
北理工团队借鉴蝗虫跃翔一体特性 研制出具备陆空跨域能力的微小型仿生机器人
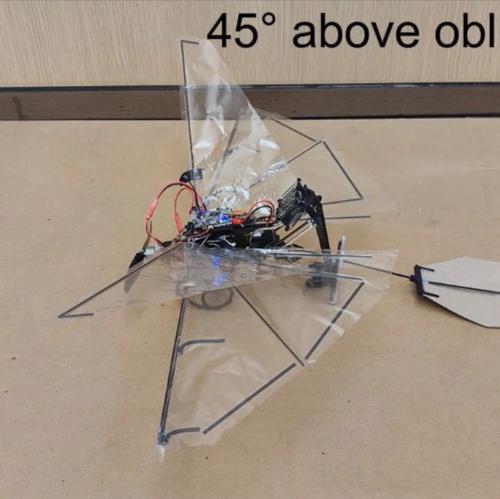
北京理工大学石青教授团队研发出一款模仿蝗虫多模态运动的机器人(LocustBot),融合爬行、跳跃和滑翔三种运动模式。通过单一丝杠电机实现腿足伸展与翼形折叠,结合TD3强化学习算法优化跳跃-滑翔动作策略,在野外环境中展示了良好的适应性和能量利用效率。
北京理工大学石青教授团队研发出一款模仿蝗虫多模态运动的机器人(LocustBot),融合爬行、跳跃和滑翔三种运动模式。通过单一丝杠电机实现腿足伸展与翼形折叠,结合TD3强化学习算法优化跳跃-滑翔动作策略,在野外环境中展示了良好的适应性和能量利用效率。