
在科技日新月异的今天,IEEE Xplore作为电气工程、电子计算机工程、计算机科学等领域的重要学术资源平台,持续引领着技术前沿。本文特别精选了IEEE Xplore 2024年度公开全文的文章中,标题包含ROBOT的最受欢迎的TOP 10文章进行内容概述,以飨读者。

1、Adaptive Robot Coordination: A Subproblem-Based Approach for Hybrid Multi-Robot Motion Planning
自适应机器人协调:基于子问题的混合多机器人运动规划方法
这篇文章提出了一种名为自适应机器人协调(ARC)的新型混合框架,用于解决多机器人运动规划(MRMP)中的复杂问题。ARC方法的核心在于通过创建以冲突为中心的子问题来动态地处理机器人间的冲突。这些子问题仅在需要时,且在特定的物理位置动态地耦合和解耦必要的机器人子集,从而实现了对多机器人规划空间的高效探索。这种方法不仅创新,而且经济,因为它允许机器人在可以独立操作的解耦空间和协调至关重要的耦合空间中进行规划,从而有效地调整协调级别。ARC是概率完备的,意味着它可以应用于任何类型的机器人,并在更短的规划时间内产生具有成本效益的解决方案。文章通过广泛的评估证明了ARC在解决不同场景中的协调问题上的有效性和竞争力。
发布日期:2024年6月28日
https://ieeexplore.ieee.org/document/10577245
2、An Interaction Behavior Decision-Making Model of Service Robots for the Disabled Based on Human–Robot Empathy
基于人机共情的残疾人服务机器人交互行为决策模型

在人机交互领域,特别是对于残疾人的服务机器人而言,如何赋予机器人以共情能力,从而更好地理解并执行用户的指令,成为了一个亟待解决的问题。本文提出了一种基于人机共情的决策模型(HREDM),该模型集成了感知、认知和决策三个层次。通过SE-ResNet神经网络,机器人能够精准识别用户的面部表情,理解其情绪状态。进一步地,基于Q-Learning的强化学习模型使机器人能够根据用户的交互偏好进行主动学习,做出恰当的反应。实验结果显示,该模型不仅提升了机器人的自主学习能力,还能在识别用户情绪的基础上,做出积极影响用户的决策。这一成果在志愿者满意度评估中获得了3.7分的高分,充分证明了其在提升人机交互体验方面的有效性。此外,该模型为服务机器人的个性化设计和智能化发展提供了新的思路。
发布日期:2024年1月25日
https://ieeexplore.ieee.org/document/10414100
3、DiGeTac Unit for Multimodal Communication in Human–Robot Interaction
用于人机交互中多模态通信的 DiGeTac 单元
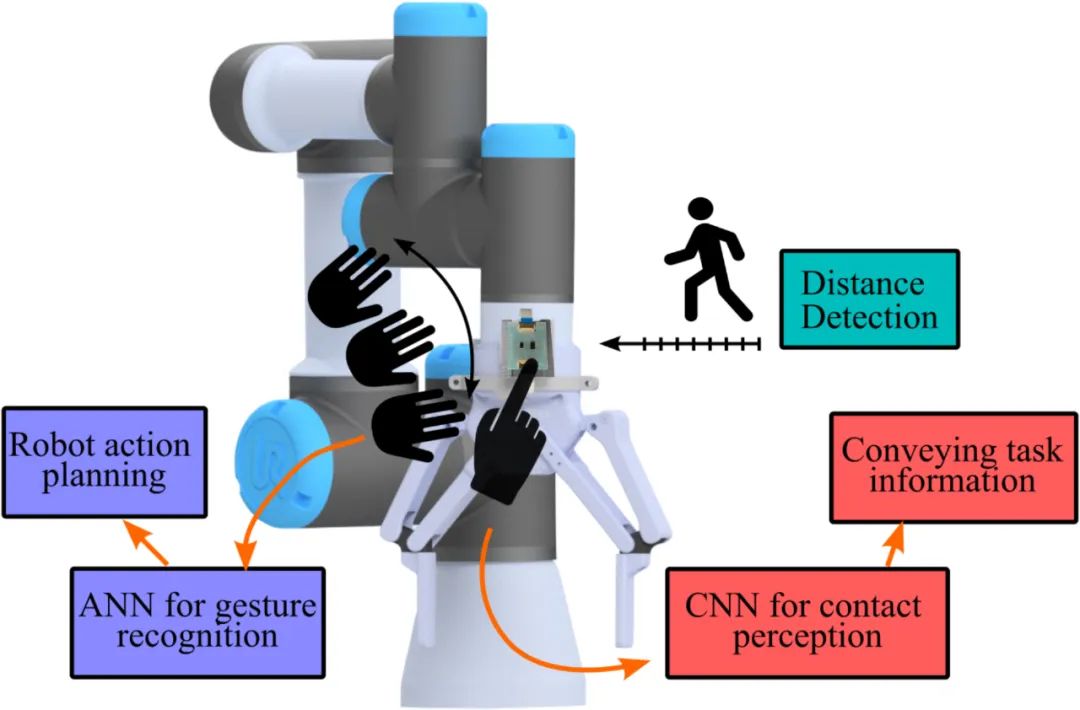
在人机协作(HRC)场景中,实现高效、安全的交互至关重要。本文介绍了一种名为DiGeTac的多模态传感单元,它集成了距离、手势和触觉三种感知元素,为HRC提供了强大的技术支持。DiGeTac的顶层设计用于检测距离和手势,而底层则配备了触觉传感器。通过人工神经网络和卷积神经网络的应用,该单元能够分别以96%和88%的准确率识别手势和接触位置。在与通用机器人手臂的实时协作任务中,DiGeTac展现了其卓越的传感能力,有效增强了HRC设置中的交互体验。这一创新不仅提升了人机交互的效率和安全性,还为未来智能机器人的发展奠定了坚实的基础。
发布日期:2024年4月22日
https://ieeexplore.ieee.org/document/10506616
4、HIPer: A Human-Inspired Scene Perception Model for Multifunctional Mobile Robots
HIPer:一种受人类启发的多功能移动机器人场景感知模型

在开放世界环境中像人类一样使用移动服务机器人接管任意任务需要整体场景感知来进行决策和高级控制。本文提出了一种受人类启发的场景感知模型,以最小化人类和机器人能力之间的差距。该方法采用了基本的神经科学概念,例如将三元组感知分为识别、知识表示和知识解释。识别系统将背景和前景分开,以集成可交换的基于图像的对象检测器以及同时定位和映射,多层知识库以分层结构表示场景信息并提供用于高级控制的接口,知识解释方法利用时空场景分析和感知学习进行自我调整。使用单设置消融研究来评估每个组件对两个模拟环境和一个真实环境中的获取和携带场景的整体性能的影响。
发布日期:2024年6月28日
https://ieeexplore.ieee.org/document/10577501
5、Perceived Intelligence in Human-Robot Interaction: A Review
综述:人机交互中的感知智能
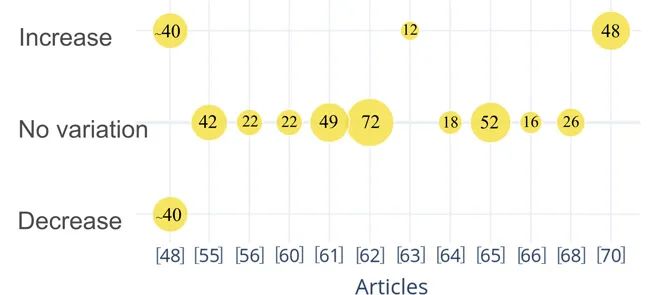
随着人工智能技术的飞速发展,人机交互中的感知智能成为了一个备受瞩目的研究领域。本文系统性地回顾了影响机器人智能感知的关键因素,并深入探讨了实验前后以及长期交互过程中,用户对机器人智力感知的变化。研究发现,尽管不同研究间存在结论差异,但总体上,当使用商业化或更新型的机器人平台时,用户的感知智力往往呈现上升趋势;而对于定制或新型机器人,则可能呈现下降趋势。此外,习惯效应在感知智力变化中扮演了重要角色,随着交互时间的延长,用户往往对机器人的智力评价有所提升。这一综述不仅总结了当前研究的最新进展,也为未来探索人机交互中的感知智能提供了新的视角和思路。
发布日期:2024年10月11日
https://ieeexplore.ieee.org/document/10714350
6、ASAP: Agile and Safe Pursuit for Local Planning of Autonomous Mobile Robots
ASAP:敏捷、安全追求自主移动机器人局部规划
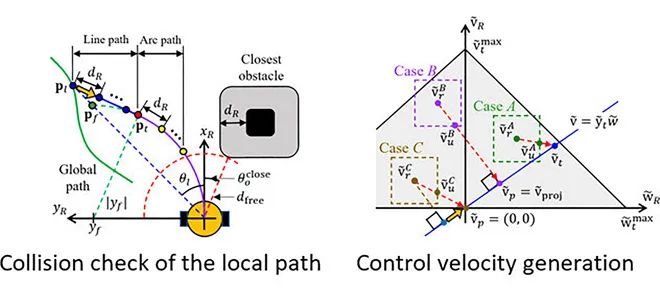
本文提出了一种用于自主移动机器人的新颖的本地规划方法,称为敏捷和安全追求(ASAP)。它的目标是在杂乱的环境中实现敏捷的路径跟踪和安全的碰撞避免,同时确保计算能力有限的嵌入式系统的实时性能的计算效率。对于敏捷路径跟踪,所提出的方法利用包括直线路径、弧线路径和原地旋转的局部路径,并根据机器人的运动学约束生成目标速度。为了安全避免碰撞,所提出的方法使用障碍物信息来生成安全角,安全角代表自由空间中的点以绕过任意形状的障碍物,并选择具有最短行程时间的最佳安全角。为了尽快达到目标速度,所提出的方法使用归一化速度空间来计算控制速度,从而在尽可能短的时间内实现目标速度的线性和角度分量之比。为了使最终用户能够轻松地使机器人的行为适应不同的环境,所提出的方法被设计为只需要几个调整参数。通过各种场景下的硬件在环仿真和杂乱环境下的真实机器人测试的实验结果证明了该算法的敏捷控制、严格的碰撞避免和计算效率。值得注意的是,所提出的方法的计算速度比其他现有算法快 25 至 200 倍。
发布日期:2024年7月17日
https://ieeexplore.ieee.org/document/10600674
7、Formation Control of Nonholonomic Multirobot Systems Over Robot Coordinate Frames and Its Application to LiDAR-Based Robots
机器人坐标系上非完整多机器人系统编队控制及其在激光雷达机器人中的应用
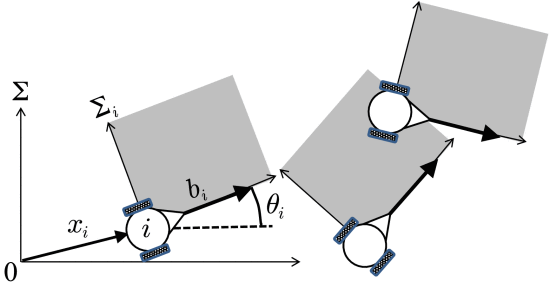
本研究针对机器人坐标系中的非完整多机器人系统编队控制提出创新方案。技术路线上,采用特殊欧几里得群上的李群理论建模非完整约束和测量,通过目标函数的梯度流投影开发控制方法。创新点在于使用基于派系的目标函数替代传统的基于边缘目标函数,使编队控制器具备分布式特性。该方法的普适性突出,可同时应用于AGV和UAV等不同场景,空间维度扩展性好。在技术实现层面,该方法重点解决了三个关键问题:首先是非完整约束下的控制空间定义,将其设计为切线空间的子空间;其次是机器人坐标系中的测量问题,通过特殊的数学模型进行描述;最后是分布式控制算法的设计,确保系统具有最优性能。实验验证采用3D空间模拟和配备LiDAR的实体机器人测试,结果表明该方法在实际应用中具有良好的可行性和稳定性。特别是在复杂环境下,系统表现出优异的适应性和鲁棒性,为多机器人协同控制提供了新的技术路径。
发布日期:2024年5月16日
https://ieeexplore.ieee.org/document/10531753
8、Importance of Mutual Communication Through a Simple User Interface in Care Robots
在护理机器人中通过简单的用户界面进行相互通信的重要性

针对人口老龄化背景下护理机器人应用受限的问题,该研究聚焦改善人机交互体验。研究发现传统单向信息展示模式容易引发用户焦虑,原因是机器人行为与用户意图可能存在时序和内容上的不匹配。为此,提出基于简单用户界面的双向交互方案,通过屏幕、扬声器进行信息输出,并设置简单按钮供用户输入意图。系统设计特别考虑了老年用户的使用特点,采用大字体显示、清晰的语音提示和简单的按钮操作,降低了使用门槛。在异常情况时,系统采用”展示-确认-执行”的三步交互模式:首先展示可选操作供用户确认,然后等待用户通过按钮输入选择,最后执行相应动作。实验通过多组对照测试,从用户体验、操作效率和安全性等多个维度进行评估。结果证明这种交互模式显著提升了用户舒适度和系统易用性,为提高护理机器人接受度提供了可行方案。研究结果对推动护理机器人在老年人日常生活中的应用具有重要指导意义,同时为解决人机交互中的信任问题提供了新思路。
发布日期:2024年7月2日
https://ieeexplore.ieee.org/document/10580950
9、Improved Q-Learning-Based Motion Control for Basketball Intelligent Robots Under Multi-Sensor Data Fusion
多传感器数据融合下改进的基于Q-Learning的篮球智能机器人运动控制

本研究针对智能篮球机器人运动控制精度和稳定性不足的问题,提出基于多传感器融合的改进Q学习控制方法。研究分三个层面系统展开:首先研究多传感器数据融合技术,通过整合激光测距、视觉感知和姿态传感等多源数据,提升环境感知精度;其次针对传统Q学习算法在动态环境下收敛慢、泛化能力差等问题,提出改进方案,显著增强了运动控制能力;最后构建了综合控制模型,实现了感知、决策和控制的闭环优化。实验平台配置高端,采用Intel Core i9-11900K处理器和NVIDIA GeForce RTX 3080显卡进行计算,使用MATLAB R2023a进行系统参数化和仿真,Webots R2023a软件用于模拟机器人动作。硬件设备选用Hokuyo URG-04LX-UG01激光测距仪和KUKA youBot机器人,确保了实验数据的可靠性。通过与PID控制、传统轨迹规划等方法对比,验证了该方法在运动精度、响应速度和抗干扰能力等方面的显著优势。研究成果不仅解决了篮球机器人的具体控制问题,还为其他类型运动机器人的精确控制提供了借鉴。
发布日期:2024年4月18日
https://ieeexplore.ieee.org/document/10504838
10、Adaptive Robot Behavior Based on Human Comfort Using Reinforcement Learning
使用强化学习基于人类舒适度的自适应机器人行为
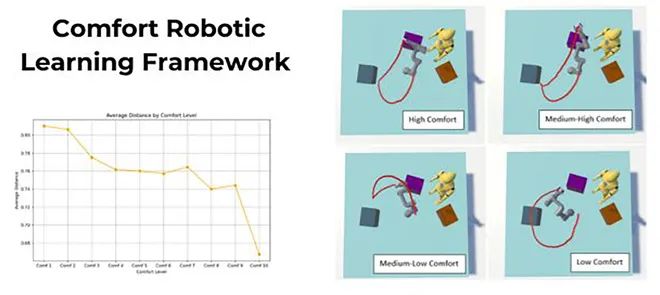
该研究探索利用强化学习技术,使机器人能够根据人类舒适度动态调整行为模式。研究团队首先构建了标准化的实验环境,包括多维度的人类舒适度评估体系和相应的数据采集系统,确保实验的可重复性和数据的可靠性。在算法层面,重点考察了舒适度相关参数对机器人行为的影响机制,通过精心设计的奖励函数,将人类主观感受转化为可量化的评价指标。实验结果表明,即使仅调整单个与舒适度相关的输入参数,也能导致机器人行为发生显著变化。通过大量实验验证,证实了机器人能够有效感知和响应人类需求变化,同时系统还展现出良好的自适应性和学习能力。研究虽然验证了方法的可行性,但也指出了实时舒适度量化等待解决的技术难点,为未来研究指明了方向。这一研究为开发具有情感感知能力的智能机器人提供了理论基础和实践指导,对提升服务机器人的社会适应性和用户接受度具有重要意义。
发布日期:2024年8月29日
https://ieeexplore.ieee.org/document/10658649
(文:机器人大讲堂)