
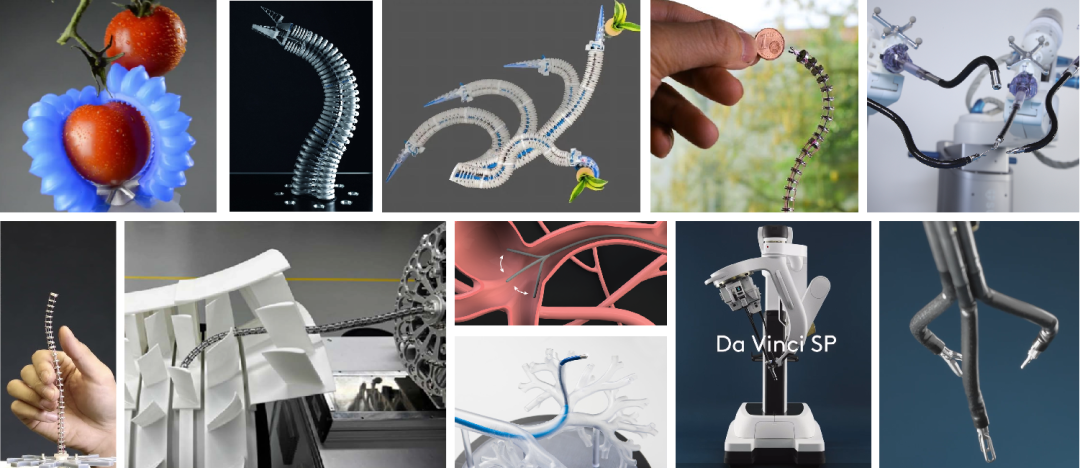
近年来,连续体机器人凭借其高柔顺性、灵活运动能力及轻量化和小型化结构,在医疗、工业检测、人机交互等领域展现出巨大应用潜力。然而,如何实现精准的路径跟踪仍是各类应用普遍面临的关键技术难题。
目前,主流的路径跟踪方法依赖于逆运动学求解,即通过数学模型求解末端执行器期望运动路径下驱动器的对应运动路径,并寻找多解以避开环境障碍物碰撞。然而,和刚性机械臂不同的是,连续体机器人多采用分段等曲率模型,该模型缺乏逆运动学求解理论,传统数值方法依赖初值,也难以找到多解。部分研究采用模型预测控制(MPC),通过在线优化调整控制策略,但该方法无法保证全局最优性。
受刚性机械臂研究的启发,有学者提出在执行器空间规划全局最优轨迹,作为前馈控制信号以提高跟踪精度。然而,连续体机器人的高度非线性特性使得其任务空间、配置空间和执行器空间之间的映射关系更为复杂。数值逆运动学算法通常只能提供单一解,且对初始值敏感,难以满足全局轨迹优化的需求。
因此,如何突破逆运动学求解的局限性,发展高效、多解、不依赖初始值的解算和规划方法,是提升连续体机器人路径跟踪性能的关键。
▍提出最优路径跟踪框架,实现运动控制突破性优化
面对上述挑战,浙江大学工业控制技术国家重点实验室熊蓉教授团队聚焦“连续体机器人能否在执行器空间构建最优全局轨迹” 这一问题展开系统研究,并提出了一套完整的驱动器空间最优路径跟踪框架。
研究团队首先基于四元数理论,建立了分段常曲率运动学的紧凑参数化模型,为后续研究奠定了简化的理论基础。在此基础上,研究团队通过严谨的数学推导,创新性地提出了降维解析条件,成功将复杂的三段式逆运动学问题转化为等效一维问题。通过引入近似处理实现维度遍历,并结合解析计算方法,构建出高效的逆运动学求解器。该求解器不仅显著提升了计算效率,还能准确获取配置空间中的多个可行解,为后续研究提供了关键技术支持。
进一步地,研究团队创新性地建立了连系配置空间与执行器空间的线性驱动模型。基于该模型,研究团队在执行器空间中实现了距离最优规划这一关键技术突破,并通过结合执行器动力学约束进行时间最优分配,成功生成了连续轨迹。基于上述系列创新成果,研究团队最终构建了融合离线最优轨迹规划和在线前馈-反馈控制的路径跟踪框架。
为充分验证所提方法的有效性,研究团队专门搭建了三段式肌腱驱动连续体机器人样机。实验结果表明:所提出的逆运动学求解器在求解效率(提升3.2倍)、成功率(提高28%)和多解获取能力等方面均表现出显著优势;执行器空间规划展现出突出的最优特性;路径跟踪精度相比反馈控制提升达42%,并在复杂障碍环境应用中充分证明了其实用价值。
该研究不仅在连续体机器人运动控制方面提供了创新性优化方案,更通过算法层面的重大突破,显著拓展了该类机器人的应用边界。前不久,相关研究的论文成果已以“An actuator space optimal kinematic path tracking framework for tendon-driven continuum robots: Theory, algorithm and validation” 为题发表在机器人领域顶级期刊《The International Journal of Robotics Research (IJRR)》上。
▍四元数理论助力,描绘机器人运动轨迹
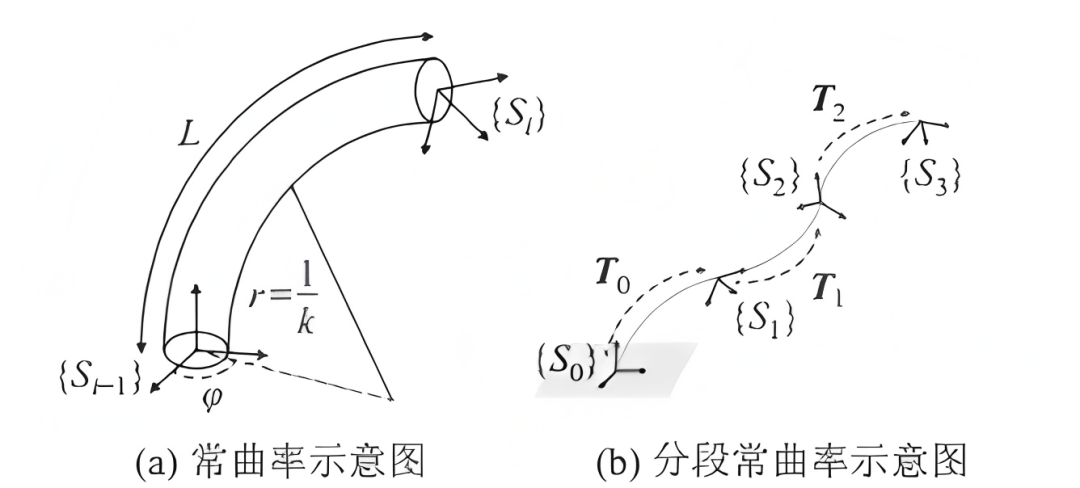
分段等曲率模型是目前被广泛使用的连续体机器人运动学模型。但由于方程的非线性,逆运动学解析表达式难以获得,且传统的数值迭代方法容易发散或陷入局部极值。
为了简化求解过程,获取解析表达式,研究团队引入了四元数这一数学工具。四元数是一种特殊的数,它由一个实数部分和三个虚数部分组成,可以简单理解为一种扩展的复数,它能够方便地表示三维空间中的旋转。想象一下,机器人在空间中做各种复杂的动作,其实就相当于一系列的旋转和平移组合。而四元数就像是一把精准的“尺子”,能够准确地衡量这些旋转的角度和方向。
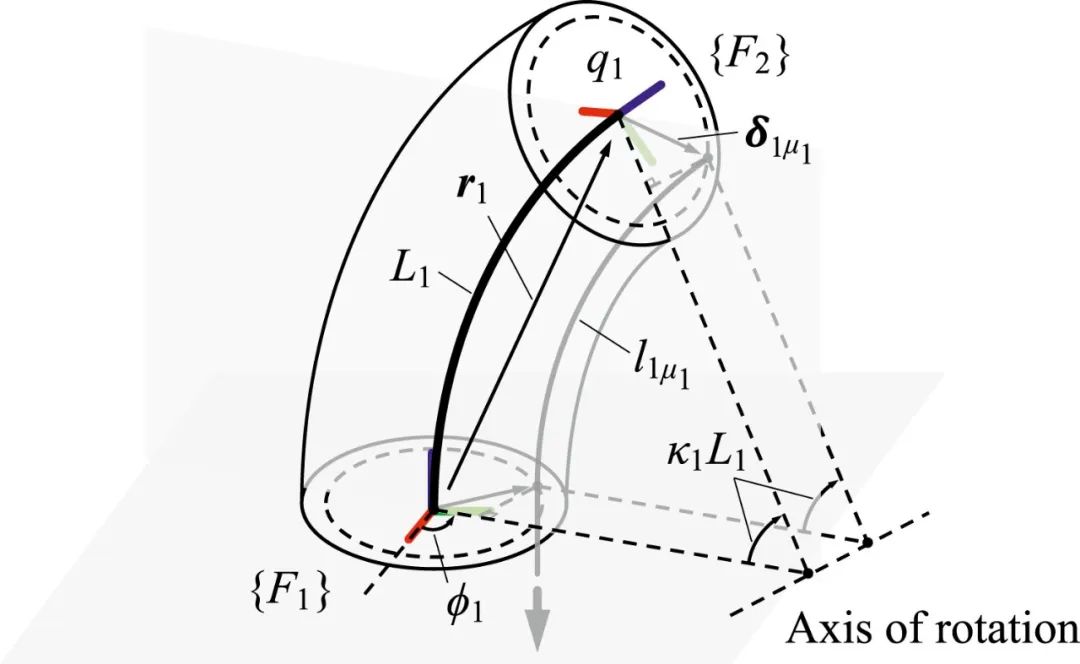
研究团队首先从机器人单段情况入手,利用四元数对机器人的末端位置和方向进行了更加简洁的描述。他们发现,机器人单段的末端位置和方向信息,其实只和四元数的三个元素之中(因为第四个元素在这种情况下恒为零)。这一发现大大简化了对机器人单段形变的分析。
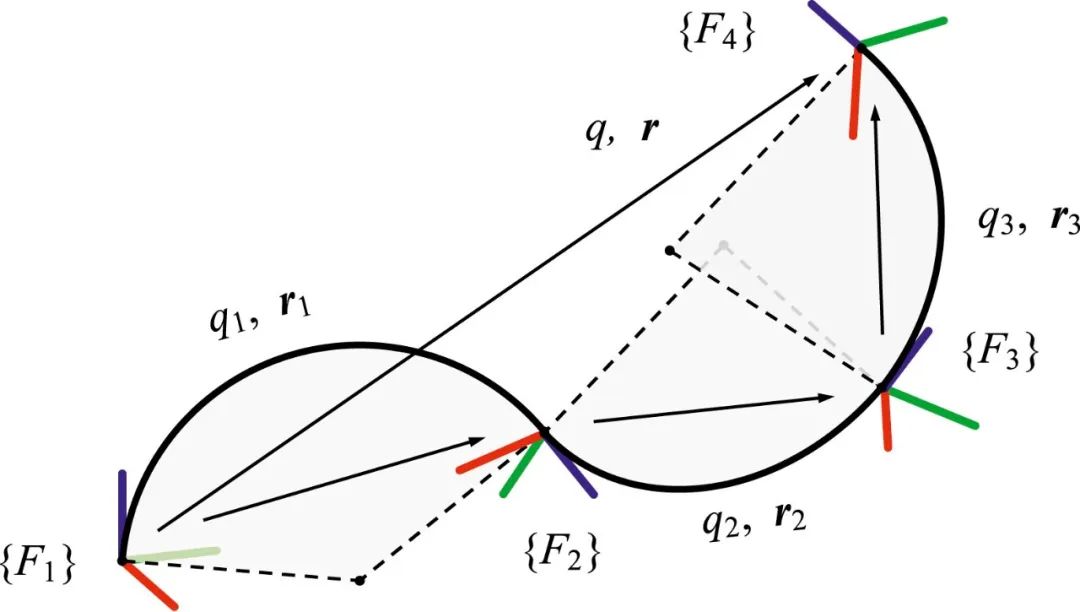
随后,研究团队将这一方法推广到多段机器人。对于由多段组成的机器人,每一段都可以看作是一个独立的运动单元,有自己的位置和方向。通过为每一段分配一个四元数,研究团队能够准确地计算出整个机器人的末端位置和方向,就像是用多个小箭头组合成一个大箭头,精确地指向目标位置。
▍逆运动学求解器:从目标反推执行器动作
现在,研究团队已然明确机器人末端期望抵达的位置与方向,那么该如何精准推算出机器人每一段应如何动作才能达成这一目标?这便是逆运动学问题。
对于机器人每一段而言,它拥有两个可调节的“自由度”,恰似两个能够灵活转动的旋钮。然而,当机器人仅有两段时,便会浮现出一个棘手问题:即便固定了末端的位置或者方向,机器人依旧存在一个“多余”的可调节旋钮,这便是所谓的冗余自由度。而当机器人扩展至三段时,其自由度总数达到六个,恰好与三维空间中位置和方向所需的自由度完美匹配。正因如此,三段机器人能够精准地抵达研究团队所期望的末端位置与方向,不存在自由度冗余。
逆运动学问题牵扯到众多非线性方程,为了解决这一问题,研究团队决心从简化问题入手,先从两段机器人展开研究。经过一系列严谨的数学推导,他们发现,当末端方向固定时,第一段机器人的四元数必须满足一个线性方程;而当末端位置固定时,第一段机器人的四元数又需满足另一个方程。如此一来,原本复杂的逆运动学问题便被巧妙地简化为寻找满足这两个方程的四元数。
对于三段机器人,研究团队同样运用类似的方法,成功推导出每段机器人的四元数必须满足的方程。但相较于两段机器人,此次的方程复杂程度大幅增加。为了更直观地理解三段机器人的逆运动学问题,研究团队借助图示进行分析。但由于需要寻找的是满足所有约束条件的四元数解,这一过程极具难度,因此研究团队为了更高效找到解,开发了逆运动学求解器。

逆运动学求解器构建流程图
在求解器的设计过程中,研究团队首先通过理论推导对原问题进行降维处理,同时严谨地证明了降维前后问题的等价性,确保简化后的问题依然能够准确反映原问题的本质。接着,针对低维问题,研究团队采用近似估计方法进行简化,并证明所使用的近似方法只会引入有界的误差,为后续的求解提供了坚实的理论基础。最后,研究团队对低维近似问题的解空间进行全局搜索遍历,并通过少量迭代对结果进行修正,从而消除误差,最终得到原问题的多个解。
该逆运动学求解器不仅能够高效求解逆运动学问题,还能同时获取多个解,具备分辨率完备的优势。仿真实验结果表明,针对工作空间中随机给定的末端位置与姿态,研究团队所提出的算法在求解效率方面较传统数值方法有了显著提升,平均求解时间大幅缩短约80%。同时,该算法的求解成功率更高,具备强大的多解获取能力,能够很好地适应存在障碍物的复杂环境。
▍轨迹规划器:精准规划机器人行动路径
在通过逆运动学求解算法对给定路径求解后,能得到机器人完成路径的所有可能配置方式,也就是将工作空间目标点映射至状态空间中的多个点。然而,要在驱动器层面开展有效规划,状态空间到驱动器空间的映射问题亟待解决。

轨迹规划器构建流程图
研究团队经过深入的理论推导,成功构建了轨迹规划器,实现了机器人状态与驱动量之间双向线性映射关系的建立。在获取路径采样点处的逆运动学多解后,借助该模型,可准确计算出驱动器空间中的对应值。随后,团队以每个解作为节点,计算相邻节点间的驱动距离,构建出加权图,并运用动态规划方法在其中搜索具有最短执行距离的路径,该路径即为执行器移动距离最短的机器人配置序列。
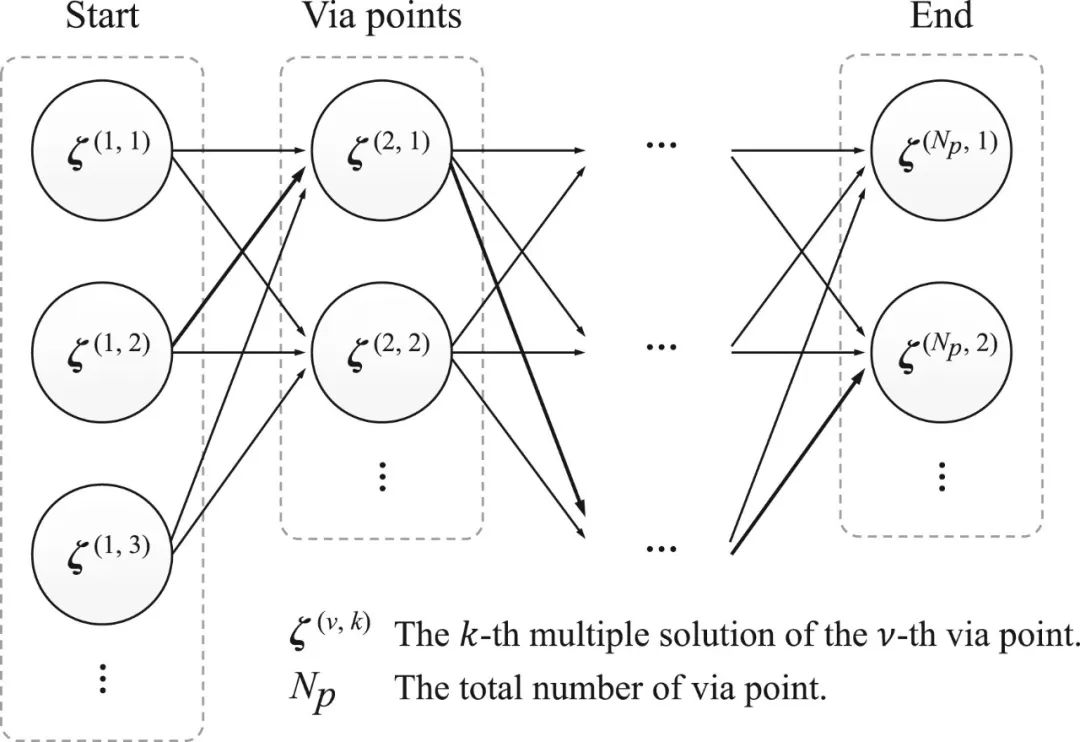
确定最优路径后,为机器人经过每个路径点分配时间成为关键环节。这需要充分考虑驱动器硬件约束,例如速度和加速度不能超过最大值等。研究团队采用一系列抛物线混合的线性多项式对离散的机器人配置进行插值,依据执行器的速度和加速度限制合理分配时间。最终得到的轨迹呈现梯形特征,包含加速、匀速和减速三个阶段,在满足约束条件下,实现了时间最优。
▍跟踪控制框架:实现稳定准确路径跟踪控制
现有基于模型的连续体机器人路径跟踪控制框架大多基于微分运动学构建。为加快控制收敛速度、提升路径跟踪精度,亟需构建新的框架融合前述运动学解算和规划结果,以实现对连续体机器人的稳定、精准路径跟踪控制。
研究团队构建了一个包含离线最优轨迹规划和在线前馈与反馈控制的框架。
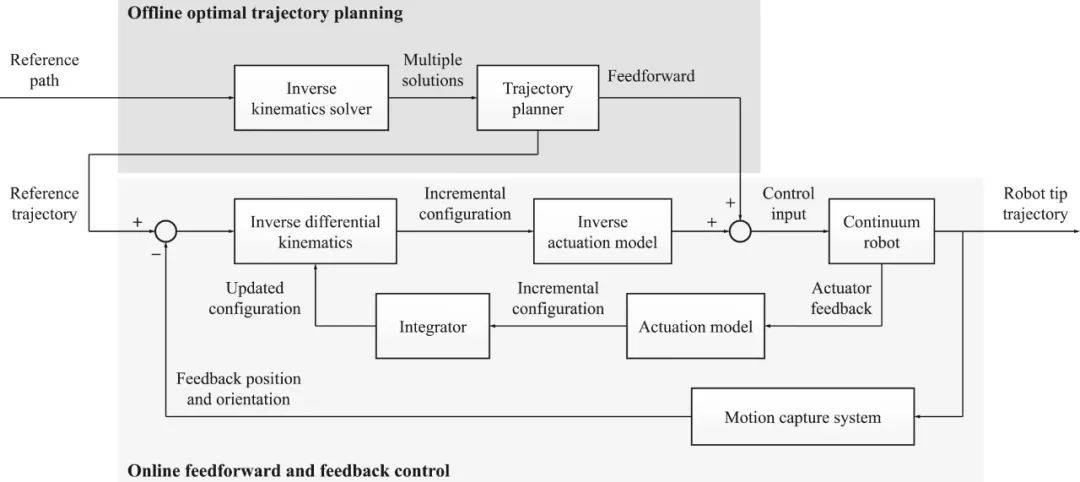
路径跟踪框架的架构
离线最优轨迹规划聚焦于预先为机器人规划出最优运动路径:首先,基于给定期望末端路径选取采样点并获取位置与方向信息;接着运用逆运动学求解算法找出各采样点所有可能的机器人配置,并进行碰撞检测以规避障碍物;随后借助驱动器空间规划算法挑选出执行器空间移动距离最短的配置序列;再依据硬件约束为采样点分配合理时间;最后通过插值处理得到连续轨迹,确定执行器空间运动轨迹与笛卡尔空间参考轨迹,为机器人后续运行提供精准的运动指引。
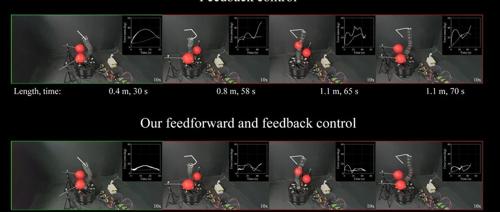
在线前馈与反馈控制着重于机器人运行过程中实时保障其精准跟踪规划轨迹:控制由前馈与反馈两部分构成,前馈控制依据规划轨迹预测机器人配置变化率并转换为执行器速度指令,使机器人提前预知动作;反馈控制则借助运动捕捉系统获取机器人实时位置与姿态信息,与期望值对比后计算反馈补偿量并转换为执行器速度指令,在机器人偏离轨迹时及时调整,确保其始终沿着正确轨道运行。
作为研究案例,研究团队为机器人末端指定了一条期望跟踪的路径。采用所提出的规划器,依次完成求解、碰撞检测、路径选取与时间分配等步骤,成功实现了驱动器空间的最优轨迹规划。同时,研究团队还对完整流程进行了可视化展示,直观地呈现了规划与控制的过程。
▍样机搭建:进行算法及框架有效性验证
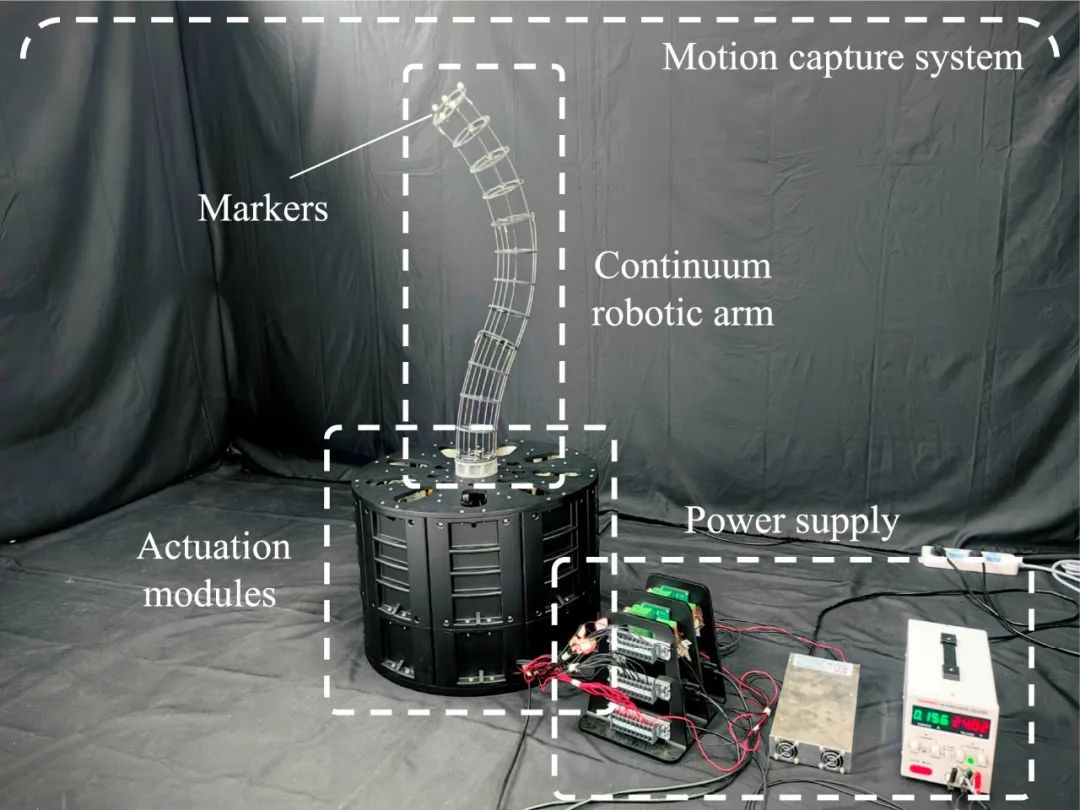
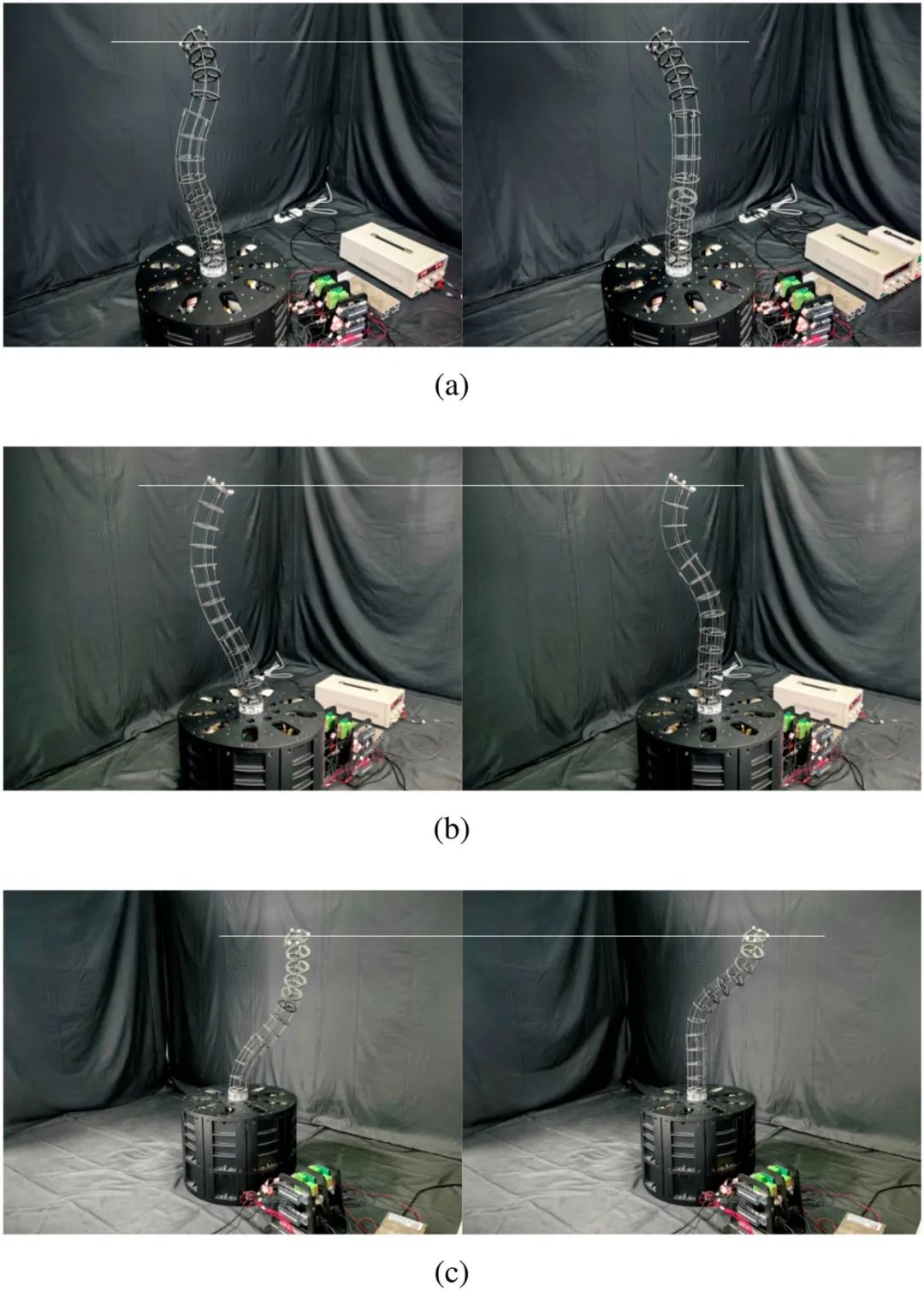
为验证所提算法及框架的有效性,研究团队搭建了三段式肌腱驱动连续体机器人样机,并开展了一系列针对性实验。
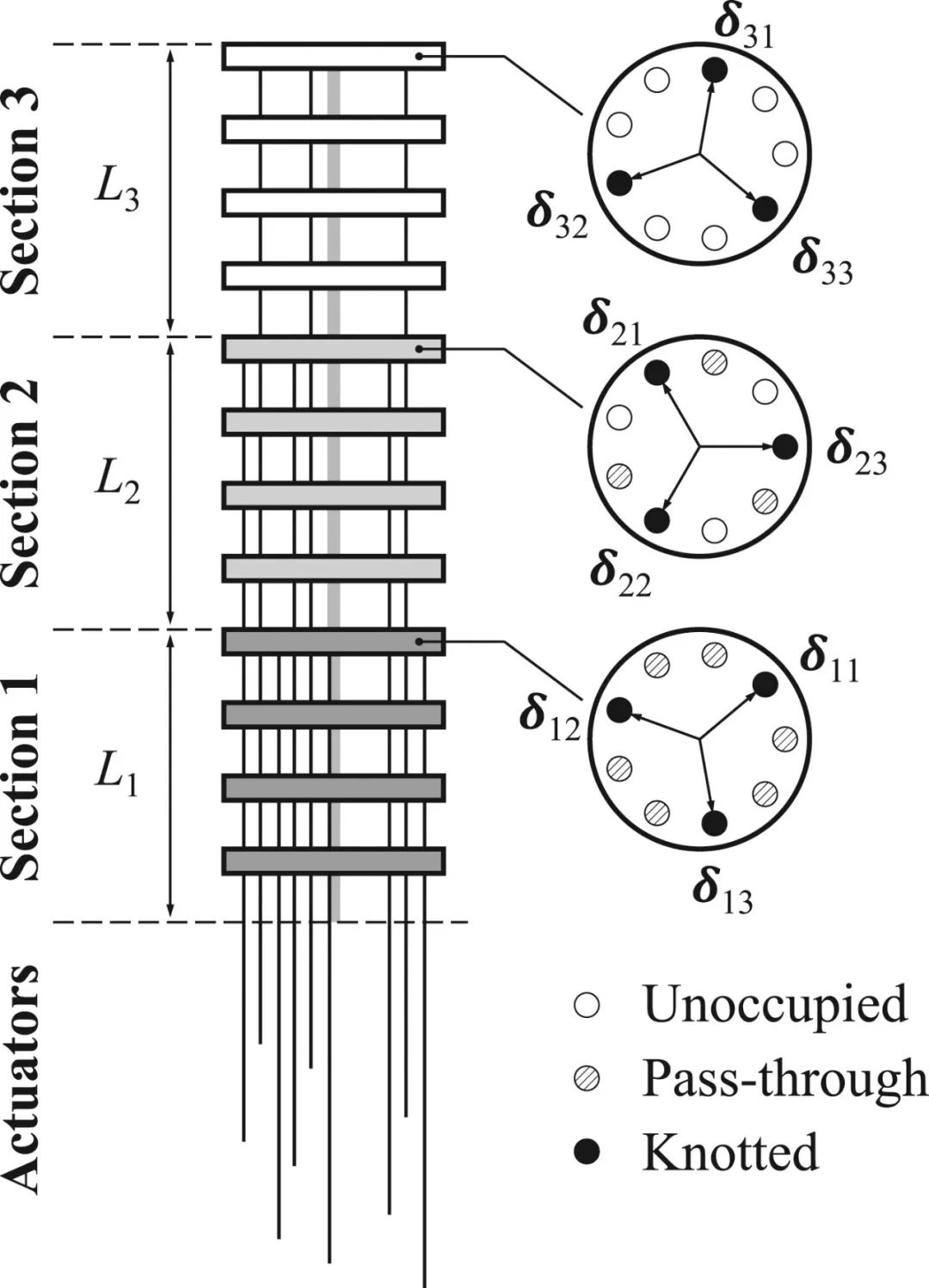
三段式肌腱驱动连续机器人示例配置图
该机器人原型由三段固定长度部分构成,每段内部以超弹性镍钛合金棒为骨架,外部等距分布碳纤维盘,增强结构刚性与稳定性。其驱动采用九根独立控制的不锈钢丝绳(肌腱),每三根肌腱控制一段,通过拉动或释放实现弯曲动作,确保动作精准灵活。测量系统方面,在机器人尖端安装反射标记,借助实时运动捕捉系统(如OptiTrack)跟踪位置和姿态信息,为控制算法提供反馈。
连续机械臂机械设计图
在验证实验中,研究团队从多个维度展开:
逆运动学求解器性能验证:该实验主要随机生成目标位姿,用不同算法求解逆运动学问题,记录成功率、平均迭代次数和运行时间,并在自由空间与含障碍物空间分别实验。结果显示,所提求解器在效率和成功率上优于基准算法,尤其在含障碍物空间能快速找到无碰撞解,且无需初始值,避免陷入局部极小值,提高了求解可靠性。
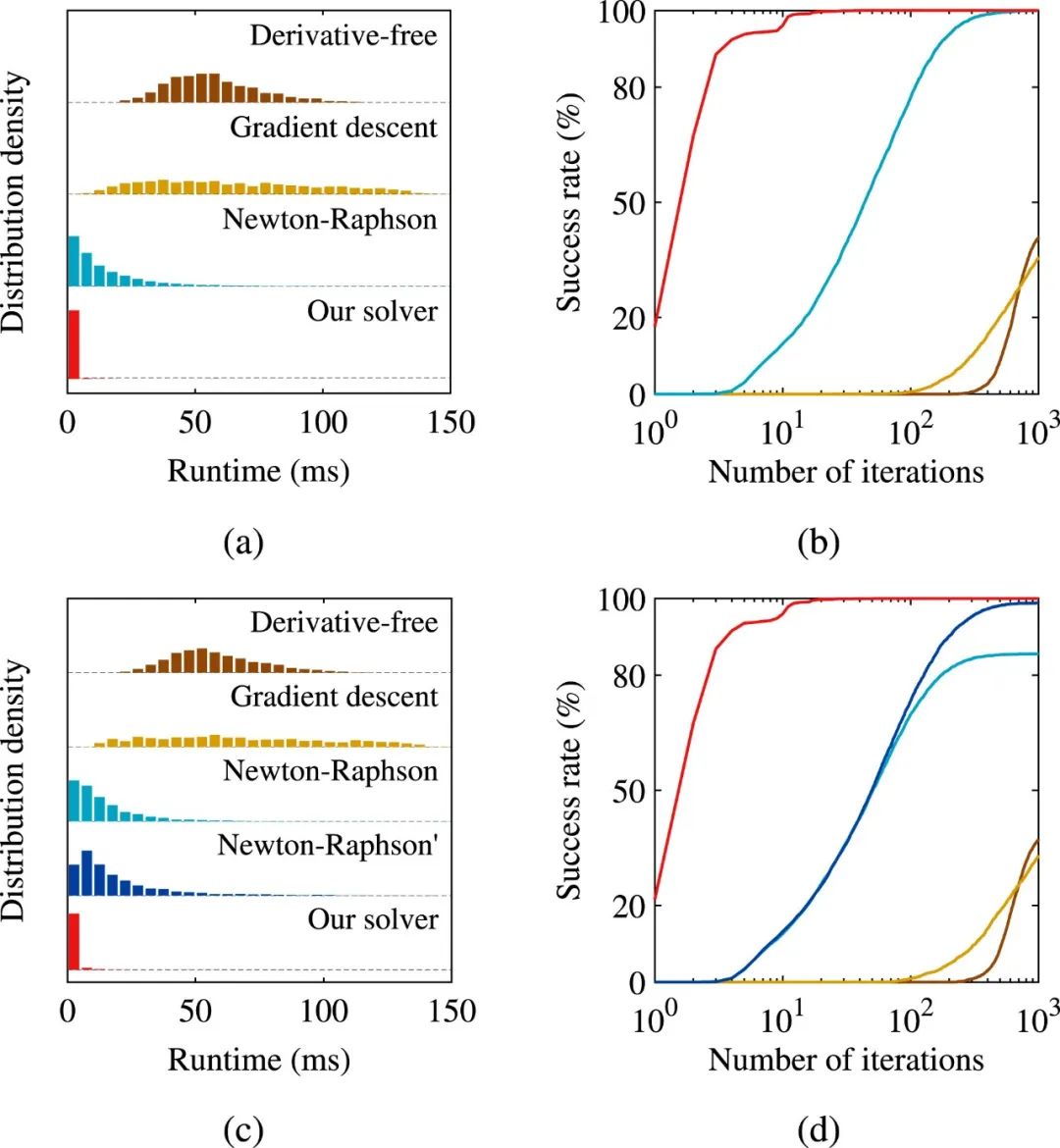
多种解决方案验证:该实验主要针对特定末端旋转和平移应用求解器,记录多个解并评估碰撞情况。结果表明,求解器能找到多个解,部分可能碰撞障碍物,但通过迭代校正可找到无碰撞解,验证了其多解求解能力。
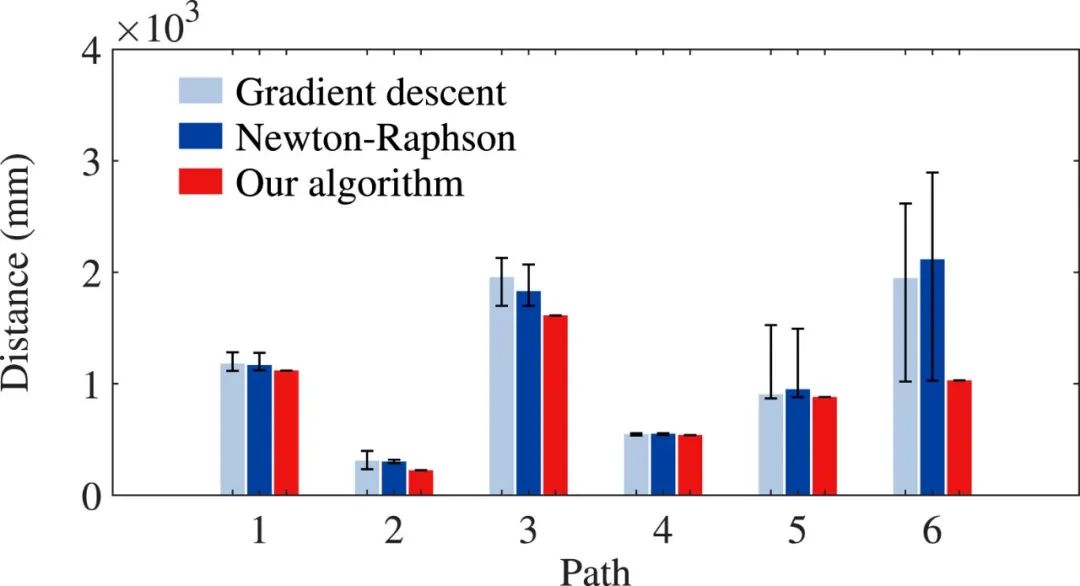
执行器空间最优性验证:该实验主要构建不同形状路径,用数值方法和所提算法进行运动规划,计算执行器总行程距离并应用时间分配算法,多次重复实验评估统计数据。结果显示,所提算法能给出执行器最短总行程距离,在求解效率和结果最优性上优于数值方法。
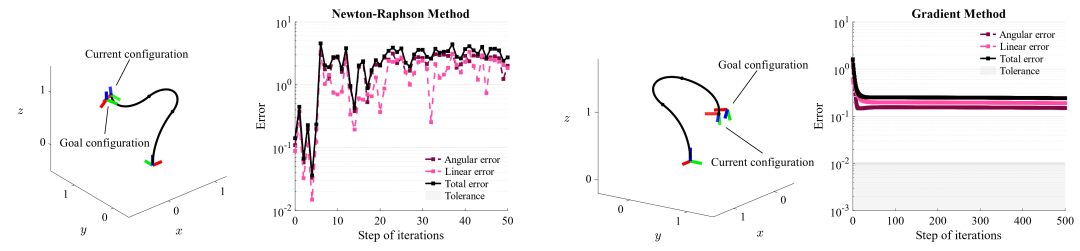
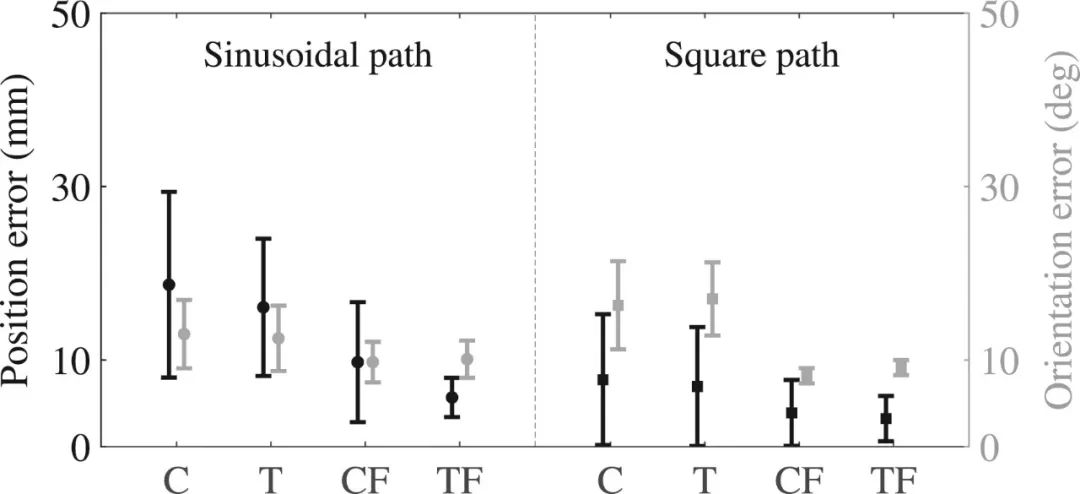
路径追踪实验:该实验主要通过构建含途经点的路径并指定尖端方向,应用框架进行轨迹规划和在线控制,研究团队设置了四组不同设置评估前馈和时间分配效果,记录误差并评估统计数据。实验表明,引入前馈控制可显著减少跟踪误差,最优时间分配算法能根据机器人构型与执行器约束变化分配合适时间,进一步降低误差,前馈与最优时间分配协同作用效果更佳。
案例研究
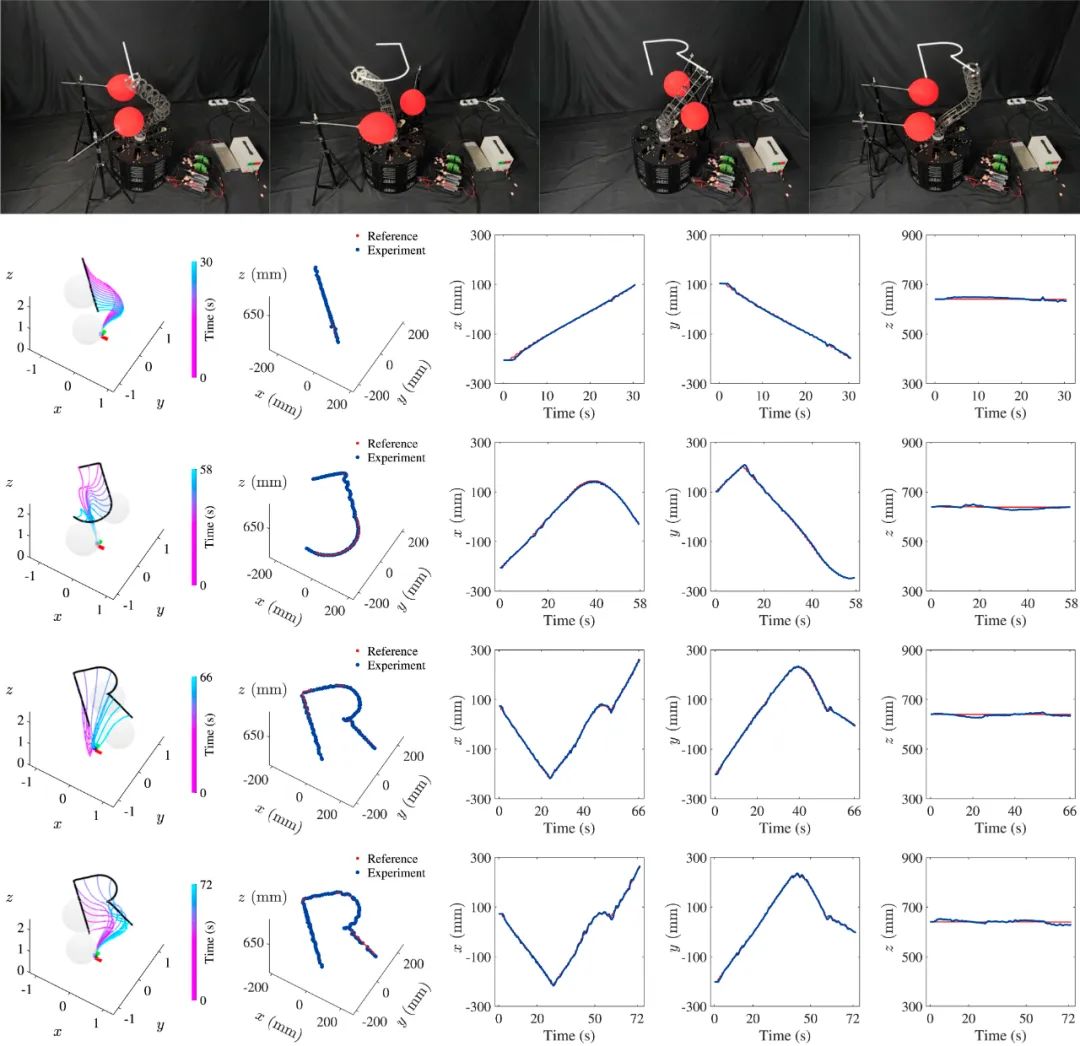
通过上述实验,研究团队证实了三段式肌腱驱动连续机器人原型及其控制算法的有效性。其机器人原型结构灵活、驱动精准、测量准确,能在复杂环境中实现高效精准的运动控制。控制算法在求解逆运动学问题、生成最优轨迹以及提高跟踪精度方面表现优异,跟踪精度较传统反馈控制器有明显提升,平均末端位置误差降低50%至80%,为连续机器人的应用提供了有力支撑。
参考文章:
https://journals.sagepub.com/doi/abs/10.1177/02783649241290525
(文:机器人大讲堂)