持了连接两极的结构,使其在扭转方向上具有刚性。
具体来说,TRUNC有两种变体:赤道型(Equatorial)和桁架型(Truss)。赤道型在其赤道处有一圈关节,结构相对简单;桁架型则在赤道两侧各有一圈关节,这种双层结构允许单元内部产生剪切变形。实验数据显示,赤道型TRUNC的扭转-弯曲刚度比为11,而桁架型更是高达52。这意味着,当你试图扭转它时,它会表现得像钢铁一样坚硬;而当你弯曲它时,它又会像橡胶一样柔软。
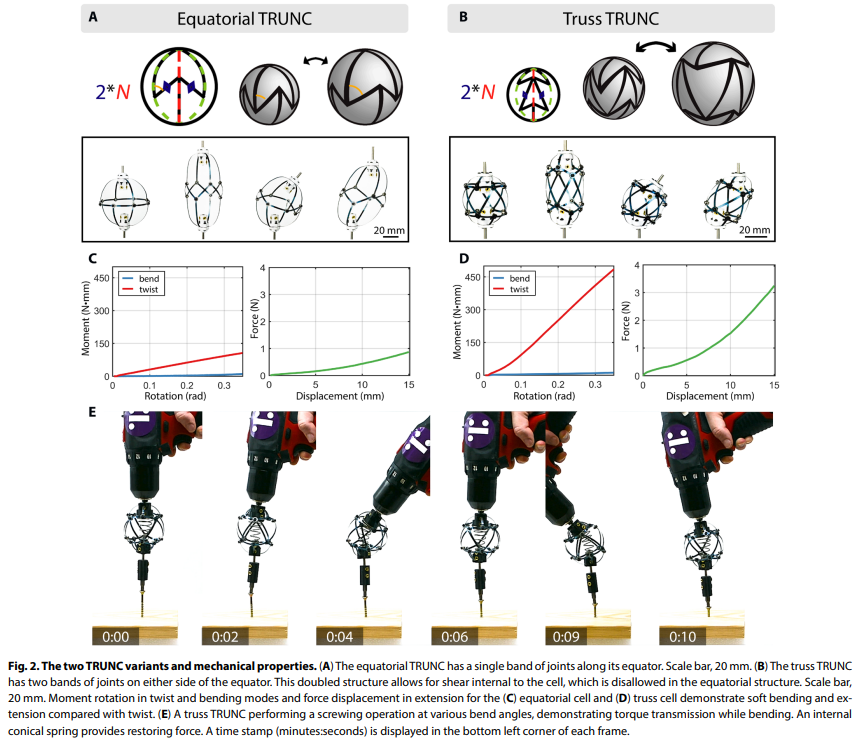
为了验证这种设计的实用性,研究人员将一个桁架型TRUNC连接到电钻上,在不同的弯曲角度下成功地将螺丝钻入了桦木板。即使在45度的弯曲状态下,扭矩传递效率仍能保持85.7%,这个数字远超传统的柔性联轴器。更重要的是,在超过6800次的循环测试中,这些结构在承受超过10%应变的情况下依然没有出现故障,展现出了优异的疲劳抗性。
▍巧妙的组合:从单个关节到复杂系统
单个TRUNC关节的优异性能只是开始。研究团队展示了如何通过串联和嵌套的方式,将这些基本单元组合成更复杂的系统。当多个TRUNC串联连接时,它们形成了一种新型的柔性传动轴,能够沿着弯曲的路径传递旋转运动和扭矩。与传统的柔性传动轴不同,TRUNC传动轴还能够伸缩——当被拉伸20%长度时,仍能保持83.6%的原始扭转刚度。
更令人印象深刻的是嵌套设计。由于TRUNC基于球形几何结构,它们可以像俄罗斯套娃一样轻松嵌套,形成同心的多层结构。研究人员展示了一个双层嵌套的柔性传动轴,内外两层可以独立旋转,实现了通过同一弯曲路径传递多个独立扭矩的能力。在演示中,他们通过切换内外轴的输入扭矩,成功地独立控制了两个指示表盘,证明了这种设计的实用性。
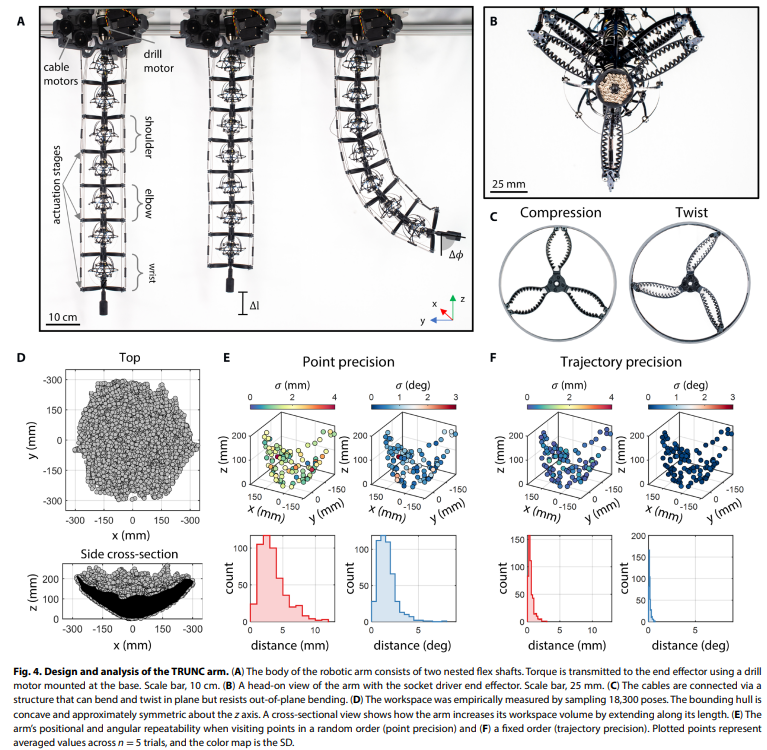
基于这些创新设计,研究团队构建了一个完整的软体机械臂系统。这个机械臂采用了巧妙的双层设计:内层是桁架型TRUNC传动轴,负责将基座电机的扭矩传递到末端执行器;外层是赤道型TRUNC,用于引导控制机械臂运动的驱动线缆。整个系统使用了9个伺服电机来控制线缆长度,通过改变线缆张力来实现机械臂的弯曲和压缩。
▍理论突破到实际应用:三个令人惊叹的演示
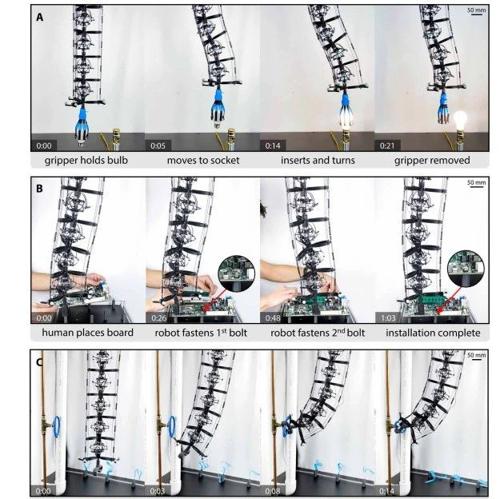
为了展示这种新型软体机械臂的实用价值,研究团队设计了三个具有代表性的任务演示,每一个都展现了传统软体机器人难以完成的能力。
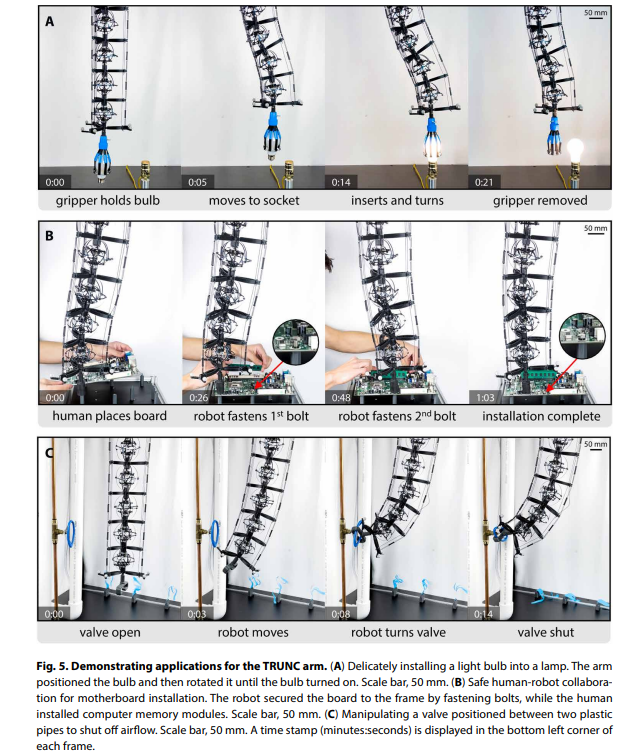
第一个任务是安装灯泡。机械臂使用商用的万能灯泡更换器作为末端执行器,首先将灯泡定位到灯座上方,然后降低高度将其插入。这个看似简单的任务实际上包含了多个技术难点:需要精确的位置控制、适当的插入力,以及最关键的——连续旋转能力。机械臂的柔顺性使其能够被动对齐,补偿轻微的位置偏差,成功完成了2.5圈的旋转,点亮了灯泡。
第二个演示更具挑战性——与人类协作安装主板。在这个场景中,人类工作者首先将主板放置在支架上并预紧螺栓,然后机械臂接手完成最终的紧固工作。每个螺栓需要旋转7.75圈才能完全紧固。在机械臂工作的同时,人类可以在旁边安装内存条,展现了软体机器人在人机协作场景中的安全性优势。这种并行工作模式大大提高了整体效率,同时避免了传统刚性机器人可能带来的安全隐患。
第三个演示模拟了一个更加复杂的工业场景——在狭窄空间中操作阀门。机械臂需要在两根管道之间伸入,找到并旋转一个截止阀。使用3D打印的扳手作为末端执行器,机械臂成功地完成了3.5圈的顺时针旋转,关闭了阀门。这个任务不仅需要在受限空间中的灵活运动,还需要在操作过程中适应扳手与阀门中心的对准偏差,充分展现了软体机械臂的环境适应能力。
为了实现这些复杂的操作,研究团队还开发了一个基于深度神经网络的逆运动学模型。他们收集了18,300组机械臂配置和末端执行器姿态的数据对,训练了一个三层全连接神经网络。训练后的模型能够在0.368毫秒内生成单个路径点,使得实时轨迹规划成为可能。
▍软硬之间的桥梁:开启机器人技术新篇章
这项研究的意义远不止于技术突破本身。长期以来,机器人领域一直在”刚性”和”柔性”之间做着艰难的选择:要么选择强大但危险的刚性机器人,要么选择安全但能力有限的软体机器人。TRUNC技术的出现,第一次真正意义上架起了连接两者的桥梁。
从应用前景来看,这种新型软体机械臂在多个领域都有着巨大的潜力。在仓储自动化中,它可以安全地与人类工人并肩作业,完成需要旋转操作的装配任务;在极端环境中,如核电站维护或深海作业,它的柔顺性和扭矩传递能力使其成为理想的远程操作工具;在医疗领域,这种技术可能催生出新一代的手术机器人,既能提供必要的操作力,又能确保与人体组织的安全交互。
更深层次地看,这项研究展示了机械超材料在机器人设计中的巨大潜力。通过在结构层面而非材料层面实现特定的机械性能,我们可以创造出具有看似矛盾特性的新型机器人系统。这种设计思路不仅适用于软体机器人,也可能为整个机器人领域带来新的设计范式。
当然,这项技术仍有改进空间。目前的系统相对复杂,需要多个电机协同控制;制造成本也相对较高,限制了大规模应用。但正如所有突破性技术一样,随着研究的深入和工程优化,这些问题都将逐步得到解决。
回想起来,谁能想到,解决软体机器人扭矩传递难题的灵感,竟然来自于植物茎秆在风中的摇曳?这再次证明,大自然永远是工程师最好的老师。或许在不远的将来,当你看到一个软体机器人助手正在帮你拧紧松动的螺丝时,别忘了感谢那些在风中摇曳的植物——它们不仅美化了我们的世界,还启发我们创造了更美好的未来。
https://www.science.org/doi/10.1126/scirobotics.ads0548
(文:机器人大讲堂)