

在机器人技术蓬勃发展的时代浪潮中,机器人操作的智能化与精准化成为了研究的核心焦点。从工业生产线上的精细装配,到医疗领域的精准手术辅助,再到日常生活中的服务提供,人们对机器人的操作能力寄予了越来越高的期望。然而,现有的机器人操作方法在面对复杂多变的环境和任务时,往往存在诸多局限。在此背景下,上海 AI 实验室联合北京大学等机构重磅推出的 Seer 端到端操作模型应运而生,宛如一颗璀璨的新星,为机器人操作领域带来了全新的曙光与希望。本文将深入剖析 Seer 模型的架构、技术原理、功能特性、应用场景以及使用方法,助力读者全面领略这一前沿技术的魅力与价值。
一、项目概述
Seer 作为一款创新性的端到端操作模型,致力于实现机器人视觉预测与动作执行的深度协同。它巧妙地结合历史信息与目标信号(如语言指令),精准预测未来时刻的状态,并借助逆动力学模型生成高效的动作信号。其基于先进的 Transformer 架构,能够游刃有余地处理多模态输入数据,将视觉、语言和机器人本体信号完美融合。在实际应用中,Seer 表现卓越,在真实机器人任务中,操作成功率相较于当前的 Sota 提升了高达 43%,在控制算法测试基准 CALVIN ABC – D Benchmark 中,平均任务完成长度达到 4.28,远超同类模型,在多种复杂场景下更是展现出了令人瞩目的泛化能力,为机器人在复杂环境下的稳定操作提供了坚实保障。
二、技术原理
1、端到端架构革新
Seer 采用了极具创新性的端到端架构,将视觉预测与逆动力学预测紧密融合。在训练过程中,视觉预测模块和逆动力学模块协同优化,实现了视觉与动作信息的高效利用。与传统的分离式模型不同,这种一体化的设计使得模型能够在训练过程中不断调整和优化视觉与动作之间的关联,从而显著提高动作预测的准确性。例如,在机器人抓取任务中,模型可以根据当前视觉信息预测目标物体的位置和姿态变化,同时结合逆动力学模型计算出最佳的抓取动作路径,实现精准抓取。
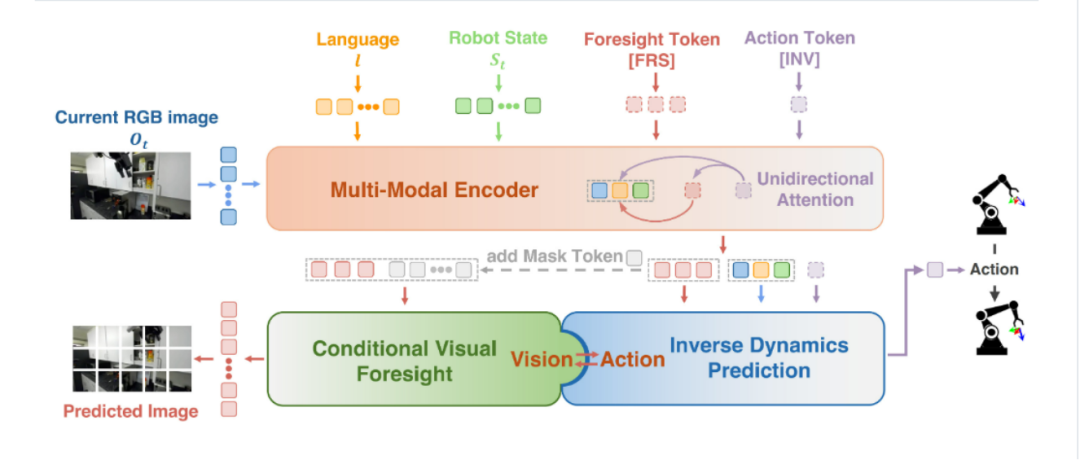
基于强大的 Transformer 架构,Seer 能够有效处理视觉状态和动作信息。Transformer 的多头注意力机制可以捕捉视觉和动作序列中的复杂依赖关系,为模型提供强大的特征提取和表示能力。在处理复杂的机器人操作任务时,如装配线上的零部件组装,它可以同时关注多个零部件的位置、形状和装配顺序等信息,从而生成准确的操作指令。
3、先见与动作令牌机制
Seer 引入了先见令牌(foresight token)和动作令牌(action token)。先见令牌负责预测未来的 RGB 图像,使机器人能够提前“预见”未来的视觉状态,为动作规划提供前瞻性的指导。动作令牌则用于估计当前和预测未来观察之间的中间动作。这两个令牌通过多模态编码器与输入的 RGB 图像、机器人状态和语言令牌深度融合,并借助单向注意力掩码实现信息的深度整合。例如,在机器人导航任务中,先见令牌可以预测前方道路的变化和障碍物的位置,动作令牌则根据这些预测生成相应的移动和避让动作。
4、单向注意力掩码优势
特殊设计的单向注意力掩码是 Seer 的一大技术亮点。它允许动作令牌充分整合过去和未来的预测信息,在多层网络中实现深层次的信息融合。这种设计有效提高了动作预测的准确性和鲁棒性,特别是在面对复杂动态环境时,能够帮助机器人快速做出合理的动作决策。比如在动态障碍物躲避任务中,机器人可以根据过去的运动轨迹和未来可能的障碍物位置变化,及时调整自身的运动方向和速度。
5、大规模预训练与微调策略
Seer 首先在大规模机器人数据集(如 DROID)上进行预训练,通过海量数据学习丰富的视觉和动作先验知识。这些先验知识涵盖了各种场景下的物体特征、动作模式和环境变化规律。在下游任务中,只需利用少量的微调数据对模型进行针对性调整,即可快速适应具体的任务场景和目标。这一策略不仅大大减少了对大量标注数据的依赖,提高了模型的训练效率,还增强了模型在不同任务间的通用性和适应性。
三、主要功能
1、精准动作预测
Seer 能够根据当前的视觉状态和目标,精确预测出适合机器人执行的动作。通过逆动力学模型,它可以详细估计实现目标所需的中间动作序列,确保机器人的操作流畅且准确。在工业机器人的焊接任务中,Seer 可以根据焊接点的位置、焊缝的形状以及焊接工艺要求,精确规划机器人手臂的运动轨迹和焊接参数,实现高质量的焊接操作。
2、智能视觉预测
具备强大的条件视觉预测功能,Seer 可以预测未来一定时间步内的 RGB 图像。这使得机器人能够提前了解环境的变化趋势,更好地规划和调整自身动作。在物流仓储的货物搬运场景中,机器人可以提前预测货架上货物的位置变化和周围环境的动态情况,从而优化搬运路径,避免碰撞和拥堵。
3、高效多模态融合
Seer 能够有效融合视觉、语言和机器人状态等多种模态的信息,实现对复杂任务的深入理解和准确执行。其多模态编码器将不同模态的特征进行有机整合,为动作预测和视觉预测提供全面而准确的上下文信息。例如,在服务机器人执行任务时,它可以结合用户的语音指令、周围环境的视觉信息以及自身的位置和姿态状态,准确地完成诸如物品递送、环境清洁等任务。
4、强大泛化能力
经过大规模机器人数据集的预训练,Seer 展现出了极为强大的泛化能力。无论是在未见场景、新物体出现、不同光照条件下,还是面对高强度干扰时,它都能保持稳定且出色的性能。在医疗机器人辅助手术中,即使面对不同患者的解剖结构差异、手术室内的光照变化和各种医疗设备的干扰,Seer 依然能够准确地辅助医生进行手术操作,为手术的安全和成功提供有力支持。
5、卓越数据效率
得益于大规模预训练学习到的丰富先验知识,Seer 在下游任务中仅需少量的微调数据即可达到良好的性能。这一特性极大地降低了数据采集和标注的成本,提高了模型的应用效率。对于一些数据获取困难或成本高昂的领域,如深海探测机器人、太空探索机器人等,Seer 的这一优势尤为显著,使得这些领域的机器人能够更快地适应新任务和新环境。
四、任务表现
在真实世界中,机器人面临的场景往往充满了复杂性和不确定性。Seer 在处理这些复杂场景时展现出了出色的操作稳定性。在杂乱的仓库环境中,存在着形状各异、摆放无序的货物,以及不断移动的运输设备和人员。Seer 能够快速准确地识别出目标货物,通过对周围环境的实时感知和分析,合理规划机器人的移动路径和抓取动作。即使在光线条件不佳、货物表面存在遮挡或污渍的情况下,Seer 依然能够稳定地完成货物的搬运任务,确保物流流程的顺畅进行。
1、真实世界擦除板任务
在这项任务中,机器人需要 (1) 抓住刷子,以及 (2) 将所有巧克力球扫入簸箕。
演示发现,Seer 能够:
– 擦拭多簇巧克力球。
– 当棋盘上没有任何东西时保持静止。
– 放置额外的巧克力球时,请继续擦拭。
– 放置新巧克力球时,请继续擦拭。
– 擦除所有随机散落的物体。
2、真实世界的 Stack Ups 任务
在这个任务中,机器人需要 (1) 选择中间 杯子,(2) 盖住小杯子,(3) 挑大杯子,(4) 盖住中间杯子。
演示发现,Seer 拥有:
– 较强的跟踪能力和位置泛化能力。
– 在干扰下重新覆盖杯子。
在此任务中,机器人需要 (1) 选择一个 翻转的碗,以及 (2) 将其放在杯垫上。
演示发现Seer 对以下方面很稳健:
– 闪烁的灯光。
– 具有相同形状的干扰。
五、应用场景
1、工业自动化升级
在工业领域,Seer 可以指导机器人进行高精度的汽车部件安装等工作。通过对汽车零部件的精确识别、定位和装配动作规划,提高装配效率和质量,降低生产成本,推动汽车制造等工业产业的智能化升级。例如,在汽车发动机装配线上,Seer 可以帮助机器人准确地安装活塞、曲轴等关键部件,确保发动机的性能和可靠性。
2、服务机器人优化
对于服务机器人,Seer 能够助力其按需将物品准确送达客房,提升客户体验。在酒店、餐厅等场所,服务机器人可以根据客人的需求和环境信息,快速规划最优的配送路径,准确地将物品送到指定位置,提高服务效率和质量。
3、医疗健康革新
在医疗健康领域,Seer 可作为虚拟手术机器人的核心技术,辅助医学生学习和练习手术技能。它可以模拟真实的手术场景,为医学生提供精准的操作指导和反馈,帮助他们提高手术操作水平,缩短学习周期,同时也为远程手术等新兴医疗技术的发展提供了技术支持。
4、物流仓储增效
在物流与仓储行业,Seer 赋能的自动化分拣系统能够快速、准确地将包裹分拣到指定通道。通过对包裹的形状、大小、标签信息等进行识别和分析,结合仓库的布局和物流流程,实现高效的分拣作业,提高物流配送效率,满足日益增长的物流需求。
5、教育行业助力
在教育领域,Seer 可作为教学案例,帮助学生深入理解机器人编程的高级技术和算法。通过实际的操作演示和案例分析,激发学生对机器人技术的兴趣和创造力,培养未来的机器人技术人才。
六、快速使用
对于希望从头开始训练 Seer 模型,或者对其进行微调以适应特定任务需求的用户,官方提供了一套全面且详尽的指导说明,涵盖了环境设置、下游任务数据准备、模型训练以及部署等各个关键环节。
1、安装环境
为确保 Seer 能够稳定运行并实现高效的预训练、微调和推理工作流程,我们需要创建一个独立的隔离环境,这里我们将其命名为 “seer”。具体操作步骤如下:
#Env创建conda create -n seer python=3.10conda activate seer# 第三方依赖包cd ${YOUR_PATH_TO_SEER}pip install -r requirements.txtpip install torch==2.2.0 torchvision==0.17.0 torchaudio==2.2.0 --index-url https://download.pytorch.org/whl/cu121
具体参考:https://github.com/OpenRobotLab/Seer/blob/main/docs/REAL-WORLD_INSTALL.md
2、数据准备
在训练或微调 Seer 模型之前,数据准备是至关重要的一步。用户需要收集相关数据,并按照官方提供的标准流程进行数据格式化和后处理。这不仅有助于提高模型训练的效率,还能确保模型在不同任务中的准确性和稳定性。关于数据准备的详细操作指南,可参考官方文档:https://github.com/OpenRobotLab/Seer/blob/main/docs/REAL-WORLD_POSTPROCESS.md 。
3、快速训练
完成环境搭建和数据准备后,即可开始模型的训练。以下是核心代码示例:
# 环境准备cd ${YOUR_PATH_TO_SEER}conda activate seer# 从 checkpoint 存储库下载相关 checkpoint。对于单节点微调:bash scripts/REAL/single_node_ft.sh对于从头开始的单节点训练:bash scripts/REAL/single_node_scratch.sh
具体参考:https://github.com/OpenRobotLab/Seer/blob/main/docs/REAL-WORLD_FT_SC.md
4、模型推理
当模型训练完成后,就可以进行推理操作,将训练好的模型应用到实际任务中。模型推理的核心代码示例如下:
bash scripts/REAL/deploy.sh具体参考:https://github.com/OpenRobotLab/Seer/blob/main/docs/REAL-WORLD_INFERENCE.md
七、结语
Seer 模型作为上海 AI 实验室、北京大学等机构在机器人操作领域的杰出研究成果,以其先进的技术原理、强大的功能特性和广泛的应用前景,为机器人技术的发展注入了新的活力。尽管目前可能还存在一些技术挑战和应用优化空间,但随着研究的不断深入和技术的持续迭代,相信 Seer 将在未来的机器人领域发挥更加重要的作用,推动机器人在各个行业的广泛应用和深度融合,为人类的生产生活带来更多的便利和创新。
八、项目地址
项目官网:https://nimolty.github.io/Seer
开源仓库:https://github.com/OpenRobotLab/Seer
技术论文:https://arxiv.org/pdf/2412.15109
(文:小兵的AI视界)