

随着微型机器人技术的进步,其在环境监测、灾害救援、军事侦察等领域的应用潜力逐渐显现。然而,当在复杂多变的地形中移动时,微型机器人常常面临跨越高大障碍物和狭窄间隙等诸多挑战。其传统的步行方式往往难以应对这些情况。

而将步行与跳跃相结合的多模态运动方式,能够适应各种不同的环境条件,对于提升地形稳健性具有重要意义。也因此,开发一款结合步行与跳跃能力的多模式微型机器人,对于提升微型机器人在复杂环境中的适应性和移动效率至关重要。
▍开发多模态微型机器人,整合步行与跳跃机制
小型节肢动物通过独特的跳跃机制,能够跨越远超自身体型的障碍物。这些机制通常被归类为闩锁介导的弹簧驱动系统(LaMSA),其特点在于能量加载与释放之间的极端时间不对称。例如,螳螂虾利用过中心扭矩反转机制实现高速捕食攻击,而跳虫则通过释放叉骨状的分段式跳跃附肢实现快速起飞。其他如陷颌蚁、跳蚤、叩头虫和植物虱子等也展现出类似的LaMSA机制。
爬行跳跃平台Tribot
关于小规模LaMSA跳跃机制的研究,此前虽然在各个方面都取得了实质性进展,但在控制跳跃轨迹方面仍存在挑战。为解决这一问题,一种可行的策略是将现有的跳跃机制集成到当前的步行微型机器人平台上。但这需要确保稳健的控制和操作,以实现重复跳跃和着陆,并进行平面内重新定位和动态机动。
目前,虽然在昆虫级机器人中存在一些步行跳跃多模态演示,但在有腿、陆地敏捷微型机器人中,重复跳跃和着陆的能力尚未得到充分探索。具备定位和定向跳跃机制、能够实现精确弹道轨迹的机器人性能,将极大提升机器人在复杂环境中的适应能力和任务执行精度。也正因如此,如何在单一平台上实现高性能步行与跳跃的协同作用,仍是微型机器人研究的关键。
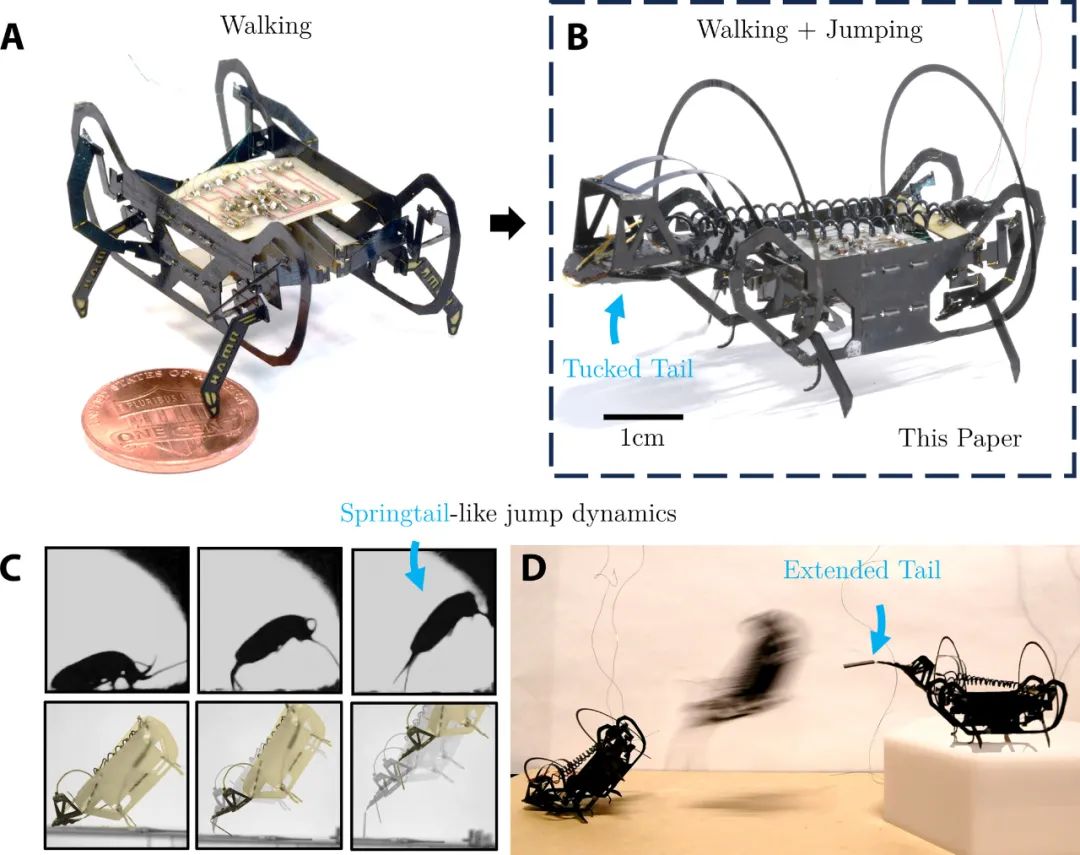
为深入探索厘米级机器人中冲动(跳跃)和非冲动(周期性腿部行走)行为的结合,来自哈佛大学微型机器人实验室的研究团队以哈佛大学此前开发的四足微型机器人(HAMR)为基础,通过引入独立的步行和跳跃机制,开发了一种多模态微型机器人。
四足微型机器人采用扭矩反转弹射机构,实现行走和重复跳跃
该机器人的跳跃机制受到螳螂虾打击附肢中的扭矩反转连杆模型的启发,采用了一种创新的分段式被动跳跃附肢。这种设计不仅能产生高加速度,还提供了在脉冲运动过程中调节与地面撞击的机会,从而提高了机器人的空中稳定性和跳跃性能。
研究团队通过高速视频记录和动态模型推导,优化了关键部件的设计。最终,该机器人以2.2克重量和6.1厘米身长实现了高达1.4米即23倍体长的最大水平跳跃距离,超过了类似大小的昆虫。此外,研究团队还将该机构与灵活的四足微型机器人集成在一起展示了可重复的定向起飞和直立着陆,进行复杂的机动以克服障碍和间隙的能力。该研究不仅为微型机器人在复杂环境中的灵活运动提供了新的思路,还验证了将生物学原理应用于机器人设计中的可行性。

▍LaMSA跳跃机制的设计与实现
研究团队设计了一种受螳螂虾启发的扭矩反向弹射机构作为跳跃机制的核心。该机构通过几何闩锁和接触闩锁实现能量的加载与释放,能够在击打臂尖端达到41.2米/秒的峰值速度。脉冲系统的关键设计在于使用单个执行器驱动两个自由度,从而减轻了重量和操作复杂性。击打臂的摆动角度可达180°,但为了避免直接撞击地面时产生不必要的身体旋转,研究团队在击打臂上增加了“胫骨”和“脚”两个刚性连杆,并通过优化质量分布和机构定位,显著提高了跳跃效率和空中稳定性。
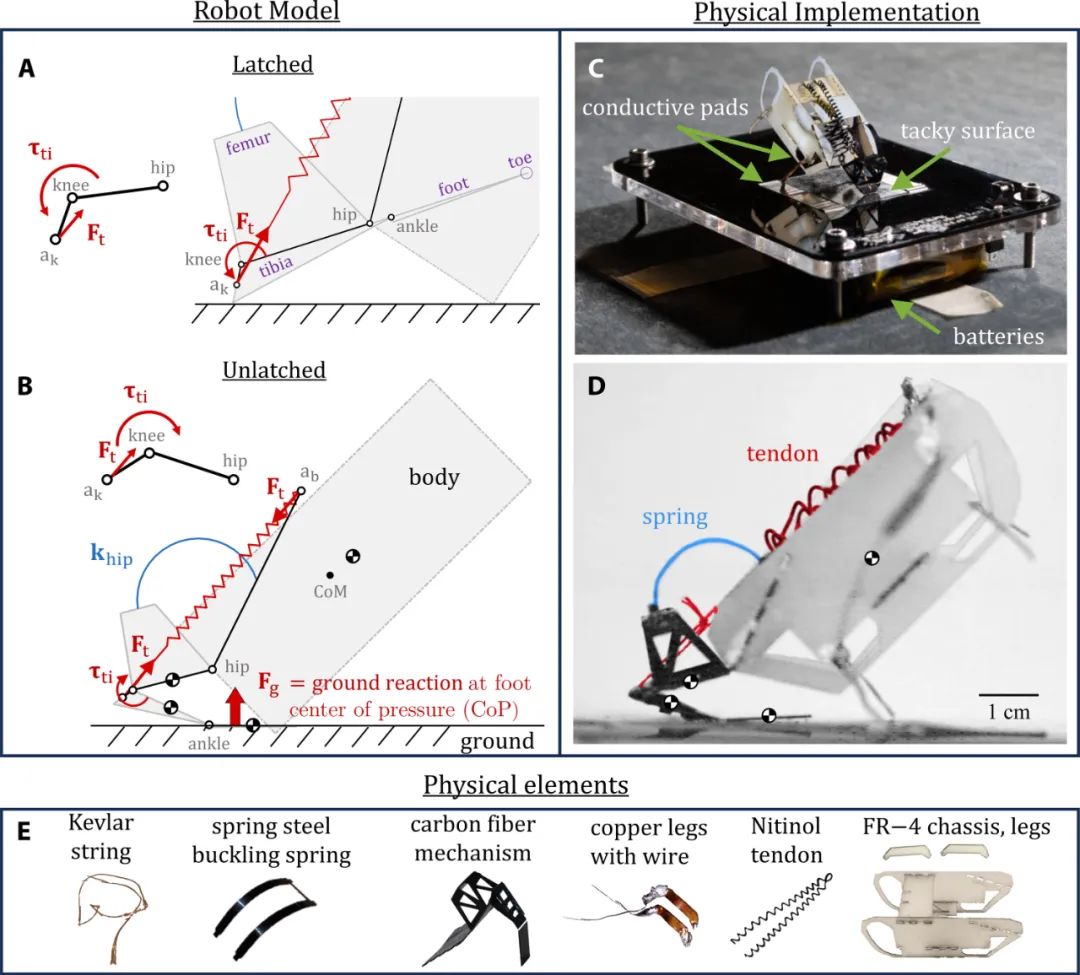
跳跃机构模型显示锁存力学和带有组件故障的物理原型
通过对机器人跳跃过程的高速视频记录和分析,研究团队清晰地观察到跳跃行为可分为能量加载、撞击地面、身体旋转、足部滑动、起飞、空中姿态调整六个阶段,这些阶段与自然界中的跳虫跳跃行为高度相似。通过对比生物学模型,研究团队进一步验证了所设计跳跃机制的有效性和合理性。
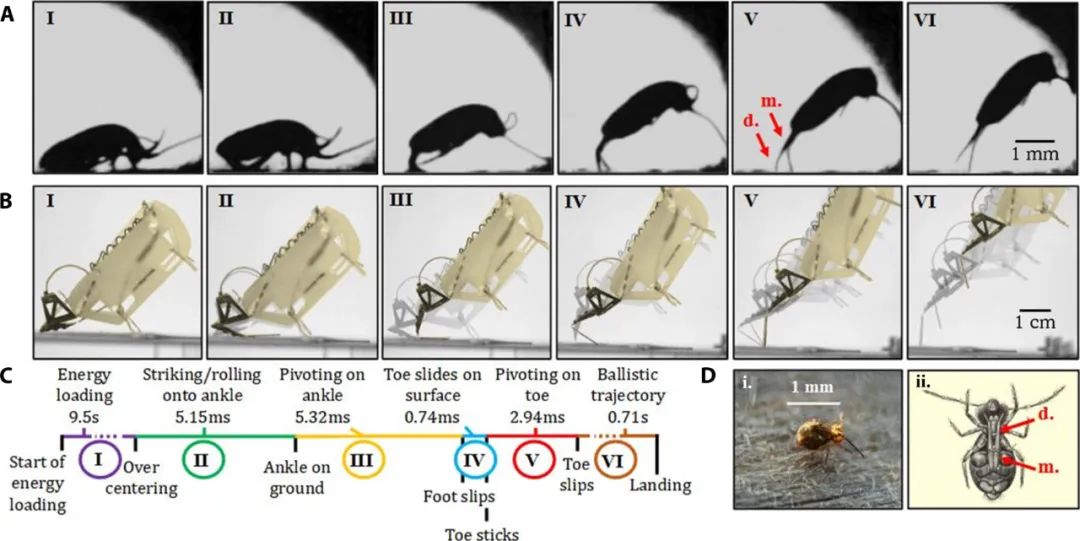
机器人和弹尾并排跳跃的序列,分为六个阶段
为了更深入地理解跳跃机制的动态特性,研究团队对跳跃机制进行了动态建模。该模型描述了从髋部弹簧到踝部弹簧的能量传递过程,并模拟了机器人在不同阶段的动力学行为。通过数值求解器,研究团队成功预测了跳跃轨迹,并验证了模型与实际跳跃行为的一致性。模型显示,踝关节刚度的优化对跳跃性能至关重要,过高或过低的刚度都会导致跳跃效率下降。
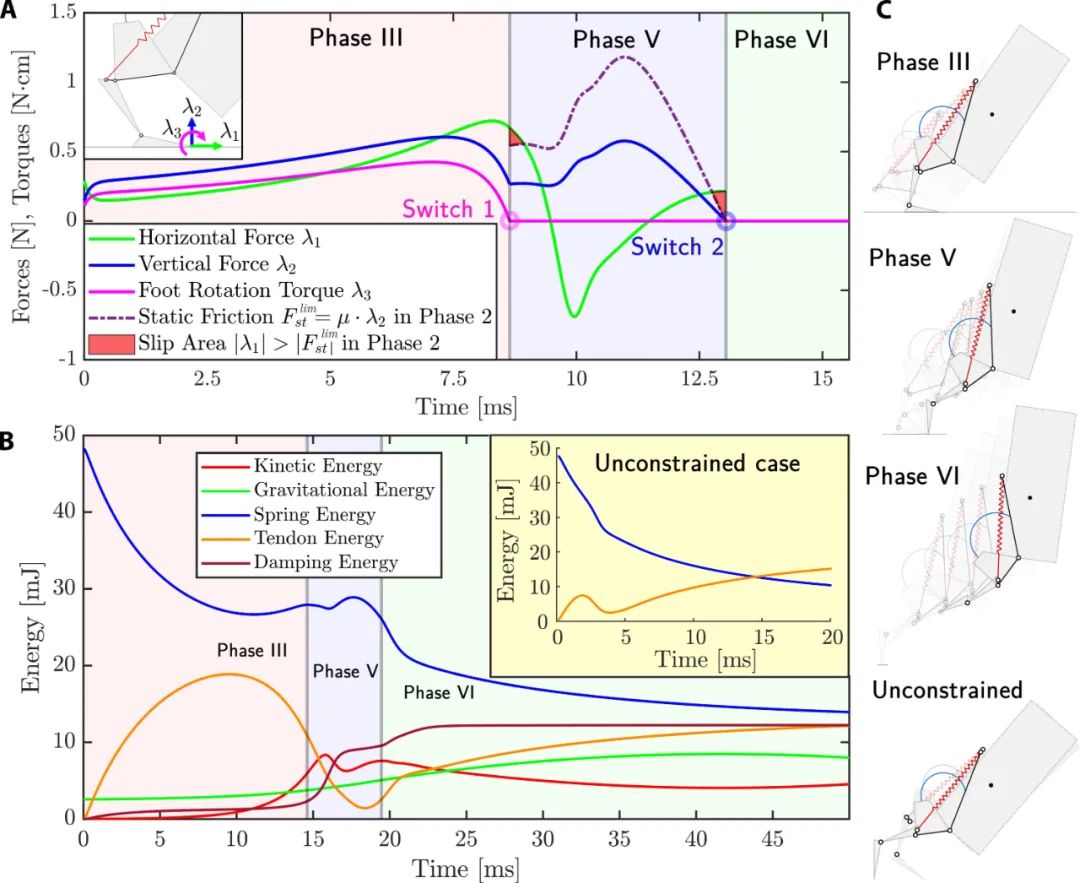
基于约束拉格朗日公式的动态跳跃模型预测跳跃过程中的能量和力量
在动态跳跃建模的基础上,研究团队进一步对足部几何形状、踝关节刚度和胫骨长度等参数进行了优化,显著提升了跳跃性能。优化结果显示,最佳起跳角度约为59°,而踝关节刚度需与髋部弹簧刚度线性匹配。通过实验验证,研究团队发现,优化后的跳跃机制能够实现1.4米的跳跃距离,并在空中保持高度稳定性。
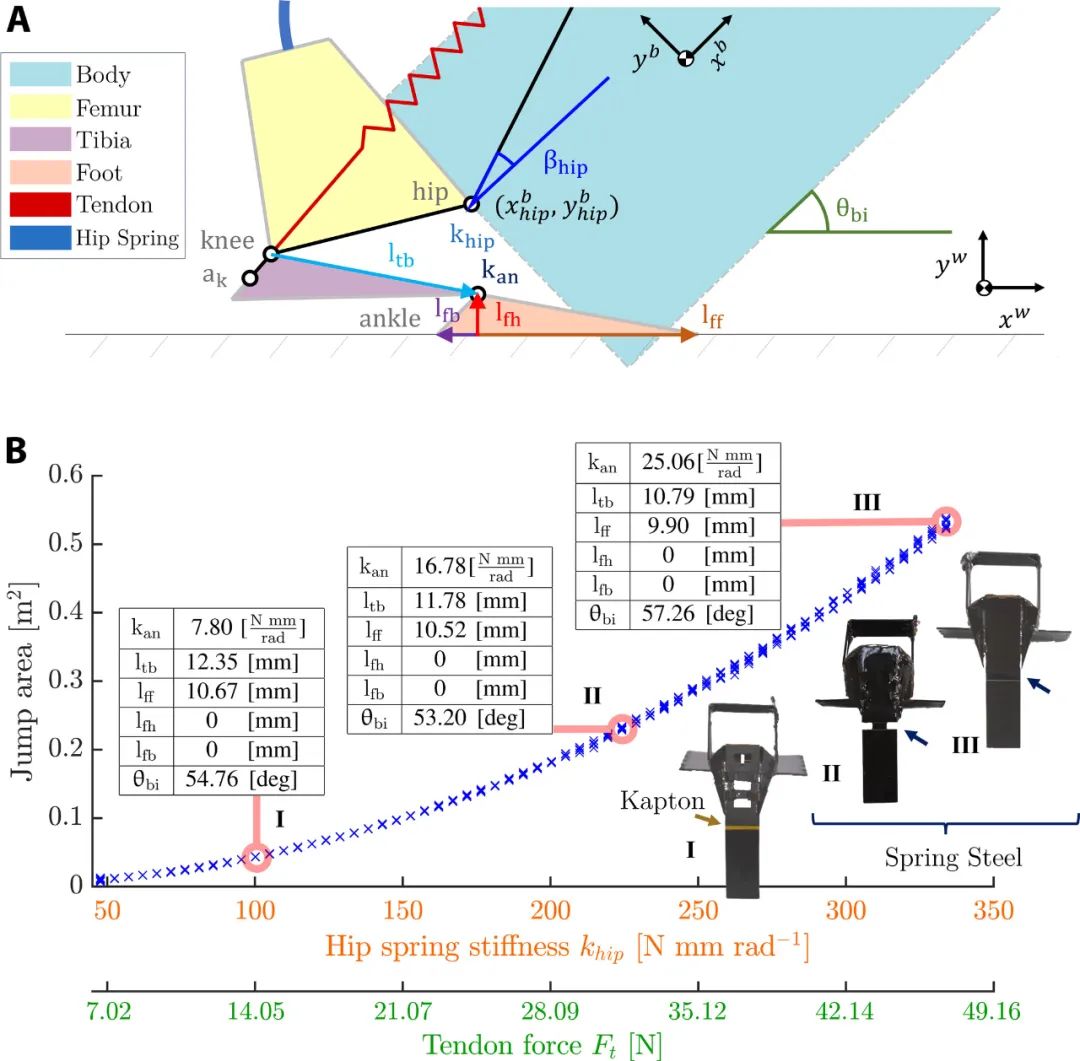
优化驱动的设计演变
同时,研究团队也进一步构建了两个原型机器人,将跳跃机制集成到微型机器人中以验证和优化性能。一个原型配备运动捕捉标记,用于精确追踪跳跃轨迹;另一个采用双平行SMA设计,以增强拉力强度并提高弹簧刚度。由于运动捕捉系统限制,运动捕捉原型使用了较薄的屈曲弹簧(7毫米厚)。实验显示,两种原型的跳跃轨迹与模拟结果高度吻合:运动捕捉原型的髋部弹簧刚度与模拟一致,双SMA原型也验证了优化设计的有效性。然而,实验中的跳跃角度(52°和56°)略低于模拟目标(59°),其主要原因在于实验需先完成能量加载,导致身体角度变化影响起飞角度。
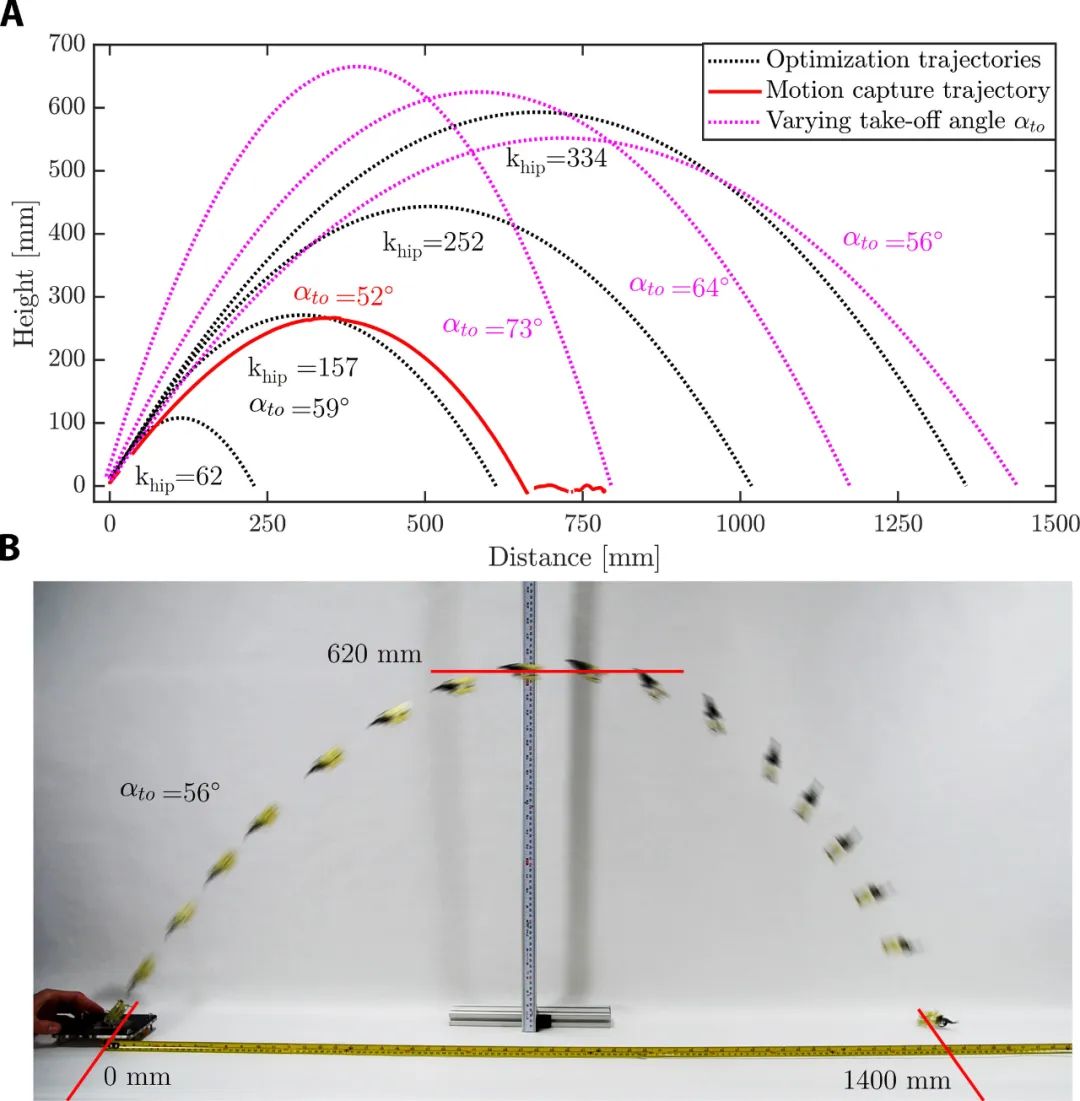
跳跃轨迹
研究团队指出原型构建面临挑战,如踝关节变形或SMA过热可能导致设备失效。因此,团队优先依赖模型进行性能预测和设计优化,仅对潜力方案进行原型验证。通过调整机器人初始身体角度,团队优化了起飞角度,实验中也通过后腿倾斜实现类似效果。这些结果为跳跃轨迹控制和着陆优化提供了重要参考。尽管模拟可生成稳定的无旋转跳跃设计,但最大化跳跃距离时仍会引入空中旋转。这与跳虫生物模型结论一致,即减少旋转会牺牲效率。
▍HAMR的进化:跳跃机制集成与多模态运动实现
为了验证跳跃机制在实际应用中的可行性,研究团队还将跳跃机制集成到了和佛大学研究人员此前研发的四足微型机器人HAMR上,并进行了相关实验。

四足微型机器人HAMR
HAMR平台在集成LaMSA跳跃模块后,凭借压电执行器和球形五连杆传动装置的精密配合,实现了每条腿上的升力和摆动自由度的灵活控制。这不仅让机器人能够以8.5 BL/s的速度高速行走,还掌握了包括跳跃在内的多种步态。同时,HAMR的承载能力也得到了显著提升,能够承载高达其体重两倍的重量,并且具备抵抗高空跌落的能力。
为了实验的顺利进行,机器人采用了系绳供电和控制的方式,但同时也存在自主版本的机器人。跳跃装置被巧妙地安装在机器人的背部,经过多次调整,研究团队成功实现了与机器人的完美融合。
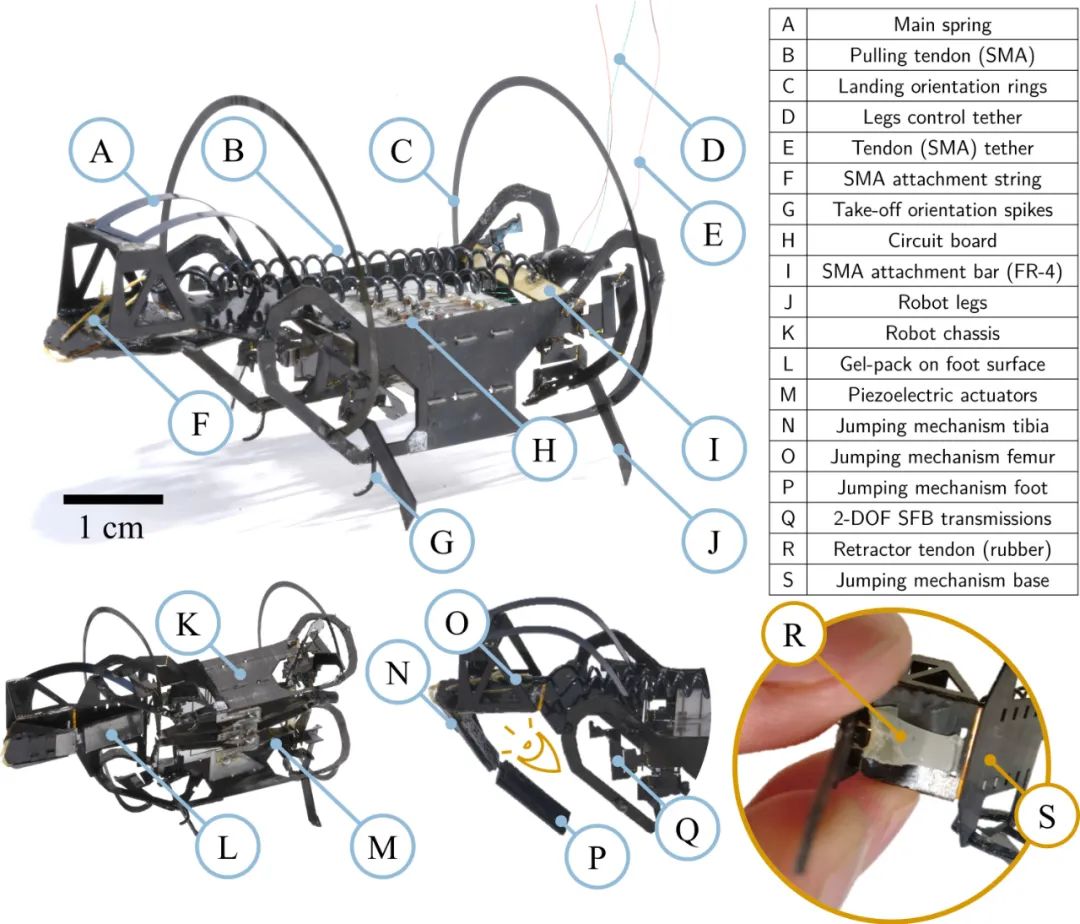
集成了LaMSA跳跃模块的HAMR
为了增强机器人在跳跃过程中的稳定性,研究团队还在机器人的胫骨和脚表面覆盖了X8 Gel-Pak材料,以增大摩擦力,防止打滑。此外,研究团队还为机器人配备了回缩肌腱、防滚架、SMA附件等精心设计的部件,以确保机器人在跳跃过程中的稳定性和安全性。回缩肌腱由硅橡胶制成,用于重置击球臂,实现重复跳跃;防滚架则帮助机器人在着陆后滚动/弹跳到正确方向,并保护敏感部件;SMA附件则通过FR-4矩形梁作为连接点,防止短路,并通过铜线连接到电源。
实验中,HAMR机器人展现了其出色的多模态运动能力。机器人不仅能够跳上高台、越过空隙、降落在斜坡上,还能够在不同地形上稳定着陆,并继续行走。这些演示充分展示了机器人着陆的稳定性和跳跃的精度。
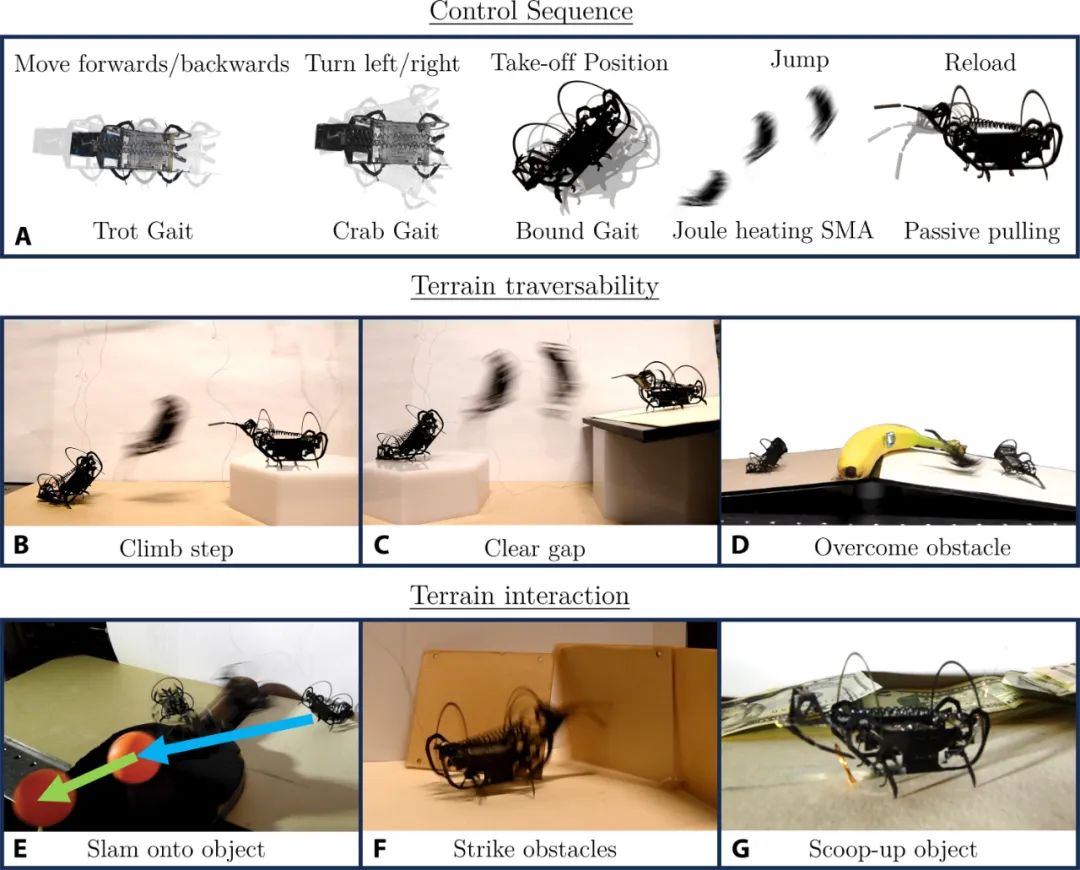 机器人多模式运动能力和各种地形交互
机器人多模式运动能力和各种地形交互
除了地形穿越能力外,HAMR机器人还使用跳跃附肢以独特的方式与周围环境互动。机器人能够跳到乒乓球上,引起动量转移,将球从球拍上推开;还能够在水平位置时用附肢撞击地面,导致薄墙障碍物倒塌;甚至能够用脚铲起金属丝环,并带着这个有效载荷走动。这些演示充分展示了机器人在增加跳跃机制后,对环境中物体施加的更大瞬时力。
在集成跳跃机制后,HAMR平台不仅提升了运动能力,还拓展了其应用场景。未来,这种具备多模态运动能力的微型机器人有望在更多领域发挥重要作用。
参考文章:
https://www.science.org/doi/10.1126/scirobotics.adp7854#F5
(文:机器人大讲堂)