
Information Fusion 综述论文:基于视触觉传感器的触觉数据生成与应用
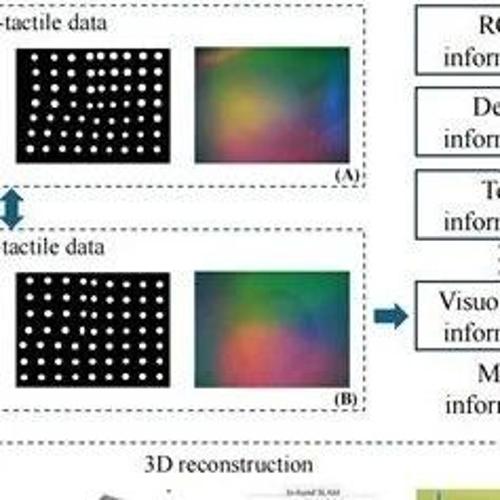
多模态数据集中的视触觉传感器综述论文总结了视触觉信息的生成方法及其应用。文章介绍了基于物理和学习的技术,涵盖了弹性体模拟、光学模拟、标记物运动模拟及跨模态与真实迁移生成方法,并提出标准化评价规则。
多模态数据集中的视触觉传感器综述论文总结了视触觉信息的生成方法及其应用。文章介绍了基于物理和学习的技术,涵盖了弹性体模拟、光学模拟、标记物运动模拟及跨模态与真实迁移生成方法,并提出标准化评价规则。
2025具身智能机器人发展大会将于3月7日在天津召开。本次大会由灵心巧手赞助,将邀请多位专家探讨人形机器人的技术研发、场景应用及产业链合作,并展示最新成果与创新技术。