
Information Fusion 综述论文:基于视触觉传感器的触觉数据生成与应用
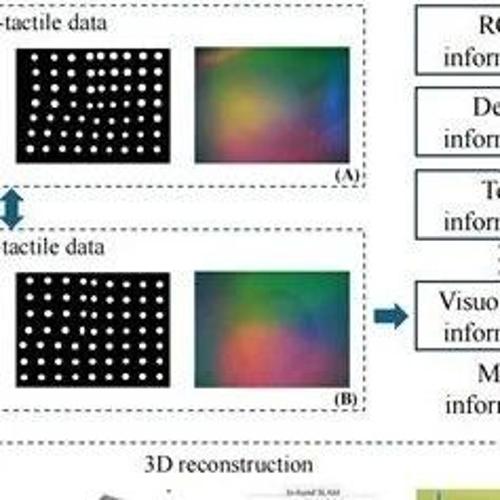
多模态数据集中的视触觉传感器综述论文总结了视触觉信息的生成方法及其应用。文章介绍了基于物理和学习的技术,涵盖了弹性体模拟、光学模拟、标记物运动模拟及跨模态与真实迁移生成方法,并提出标准化评价规则。
多模态数据集中的视触觉传感器综述论文总结了视触觉信息的生成方法及其应用。文章介绍了基于物理和学习的技术,涵盖了弹性体模拟、光学模拟、标记物运动模拟及跨模态与真实迁移生成方法,并提出标准化评价规则。

上海纬钛科技宣布完成近亿元天使及天使+轮融资,用于推进基于视觉的触觉传感技术、手眼协同算法研发及商业化落地。公司致力于打造通用类人机器人末端感知系统,并已与科研机构及制造业客户达成合作,在多个场景实现初步商用验证。
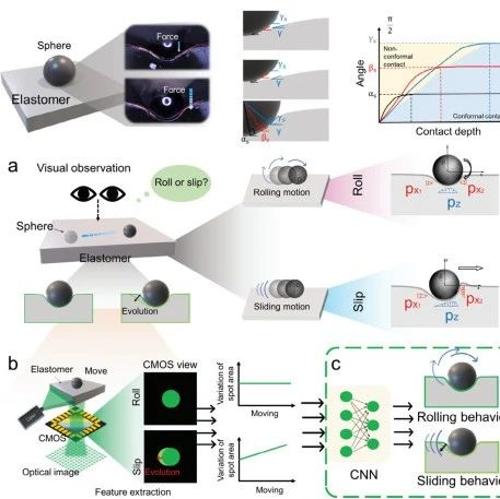
通过光学触觉传感系统实时可视化弹性体表面轮廓变化,结合深度神经网络模型识别接触行为,实现了高精度的软界面变形感知。该方法已在多个领域展现出应用潜力,并成功应用于机器人触觉感知和人机交互中。