
在医疗领域,连续体机器人因其出色的灵活性,在支气管镜检查、神经外科手术、眼科手术以及心血管手术等多个重要场景中得到了广泛应用。然而,传统连续体机器人的传动结构往往较为复杂,它们依赖电缆、肌腱、形状记忆合金、气动或液压系统等机械部件来实现运动传输,这在一定程度上限制了机器人的小型化发展。

图1.港科大等多校提出的磁性连续机器人用于检查
相比之下,磁性连续体机器人(MCRs)采用了一种创新的驱动方式。通过在机器人的远端布置一个或多个磁铁,使其具备磁性,从而能够利用磁场的变化实现远程、非接触的驱动。这种设计不仅省去了复杂的传输结构,还为机器人的小型化提供了有利条件。
但是磁性连续体机器人虽然已经从最初的单一磁铁嵌入发展到了具有特定磁化剖面配置(MPC)的先进设计,其灵活性也因此得到了明显提升,其目前却仍面临一个挑战:如何基于定量指标来评估不同MPC的变形能力,以便为设计出具有更强变形能力的MPC提供辅助?
▍提出新策略良方,助力变形能力飞跃提升
针对这一问题,来自香港中文大学的张立教授团队和中国科学院深圳先进技术研究院的蔡明学副研究员展开合作研究,并于近日提出了一套策略来设计和控制由模块化轴向充磁段组成的磁连续体机器人。

图2. 模块化轴向充磁连续体机器人的概念设计
他们首先采用静态伪刚体模型和基于定量指标的变形能力评估策略,对不同磁化轮廓构型的机器人变形能力进行了深入分析。并在此基础上,优化了机器人构型,并对其运动学行为进行了详细表征。
为了增强机器人的控制功能,研究团队设计了包含两个神经网络控制器的控制框架,使机器人具备两种控制模式。这两个控制器能够近似实现从机器人远端姿势或全局形状到驱动增量的映射关系,且通过模型生成的数据进行训练后,在计算时间和准确性方面均表现出色。
此外,研究团队提出了一种原型制造方法,并通过仿真和实验平台进行了多个案例演示,充分验证了机器人的良好变形能力和算法的有效性。

图3.研究成果发表相关信息
目前该研究成果已以“Magnetic Continuum Robot with Modular Axial Magnetization: Design, Modeling, Optimization, and Control”为题发表在机器人领域顶级期刊《IEEE Transactions on Robotics》上,香港中文大学为论文第一单位,其博士研究生曹燕飞和中国科学院深圳先进技术研究院副研究员蔡明学共同为论文第一作者,香港中文大学教授张立为通讯作者。
▍深入探索新路径,力促小型灵活双实现
在磁性连续体机器人研发领域,小型化与安全性是核心研究重点。虽然磁性连续体机器人在小型化方面已取得一定进展,但其灵活性仍不及采用其他驱动方式的连续体。
此前,有研究人员尝试使用磁性软材料,如混合铁磁微粒的硅胶或水凝胶,来推进这一目标。但与传统永磁机器人设计相比,这些材料需更强外部磁场才能达到相当变形效果,因其在相同尺寸下磁性较弱。为提高灵活性,有研究人员尝试运用磁化编程技术,通过嵌入两个相反磁化的磁体实现不同变形形状,但这增加了原型破裂时留在体内的安全风险。另该研究团队在先前的研究中曾提出了均匀磁场驱动的磁连续体磁矩在线编程新概念,采用聚合物相变技术或形状记忆合金驱动,使机器人在导航过程中获得不同磁矩组合,但该方法的实现需复杂结构设计和耗时的加热、冷却过程辅助。
在这一研究背景下,由香港中文大学张立教授团队和中国科学院深圳先进技术研究院蔡明学副研究员组成的研究团队,对磁性硅胶连续体的定制化磁化轮廓构型进行了深入探索。
如图2(c)所示,非轴向磁化轮廓构型在不同的径向方向上呈现出不同的磁力分布。尽管不同的非轴向磁化设计已被证明适用于不同的任务,但在图2(c2)中可以观察到工作空间具有不对称性。相比之下,轴向磁化轮廓构型使机器人在不同的径向方向上具有相同的磁力分布,从而确保了机器人工作空间的对称性,并有利于简化机器人的控制(如图2(c1)所示)。
此外,研究团队指出,目前尚未有学者对具有不同磁化轮廓构型的机器人的变形能力进行定量评估,但这一评估对于指导磁化轮廓构型设计至关重要。因为虽然模块化轴向磁化轮廓构型中不同的磁化组合可以赋予机器人不同的变形能力,但根据他们的研究结果,机器人的变形能力并不会随着磁化轮廓构型的复杂程度的增加而自然提升。同时,优化的磁化轮廓构型对于实现精确的机器人控制和提升性能也至关重要。为了解决这些问题,研究团队专注于研究模块化轴向充磁连续体机器人的设计,并探索基于学习的控制方法(如图2(b)所示)。
▍进行两大深入研究,奠定机器人构型优化基础
在相关研究工作中,研究团队对基于定量指标的磁连续体变形能力评估策略和基于神经网络的多模式机器人控制算法进行了深入分析。
1. 基于定量指标的磁连续体变形能力评估策略的研究
针对模块化轴向充磁连续体机器人,研究团队建立了其在永磁体和进给运动驱动下的运动学模型,并在此基础上提出了基于定量指标的变形能力评估策略。
该研究中,团队首先对其所提出的模块化轴向充磁连续体机器人在永磁体和进给运动驱动下的运动学进行了建模。如下图所示,该磁连续体机器人由主动弯曲模块和被动弯曲模块组成,其中主动弯曲模块能够通过可编程磁场形成不同形状,被动弯曲模块则在进给运动下被动变形,两者共同赋予机器人导航和变形能力。由于机器人本体的连续体特性及软材料、外部磁场等的非线性特性,其导航和变形表现出高度非线性。因此,研究团队将机器人运动学近似为准静态问题,并采用了伪刚体模型与基于势能的方法相结合,对机器人在进给运动和外部磁偶极子驱动下的正向运动学进行了建模。
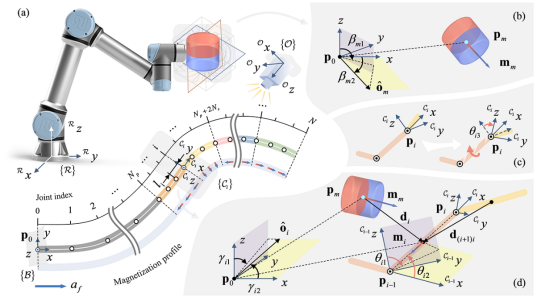
图4. 机器人在进给机构和机械臂磁控系统驱动下的运动学建模
在运动学建模的基础上,研究团队提出了一种基于定量指标的变形能力评估策略,以优化磁连续体机器人的磁化轮廓构型。他们分析了六种不同轴向磁化轮廓构型(MPC1-MPC6)在四种驱动场景下的变形能力差异,发现MPC3的机器人能在C和S形状之间切换,表现出相对出色的性能。为了直观研究这些构型的变形能力,团队记录了变形过程中的连杆角度,并定义了变形能力指标进行评估。结果显示,采用MPC3的机器人在多个维度上变形能力优异,因此选择MPC3进行后续研究。

图5. 具有轴向和非轴向磁化轮廓构型的磁连续体的变形曲线分析

图6. 具有不同轴向磁化轮廓构型的磁连续体的变形能力分析
此外,研究团队还通过运动学模型对具有MPC3磁化轮廓构型的磁连续体机器人进行了表征,分析了其在磁铁平移、旋转以及进给机构驱动下的变形行为。结果表明,机器人能够在不同磁铁极性和平移方向下从S形过渡到C形,且在特定条件下通过磁体的同时旋转和平移实现平滑变形。同时,当在磁体平移、旋转和进给联动时,机器人能以稳定的远端姿态前进,这为后续实现机器人远端位置、方向及全局形状的精确控制提供了可能。
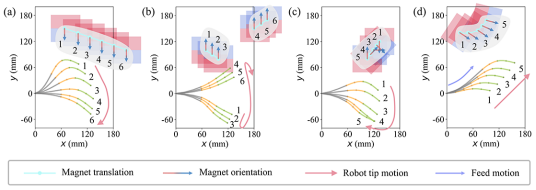
图7. 具备磁化轮廓构型MPC3的磁连续体机器人在永磁体和进给机构驱动下的变形行为表征
2.基于神经网络的多模式机器人控制算法的研究
研究团队设计了两种控制模式来增强机器人的功能并验证其变形能力。其中,控制模式1专注于控制机器人的远端位置和方向,而控制模式2则用于调控机器人的全局形状。由于正向运动学建模过程中存在优化难题,且从驱动空间到任务空间的映射关系不完全清晰,研究团队采用了数据驱动的方法来构建这两个映射关系。为此,他们设计了两个基于神经网络的控制器,并通过监督学习的方式进行训练,以逼近这两个映射。
为了方便起见,两个神经网络采用了相同的初始架构,但训练过程相互独立,不共享网络参数。每个网络都单独获得了其最终的参数。这两个神经网络的架构由八个隐藏层组成,每层神经元的数量呈现先增加后减少的金字塔模式。训练数据对是通过正向运动学模型,对驱动空间进行探索采样获得的。此外,研究团队还采用了多种训练策略来优化和提高模型性能,包括批量归一化、早期停止、动量和权重衰减等。特别值得一提的是,他们采用了一种特殊的学习率调度方法——热启动的余弦退火,通过定期以余弦形状的方式降低学习率,然后将其重置为初始值,以实现更好的收敛效果并潜在地逃离不良局部最小值。

图8. 机器人控制系统架构(硬件和软件)和神经网络控制器的训练
研究结果显示,验证集的平均均方误差在第339个epoch后达到最小值3.817,在第387个epoch后达到另一个最小值3.678。在这两个时期之后,训练损失继续逐渐减少,而验证损失不再减少。因此,研究团队选择了验证集中最小平均均方误差对应的模型参数作为最终模型参数。
此外,该研究训练的模型在实时跟踪过程中的计算速度远远高于现有研究。每次迭代期间,学习控制器的平均计算时间大约为5×10^(-6)毫秒。这表明该方法在机器人实时控制方面具有巨大潜力。
▍提出原型制造方法,实验验证机器人性能
为了验证所提出策略的有效性,并深入了解控制算法及机器人性能表现,研究团队制作了机器人原型并进行实验测试。
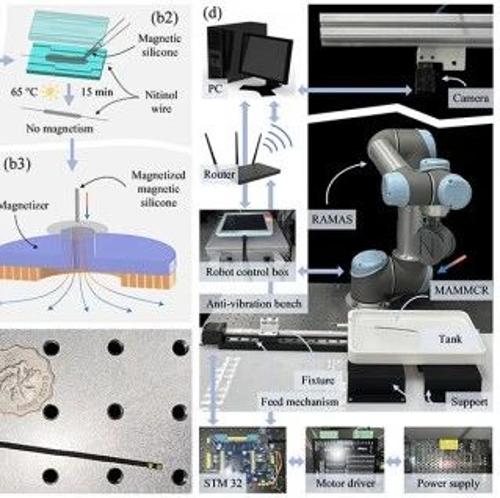
在机器人原型制作方面,研究团队采用了磁性增强硅胶,其磁性颗粒比例高达80%(按重量计),远高于现有磁机器人。通过特定比例的混合和疏水处理,他们成功制作出了具有良好磁性和流动性的机器人原型。实验系统则包含了磁连续体、机械臂磁控系统、进给机构、摄像头等多个组件,整个装置放置在防振台上,实现了自动化实时控制。

图9. 机器人原型制作和实验系统搭建
1.机器人远端位置和方向的控制
在机器人远端位置和方向的控制方面,研究团队设计了控制模式1,并在两种场景下进行了测试。第一种场景是控制机器人跟踪四叶草的轮廓,第二种场景是控制机器人远端跟踪以倾斜方式排列的字母组合“CUHK”。通过设计的算法,磁控系统中的磁铁能够无缝地调整其位置和方向,实现机器人远端的连续运动和尖端方向的平滑变化。实验结果表明,控制模式1下的最佳控制性能指标表现优异。

图10. 控制模式1下机器人进行四叶草轮廓跟踪的演示

图11. 控制模式1下机器人进行CUHK跟踪的演示
2.机器人全局形状的控制
同时,研究团队也测试了机器人在控制模式2下的全局形状控制性能。他们期望机器人能够准确地调整由三个状态量在导航过程中确定的全局形状。实验结果显示,尽管与模拟相比,实验结果的收敛性能稍差,但机器人形状的准确跟踪证明了算法的有效性和机器人良好的控制性能。在控制模式2下,机器人也取得了较佳的控制性能指标。

图12. 控制模式2下机器人进行全局形状跟踪的演示
▍关于未来
展望未来,研究团队计划进一步开发能够在线学习的误差补偿器,以提升机器人的跟踪性能。同时,他们还将考虑采用光纤布拉格光栅和超声波等反馈机制,以拓展机器人在动物离体或体内应用方面的潜力。
参考文章:
https://doi.org/10.1109/TRO.2025.3526077
(文:机器人大讲堂)