
大象的象鼻是一种生物学上的奇迹,它不仅是鼻子的延伸,更是一个多功能、高度灵活的器官。象鼻由数万个肌肉单元组成,这些肌肉单元错综复杂地交织在一起,赋予了象鼻无与伦比的灵活性和力量。大象能够精确控制象鼻的每一个微小动作,从轻轻抚摸同伴到举起重达数百公斤的物体,展现了其惊人的控制能力。象鼻的末端具有类似于手指的突起,称为“鼻指”,这使得大象能够进行精细的操作,如拾取小果实或解开绳结。此外,象鼻还具备敏锐的嗅觉,能够探测到远处的水源或感知潜在的危险。这种独特的生物学结构不仅使大象在自然界中占据了独特的生态位,也为人类在机器人技术领域提供了宝贵的灵感。

▍引解决负载能力与灵活度权衡,提出空中柔性机械臂AET
受象鼻这一出色的灵活运动能力启发,科研人员就“如何在空中机器人中实现类似功能,以提升其在不同受限环境中的操作能力”进行了长期探索。
来自香港大学的研究团队进行了深入研究,成功研发出了一款名为AET的飞行机械臂。AET不仅能在空中实现类似象鼻的绕取物体功能,更具备了在复杂受限空间中导航、避障、抓取的能力,有效打破了空中机械臂负载能力与灵活性之间的限制。
AET仅仅依赖一个小型四旋翼作为飞行平台,紧凑地结合了高自由度的连续体机械臂。AET系统的完整软硬件架构是其核心优势,结合精准的在线机械臂形状估计与自主全身运动规划及控制能力,显著提升了其在飞行中执行柔性操作任务的成功率。
在实验中,团队利用强大的硬件系统对连续体机械臂的基本特性进行了全面验证,测试了包括最大弯曲范围、弯曲速度以及末端负载上限在内的关键参数。随后,深入分析了机械臂在其有效工作空间内的灵巧性分布,为优化运动规划策略提供了重要依据。此外,还评估了几何构型求解器的精度(该求解器基于驱动肌腱长度)以及基于逆运动学模型的闭环末端姿态控制效果,确保系统的高精度和稳定性。
基于这些详尽的评估结果,研究团队进一步开展了避障和物体缠绕任务的实验,充分验证了系统的实用性。同时,通过对AET飞行控制系统的评估,团队也确认了其在空中操作任务中的高效性能。最终,通过一系列复杂的空中操作任务,研究团队成功展示了其卓越的灵巧性和柔顺性。AET不仅在缠绕各种不规则形状和大小的物体时表现出色,还能在半封闭的受限环境中灵活穿行。此外,在复杂、非结构化且充满障碍物的环境中展现了强大的空中抓取能力。最后,通过结合综合运动学模型的自动全身规划实验,进一步证明了其在复杂任务中的高效性和适应性。
这些实验不仅验证了AET系统的多功能性和适应性,还为其在管道维护、高空电线检查等复杂环境中的应用奠定了坚实基础。AET的成功研发标志着空中操作机器人技术的重大突破,为未来在危险或难以接近的区域执行任务提供了全新的解决方案。

目前,研究成果的相关论文已以“A dexterous and compliant aerial continuum manipulator for cluttered and constrained environments”为题发表在《Nature Communications》上。
那么,该研究成果具体过程如何呢?接下来和机器人大讲堂一起来进行深入了解~
▍深度融合四旋翼和连续体机械臂,AET系统设计与介绍
为了实现小型四旋翼飞行器搭载的紧凑驱动系统,研究团队采取了三大关键策略:首先,减少了电机数量,从而降低了系统的复杂性和重量;其次,设计了紧凑的结构布局,使驱动系统能够高效集成在有限的空间内;
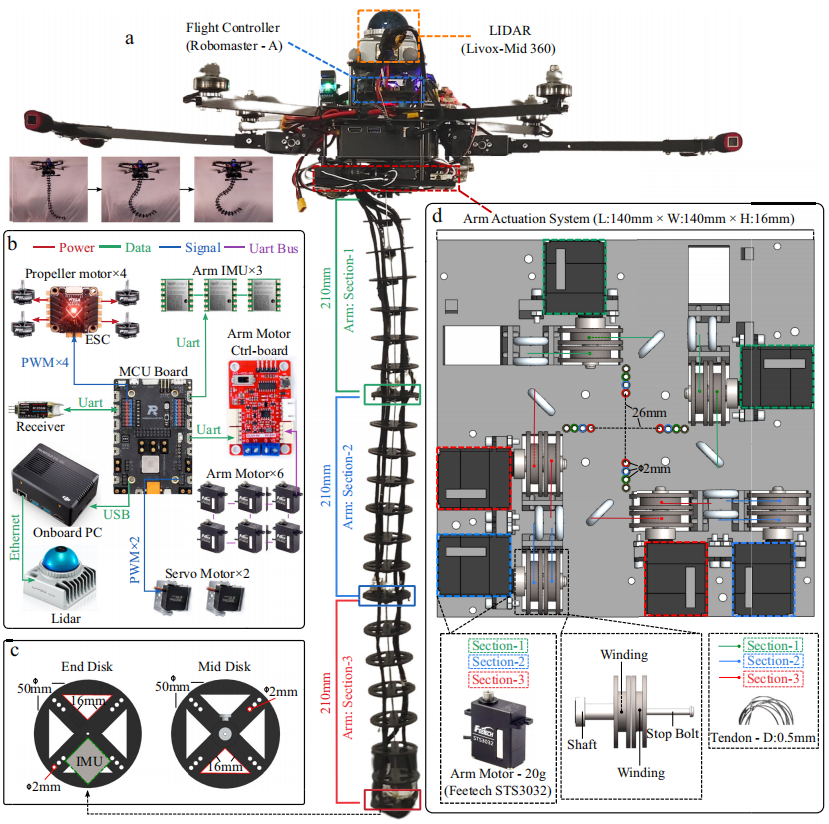
最后,采用了基于控制器的方案,有效防止了肌腱松弛问题,确保系统的稳定性和可靠性。
此外,所有电机水平排列在同一平面内,从而最大限度地降低了驱动系统的高度。通过使用多个铁环来引导每根肌腱的路径,确保它们不会相互交叉。这种紧凑的结构设计使得驱动系统能够与轻量级四旋翼飞行器无缝集成,不仅提升了便携性,还增强了系统的功能性。这一创新设计为飞行器在复杂环境中的高效操作提供了更多可能性。
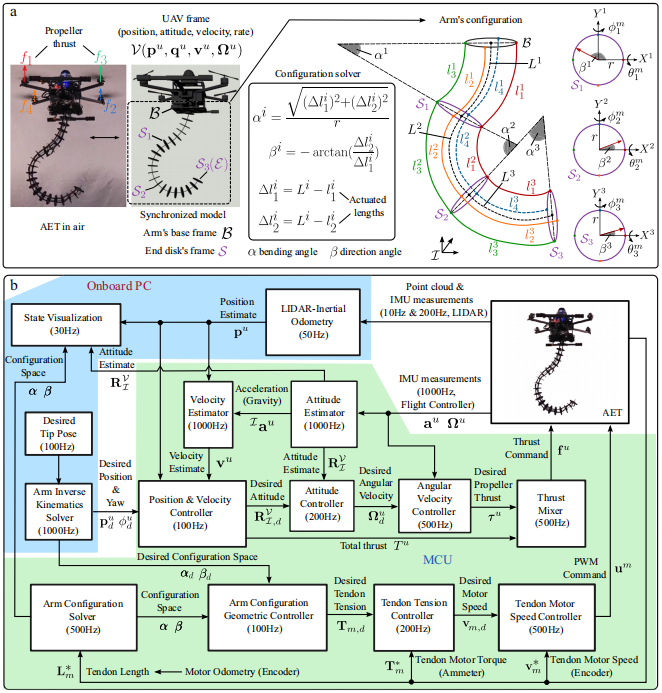
AET研发了集飞行控制和机械臂控制于一体的软件架构,大大减少了硬件系统冗余度,同时为了可视化飞行过程中的状态变化,研究团队还开发了一个仿真环境能实时跟踪实物。
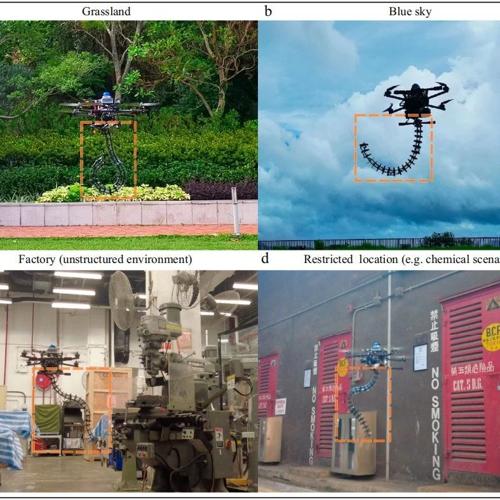
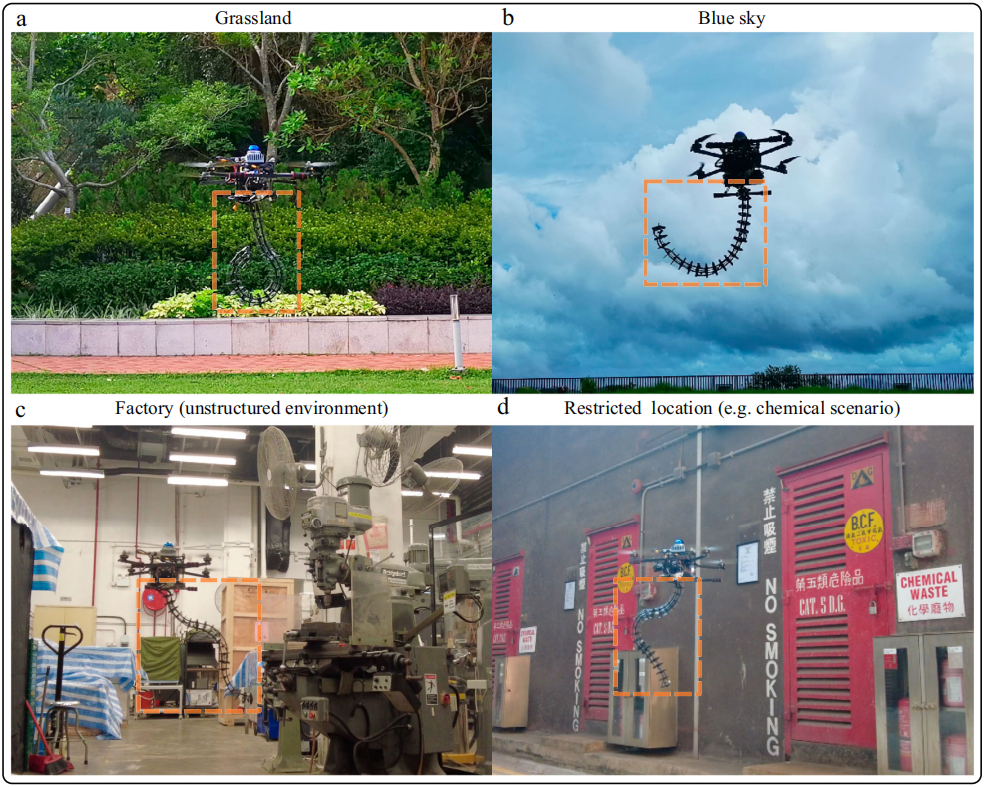
AET展现了卓越的适应能力,能够应对不同形状、大小和姿态的物体,这一能力通过一系列对传统夹爪来说极具挑战的场景得到了充分展示。重点关注了三种特定情况:水平放置的柱子、垂直放置的柱子以及形状不规则的长凳。使用夹爪缠绕这些物体的主要困难在于它们的尺寸;较大的半径对即使是大型夹爪也构成了显著挑战,如果未能抓住重心附近,夹爪很容易失去平衡。
为了解决这些挑战,利用了AET独特的全身操作能力,这是传统空中机械臂所不具备的特性。缠绕过程被分为四个连续步骤:接近、缠绕、运输和释放。在图中,AET以顶部弯曲的形状接近水平柱子,利用其全身形成一个O形,无需夹爪即可有效缠绕柱子。这一复杂运动是通过空中平台的轨迹控制和连续体机械臂的构型控制同步实现的,所需的无人机轨迹和机械臂构型由远程操作员实时动态提供。
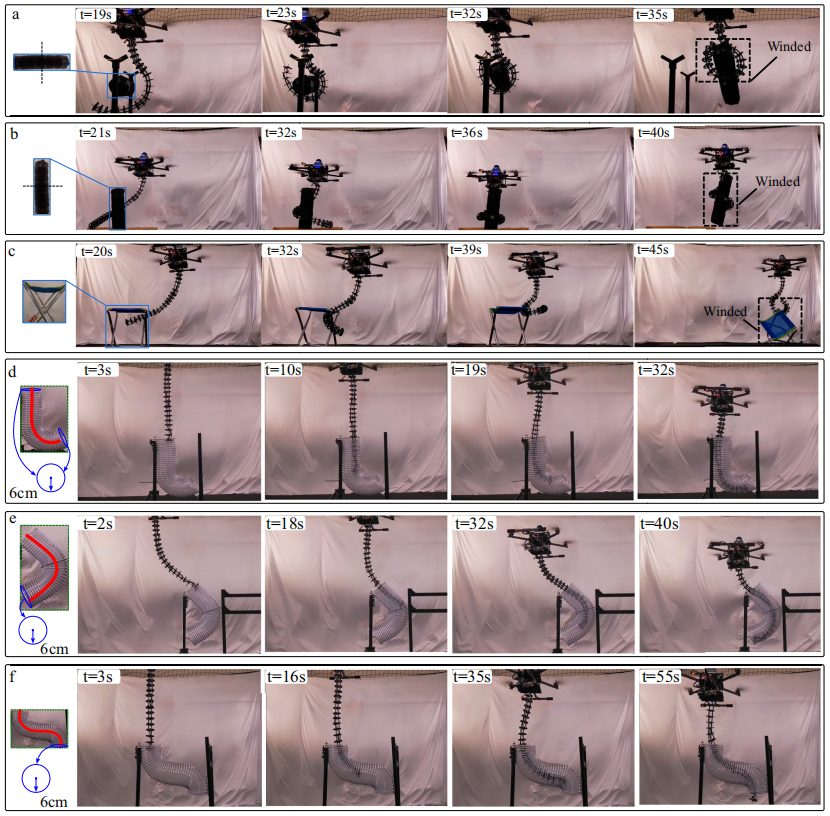
对于垂直柱子的场景,AET的接近方式与之前的O形缠绕不同。考虑到柱子可能在运输过程中滑动,AET采用螺旋形状多次缠绕柱子,确保牢固抓握并防止滑动。最后涉及缠绕一个形状不规则的长凳,这一任务在使用夹爪时充满挑战和风险,然而,AET的多功能性在此得到了充分体现,通过接近长凳并利用连续体机械臂的闭环构型控制缠绕角落,如图所示。缠绕完成后,AET将长凳运输并释放到指定位置。
为了展示AET在受限或半封闭环境中的操作能力,采用了一个包含L形、C形和S形弯曲的管道来模拟这种极具挑战性的场景。这种管道具有细长(半径为6厘米)、半封闭和独特形状的特点,对传统的刚性连杆空中机械臂构成了显著困难。
根据管道的具体形状,预定义了机械臂的构型,并在人类远程操作的指导下执行所需的跟踪运动。AET成功穿过了这些复杂弯曲形状的管道,展示了其卓越的适应能力。成功的关键在于AET固有的连续运动能力。其连续弯曲的特性使其能够无缝适应管道的曲折和狭窄空间。
这一实验不仅验证了AET在复杂环境中的灵活性和适应性,还为其在管道检查、灾难救援等实际应用中的潜力提供了有力证明。通过克服传统机械臂在受限环境中的局限性,AET为空中操作技术的发展开辟了新的可能性。

在人类远程操作和预定义跟踪运动的指导下,研究团队也就AET在充满障碍物的复杂杂乱环境中的操作能力进行了验证。在图中,精心布置了几个堆叠的箱子,形成一个垂直间隙,并将一个待抓取的物体放置在其中一个箱子下方。挑战的核心在于两个箱子之间的长而窄的间隙。为了成功穿过间隙并抓取物体,机械臂必须展现出卓越的灵活性;否则,当机械臂延伸以接近磁性物体时,无人机可能会与箱子发生碰撞。为此,在机械臂末端配备了磁铁。
在第二个实验中(图b),进一步增加了空中操作任务的复杂性。物体被放置在一个带有圆形孔洞的半封闭箱子内。空中机械臂必须穿过这些孔洞进入箱子,随后避开障碍物以最终到达物体。由于孔洞尺寸较小(半径为5厘米),传统的刚性连杆空中机械臂难以进入箱子,更不用说绕过障碍物抓取物体。然而,如图b所示,AET巧妙地通过孔洞进入箱子,避开障碍物并成功抓取物体,展示了其在高度复杂环境中的操作能力。
最后,在图c中,环境的复杂性进一步提升。假设物体只能通过透明箱子的圆形孔洞进入。为了清晰展示机械臂的运动,确保物体的前后两侧未被遮挡。这一任务极具挑战性,因为空中机械臂必须穿过透明箱子顶部和右侧的两个孔洞(用橙色圆圈标出),然后弯曲机械臂以到达物体。凭借其灵巧性和柔顺性,AET成功完成了这些任务,如视频所示。
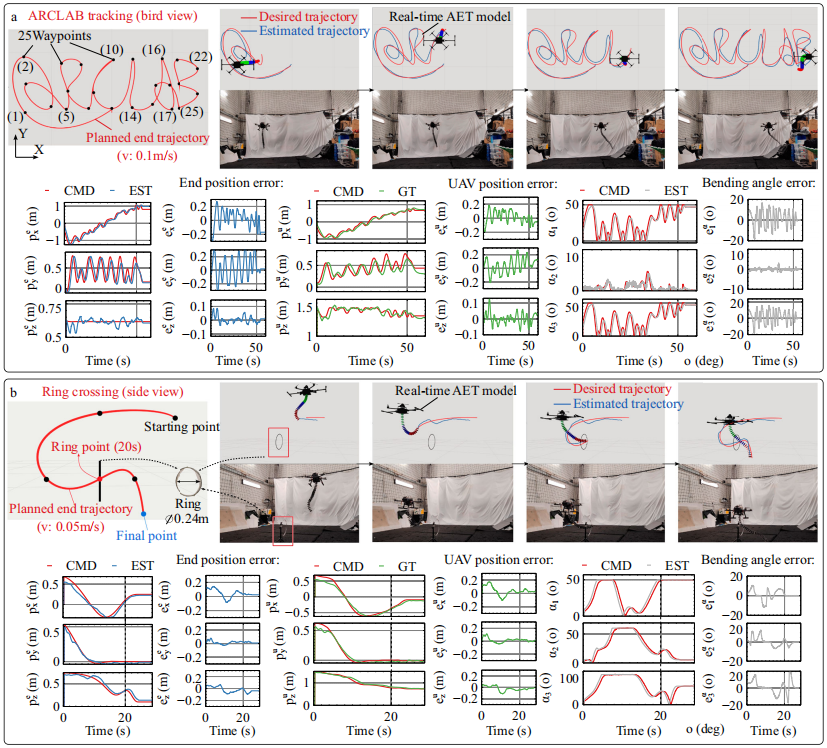
基于开发的全身运动规划技术,利用AET执行了自动空中运动任务。设计了两项空中运动任务:空中书写和空中穿越。在这两项任务中,仅预定义了路径点,所有运动规划和控制均在机载实时计算,无需人工干预。
在图a中,建立了一系列路径点以在水平平面上生成字母序列“ARCLAB”,保持与初始末端高度相同的高度,并指示AET的末端执行器跟踪这一一致的轨迹。轨迹是基于末端在世界坐标系中的初始姿态动态在线规划的。在整个跟踪过程中,逐步显示期望的末端轨迹和通过前向运动学估计的末端轨迹,并与时间轴同步,以评估跟踪性能。同时,记录了末端位置、无人机位置以及三个连续体臂段弯曲角度的实验数据,并与各自的指令进行比较。结果清晰地展示了在轨迹速度为0.1 m/s下的跟踪响应和误差。
在图b中,引入了一个直径为0.24米的静态环作为受限空间。设置了一些路径点,引导AET穿越环并到达最终目标位置。通过开发的运动规划和跟踪控制器,AET能够在线生成平滑轨迹,并跟随轨迹成功穿越环并到达最终目标,全程无需人工干预。这一无缝过渡运动在25秒内成功完成,而手动操作则需要超过60秒。这些实验充分展示了AET在空中的操作能力。
这些实验不仅验证了AET在复杂任务中的自主规划和控制能力,还为其在自动化检查、空中绘图等实际应用中的潜力提供了有力证明。通过实现高效、精准的自主操作,AET为空中机器人技术的发展开辟了新的可能性。
参考文章:
https://www.nature.com/articles/s41467-024-55157-2
完整视频:
https://www.bilibili.com/video/BV1k9fGYhE2Z
(文:机器人大讲堂)