



一个关于生存时间的困局。
作者|张麟
编辑|王博
3月29日晚上发生的小米SU7事故引发的舆论风暴还在持续。
警方的调查报告目前还未公布,但关于这场事故已经出现了太多的猜测和情绪的宣泄,这在一定程度上可能会模糊问题的焦点。
很多人把矛头指向了NOA(Navigate on Autopilot,导航辅助驾驶或智能辅助驾驶),并认为从NOA发出风险提示到车辆发生碰撞时间太短,没有给驾驶员留出足够的反应时间。
这是目前小米汽车发布的信息:
3月29日 22:44:24 NOA发出风险提示“请注意前方有障碍”,发出减速请求,并开始减速
3月29日 22:44:25 NOA被接管,进入人驾状态,方向盘往左转角22.0625度,制动踏板开度31%
3月29日 22:44:26 方向盘往右转角1.0625度,制动踏板开度38%
3月29日 22:44:26-28之间 车辆与水泥护栏发生碰撞
目前可以确定的是,这次事故中,车辆从发出预警到最终发生碰撞只有约3秒钟。
这里引入两个概念,TOR(Time-to-React Limit,接管请求时间)和TTC(Time-to-Collision,碰撞时间),前者指的是车辆从发出接管请求到自动驾功能退出,进入人驾状态的时间;后者则用于评估潜在碰撞风险的紧迫性。
从本质上讲,TTC代表了在当前速度和行驶轨迹保持不变的情况下,车辆与前方障碍物(可以是另一辆车、行人或固定物体)发生碰撞所需的估计时间。较高的TOR和TTC值通常能给驾驶员或自动系统提供更多的时间来采取规避措施。
那么,这次小米SU7事故中预警时间否过晚?目前行业内是否有标准?合理的TOR和TTC应该是多少?
1.反应时间是否足够?

根据目前的公开信息和现场事故还原,可以发现,这辆小米SU7在事故发生前开启了高速NOA功能,车辆处于辅助驾驶状态,速度为116km/h。
辅助驾驶过程中,系统对驾驶员进行过一次轻度分心报警和一次脱手预警,此后驾驶员及时进行相应操作,报警消失。
在正常行驶一段时间后,这辆小米SU7突然发出预警,提示“请注意前方有障碍”,发出减速请求。1秒钟后,驾驶员迅速接管车辆并采取相应控制措施,但并没能阻止事故发生,车辆最终撞向了水泥护栏,最终碰撞时速高达97km/h。
一个容易被忽略的细节:此次事故车辆在被驾驶员接管后,进行了两次转向,第一次转向角度为22度,第二次转向角度仅为1度,大概率是为了修正行车路线做出的操作。
这个过程中,行车轨迹一定程度上被延长了,如果驾驶员不进行转向操作,车辆到撞击到正前方障碍物的时间会更短。也就是说,这辆小米SU7在发出碰撞预警时,TTC时间预计只有约2秒钟。
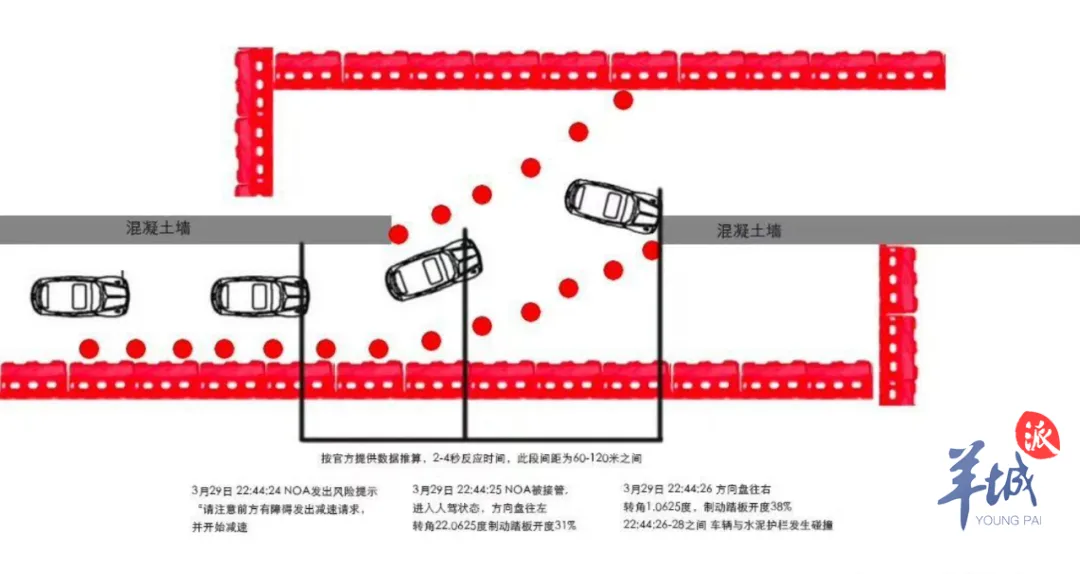
事故现场示意图,图片来源:羊城晚报
2秒钟的生存空间足够一个人完成紧急操作并安全通过障碍物吗?显然是不行的。
中国安全科学报于2023年发布的《基于生存分析的自动驾驶接管时间分析》一文中,对于不同性别、不同驾驶任务和不同紧急事件的情况下,驾驶员的接管时间进行了分析。其中女性驾驶员接收到接管指令后的平均接管时间为1.62秒。
全部驾驶员样本在“紧急接管请求(接管请求时间4秒)”的变量影响下,平均接管时间为1.51秒。而紧急接管请求一般会对应声音、震动和屏幕显示的多模态提醒,驾驶员在不失能的情况下均会及时做出反应。
美国国家公路安全管理局和德国全德汽车俱乐部发布的报告称,72%的自动驾驶事故发生在系统提示后2秒内,而驾驶员平均需要2.3秒才能完成有效接管。在高速公路场景,这个数值会延长至2.6秒。
但此次事故中,从预警发出到最终发生撞击,整个过程仅约3秒,驾驶员不可能完成能使车辆安全通过的操作。
那么合理的接管请求时间是多少?
同济大学论文《Assessing the Effects of Modalities of Takeover Request, Lead Time of Takeover Request, and Traffic Conditions on Takeover Performance in Conditionally Automated Driving》中指出,当接管请求时间为5秒时,驾驶员反应会更加迅速,但同时也更容易出现急刹车和急转向等行为,增加潜在风险。
当接管请求时间为7秒时,驾驶员能进行更充分的准备和操作,能够显著降低车辆的横向和纵向安全风险。
论文《Predicting driver’s takeover time based on individual characteristics, external environment, and situation awareness》,在进行接管时间预测模型分析的时候,也写明接管请求时间为5秒被认为是满足接管要求的安全阈值。
此外,当 TTC 过低(如小于2秒)时,即使系统发出接管请求,驾驶员可能也来不及接管并采取有效规避措施,因此自动驾驶系统可能需要触发自动紧急制动(AEB, Automatic Emergency Braking)。
显然,这辆小米SU7没有在发出预警后给驾驶员留有足够的操作时间。
2.业内标准缺失
在发生碰撞前3秒才发出接管请求符合法律规定吗?
很可惜,目前国内并没有明确的自动驾驶接管请求时间的法律规定,理论上来说,即使自动驾驶系统在碰撞前1秒向驾驶员发出接管请求,也并不违规。
首先,国家标准《智能网联汽车自动驾驶系统通用技术要求》(GB/T 44721-2024)中提到,从智驾系统介入请求发出到驾驶员成功接管,应保证10秒及以上的时间。然而,虽然是国家标准,但GB/T代码意为此标准为“国家推荐标准”,并不强制执行。
国家标准《智能网联汽车自动驾驶系统通用技术要求》首页
其次,目前国内尚未有车企明确将自己的自动驾驶系统划归为L3级别,无论在宣传上有多么智能,但法律意义上仍未L2级别自动驾驶,即“组合驾驶辅助”功能。
根据国标GB/T 40429-2021《汽车驾驶自动化分级》中的表述,L2级自动驾驶状态下,驾驶位用户的身份定义为“传统驾驶员”,与L0级别相同。
这种身份定义下,用户需要“监管驾驶自动化系统,并在需要时介入动态驾驶任务以确保车辆安全”,同时需要“在任何时候,可立即执行全部动态驾驶任务”。
因此,无论自动驾驶系统退出的有多晚,或者接管请求发出的多么极限,只要系统进行了这样的操作,以目前的行业标准和责任归属原则来看,其都是合规的。
另外,从目前的事故和多名驾驶者实际体验来看,也几乎没有车企能够做到为用户创造极大冗余的接管请求时间。
某新势力品牌车主乘风(化名)告诉「甲子光年」,他的车具有高阶智驾功能,在高速路段行驶过程中,往往车辆发现障碍物并发出接管请求时,他同样也已经观察到了障碍物,智驾功能并没有做到比人看的更远,这让其即使开启了智驾功能也必须专注驾驶。
国产某头部车企的智驾负责人对「甲子光年」透露:“现在的L2自动驾驶也分好多级别,包括了好多功能,(预警时间)确实没有细化的规定。”
对接管请求时间的讨论也并非刚刚开始,几年前就已经就已经有大量的专家学者开始了这方面的研究和讨论。
例如2020年8月22日,由中国电动汽车百人会主办的第三届全球智能汽车前沿峰会召开,清华大学姚丹亚教授就提出过接管请求时间的疑问,他认为L3级自动驾驶最大的难点在于“为接管预留多长时间有多久”。
“这个接管时间是10秒钟、1分钟还是3分钟?如果要求3秒钟接管,实际上驾驶员是不能分心去干别的事。现阶段车辆半分钟自动驾驶还能搞得定,时间太久就做不到了。我个人不站队,我认为接管时间问题解决了,L3就能做,如果一直解决不了,L3就没有办法做。”姚丹亚说。
现在看来,究竟该何时发出接管请求还将继续讨论下去。
3.技术困局
从技术角度能否实现提前预警和充裕的接管请求时间呢?
目前看来实现难度同样非常大。
提前发出接管请求有两个技术问题,一个是系统的识别能力,另一个是系统的判断逻辑。就识别能力而言,目前主流的自动驾驶感知技术都称不上强悍和安全。
例如在高速公路状态下,车辆以120km/h的速度巡航,如果智驾系统创造出5秒钟接管请求时间,就意味着车辆必须检测到其前方166米的障碍物并迅速做出判断,发出预警。
这个距离已经相当远了。对于纯视觉自动驾驶感知路线来说,BEV(Bird’s Eye View)+Transformer+OCC(Occupancy Network )占用网络已经是业内常用的感知方案。
这种感知方案的探测距离在100-200米,例如2024年,广汽发布了无图纯视觉智驾系统,其感知范围为:车前150米、车后100米、左右50米。
结合车企的宣传水分、行车路况、可视条件和天气等因素,纯视觉方案的探测距离可能会降至100米左右甚至更低,几乎无法完成车辆高速行驶状态下,在碰撞前5秒发出接管请求。
激光雷达由于工作原理不同,在检测距离方面要优于纯视觉方案,但166米的理论距离也已经达到甚至超过某些激光雷达探测距离的极限。
「甲子光年」在文章《禾赛盈利了,但激光雷达没有胜利》中写到,速腾聚创2024年4月发布的新一代激光雷达MX,没有注明官方的标准探测距离,只标注了最远探测距离为200米。行业预测速腾聚创MX的标准探测距离为150米左右。
禾赛科技发布的基于第四代芯片架构的超广角远距激光雷达ATX,其标准探测距离也仅为200米。
因此以目前自动驾驶系统的感知方案,无论是激光雷达还是纯视觉方案,都无法保证车辆在高速行驶状态下,为驾驶员提供5秒或更长的接管时间。
接管请求时间还涉及到自动驾驶系统对障碍物的识别判定和后续的避障功能联动。
此次小米事故车辆SU7标准版,搭载的只是入门级的智驾方案。软件算法由小米汽车自研,具备高领航辅助驾驶等能力。
但从此次事故后小米方面的官方声明可以看到,小米SU7标准版的碰撞预警 (FCW) 和紧急制动 (AEB) 功能,作用对象是车辆、行人、二轮车三类目标,其中AEB功能目前不响应锥桶、水马、石头、动物等障碍物。
也就是说,即使摄像头识别出了锥桶并发出了预警,但由于紧急制动功能并不会对前方锥桶进行响应。
根据小米方面公布的行车数据,22:44:24时,NOA发出风险提示“请注意前方有障碍”,并开始减速,结合其对AEB功能的解释,可以推测此时的“减速”并非紧急制动,减速效果有限。
AEB功能对锥桶、水马等道路施工设施的相应程度低的情况,也并非出现在小米一家车企中。
汽车自媒体AutoLab在今年年初进行了多辆新能源车型的主动安全测试,在“施工设施防碰撞”测试环节中,特斯拉在面对锥桶和水马时毫无反应;小鹏能够做出提示,但没有纠偏动作;蔚来同样没有进行紧急制动的应对措施。
这种识别功能和制动功能的割裂,同样也在一定程度上缩短了接管请求时间。
接管请求遇到的另一个问题是自动驾驶系统对行车状态的判断逻辑。如果车辆在不需要紧急刹车的时候频繁刹车,则会严重影响用户的驾乘体验。
在各个车企都大力宣传“XX公里无接管”的语境下,这种频繁地、毫无征兆地“幽灵刹车”是不能够被容忍的,很容易被扣上“智驾不好用”的帽子,甚至影响资本市场表现。
例如根据《证券时报》的报道,2022年2月17日,美国国家公路交通安全管理局(NHTSA)宣布,将对41.6万辆特斯拉汽车展开正式调查,原因是该机构已收到了354起关于特斯拉汽车“幽灵刹车”的投诉。这使得当日美股收盘时,特斯拉股价下跌5.09%。
就行车安全而言,如果AEB功能在不该刹车的时候介入并进行紧急制动,也有可能造成车辆姿态失稳、侧翻等情况,同样影响行车安全。
以目前的技术发展程度而言,紧急制动的介入情况、传感器的探测距离、接管请求时间等极大影响行车安全的重要指标,均没有达到车企宣传时传递出的自动驾驶技术水平。
前不久,新能源汽车行业开启了“全民智驾时代”,“有路就能开”“全国都能开”“到哪都好开”等宣传语句将自动驾驶捧上神坛,但关键指标的性能优劣和规则缺失,又似乎让自动驾驶的神话破灭了。
小米SU7事故发生后,近期不少车企与智驾相关活动都临时取消了,不管是智能驾驶还是自动驾驶,似乎又变成了大家“不愿提及”的词,这就又走向了另一个极端。
一场事故发生后,更应该做的是追问真相、寻找问题,尽量减少这种悲剧的发生,而不是在官方调查还没出来前,把某一方置于审判台上进行审问。
至少在目前,智能驾驶系统还无法取代人类,这是车企、智驾厂商、用户等都需要清楚理解的一点。
拥抱新的技术,并不意味着一定要付出血的代价。
*参考资料:
《基于生存分析的自动驾驶接管时间分析》,作者:王长帅,徐铖铖,邵永成,佟昊 ,彭畅
《Assessing the Effects of Modalities of Takeover Request, Lead Time of Takeover Request, and Traffic Conditions on Takeover Performance in Conditionally Automated Driving》,作者:Weida Yang, Zhizhou Wu, Jinjun Tang,Yunyi Liang
《Predicting driver’s takeover time based on individual characteristics, external environment, and situation awareness》,作者:Haolin Chen, Xiaohua Zhao, Haijian Li, Jianguo Gong, Qiang Fu
(封面图来源:AI工具生成)
(文:甲子光年)