

在过去的数十年间,机器人系统领域经历了迅猛的发展,不断涌现出更为先进的电子设备、机械组件以及软件解决方案。然而,软机器人复杂的结构和材料组成使其生命周期管理面临巨大挑战,包括难以修复、升级困难以及随之而来的资源浪费和可持续性问题。
近日新加坡科技设计大学研究人员最近推出了一种持续升级软机器人的方法,该方法采用原位自由形态液体三维打印(iFL3DP)技术,制造出了一个类似鳐鱼的软机器人,并在软机器人身上增加了触觉传感器、被动触须阵列和驱动钩,同时研究人员还修复了机器人合成皮肤被触须撕裂和损坏的部分。目前该研究论文已在《Science Robotics》期刊发表。
▍研究团队采用FL3DP技术 解决软机器人生命周期管理问题
软机器人结合了软质或混合材料,通过复杂的组装和拆卸流程制造而成,这种特性虽然赋予了它们出色的功能性、灵活性和鲁棒性,但也带来了显著的维修和升级难题。传统方法如铸造和模塑在制造复杂几何形状和多材料组件时面临巨大挑战,特别是在软机器人已经组装完成后,对其进行功能升级或组件修复几乎是不可能的。此外,软机器人生命周期短、维修复杂,导致了大量废弃物的产生,严重违背了可持续发展的原则。
随着增材制造(AM)技术的发展,尤其是自由形态液体三维打印(FL3DP)技术的出现,为解决软机器人生命周期管理问题提供了新的思路。FL3DP技术通过利用屈服应力凝胶作为临时支撑材料,能够实现低粘度墨水或长固化动力学材料的挤出,以及悬垂结构和高纵横比结构的制造。然而,传统FL3DP方法需要将打印对象完全浸没在支撑凝胶中,这极大地限制了可用的工作空间。
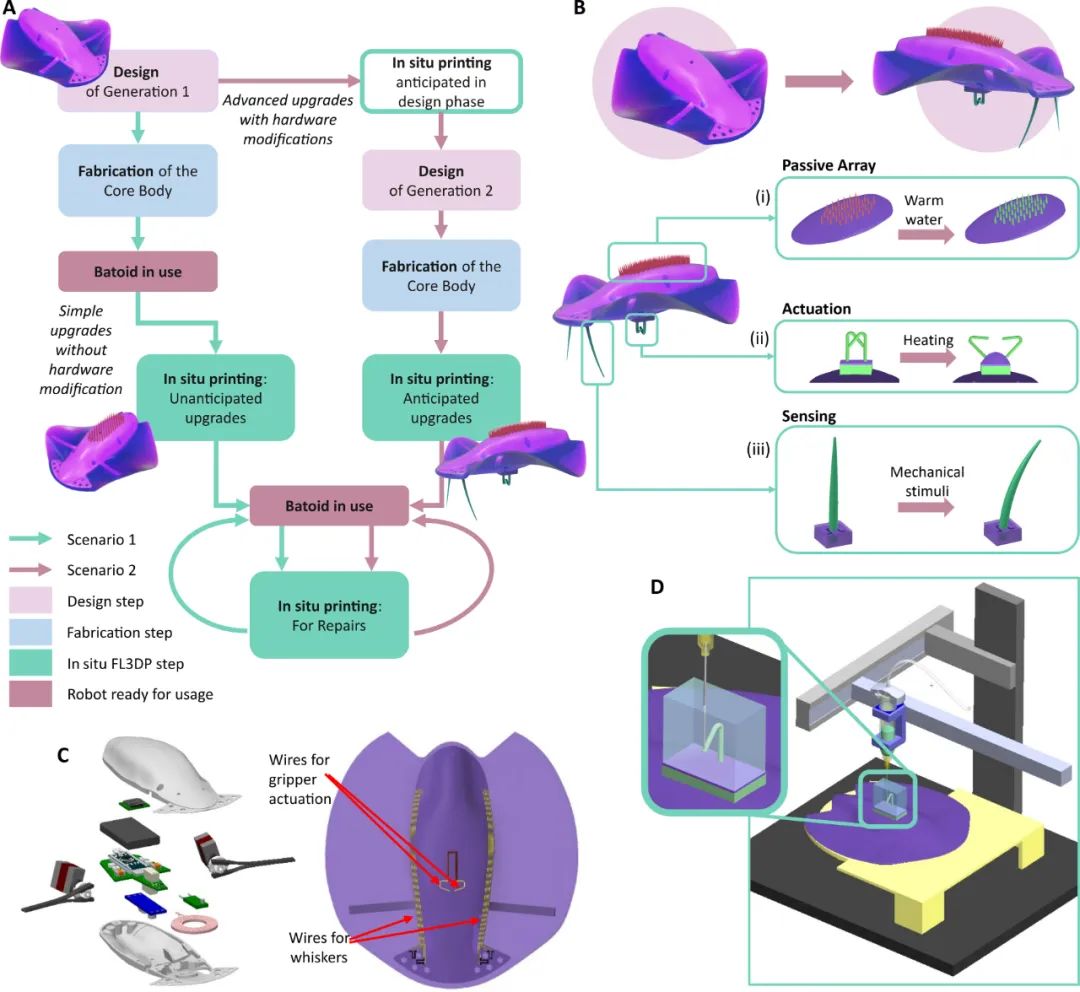
为此研究人员提出的iFL3DP技术通过直接在机器人表面沉积定制体积的支撑凝胶,实现了在有限空间内对软机器人进行局部打印和功能升级,为软机器人的生命周期管理提供了革命性的解决方案。
▍iFL3DP技术原理与实现过程
iFL3DP技术结合了直写打印(DIW)和FL3DP的优势,通过DIW技术在机器人表面沉积一层薄的屈服应力凝胶作为支撑,随后使用FL3DP技术打印功能组件。该局部沉积支撑凝胶的方法极大地减少了所需的支撑材料体积,同时避免了传统FL3DP方法对大工作空间的依赖。
在打印过程中,研究人员通过DIW技术在机器人表面打印一层薄的弹性体材料(如Ecoflex 00-30),作为新组件与机器人本体之间的粘合层。之后在粘合层上沉积屈服应力凝胶支撑材料(如基于Laponite的凝胶),并使用FL3DP技术打印复杂的多材料功能组件。打印完成后,通过简单的水洗即可去除支撑凝胶,实现新组件与机器人本体的无缝集成。
研究中使用的材料主要包括弹性体材料(Ecoflex 00-30和Smooth-Sil 960)、导电材料(碳导电油脂)和屈服应力凝胶支撑材料(基于Laponite的凝胶)。这些材料的选择基于其可加工性、与机器人本体的兼容性以及所需的功能特性。
例如,Ecoflex 00-30和Smooth-Sil 960因其良好的弹性、可加工性和生物相容性而被选为机器人本体和功能组件的主要材料。碳导电油脂则用于制备应变传感器,实现触觉感知功能。基于Laponite的凝胶因其易于制备、快速转变凝胶-液体状态的能力以及良好的支撑效果而被选为支撑材料。
三个新功能组件的iFL3DP工作流程
研究中设计了三种功能组件来升级软机器人:触觉反馈的长须传感器、抓取机制和多功能被动长须阵列。这些组件具有复杂的几何形状和多材料结构,通过iFL3DP技术成功实现了在机器人表面的无缝集成。

触觉长须传感器特征
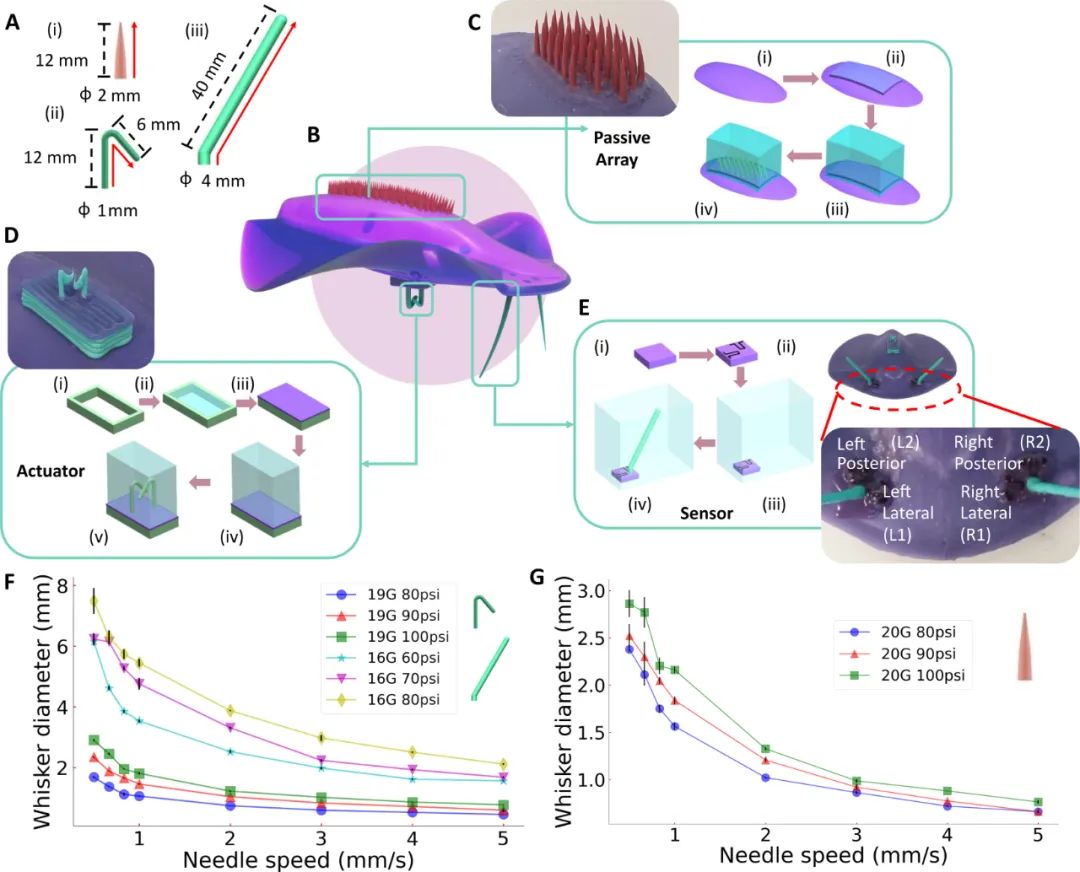
触觉反馈的长须传感器由Smooth-Sil 960制成的长须和基于碳导电油脂的应变传感器组成。抓取机制则利用低沸点液体(如Novec 71IPA工程流体)的热膨胀原理,通过加热尼铬线控制膜片的变形,实现钩状结构的开合。多功能被动长须阵列由含有热致变色颜料的Smooth-Sil 960制成,能够根据环境温度变化改变颜色,实现温度感知和样品采集功能。
在打印过程中,通过调整打印参数(如针头直径、打印速度和输入压力)来控制组件的几何形状和材料分布。例如,通过减慢挤出速度来确保长须基部的坚固性,通过均匀速度来保持长须厚度的一致性,并在针头继续运动的同时停止挤出以形成逐渐变细的长须尖端。
▍应用效果与性能评估
为了验证iFL3DP技术对于软机器人的功能性评估,研究人员直接在机器人表面进行打印,成功地为软机器人增加了触觉反馈的触须传感器、抓取机制和多功能被动触须阵列三项高级功能。
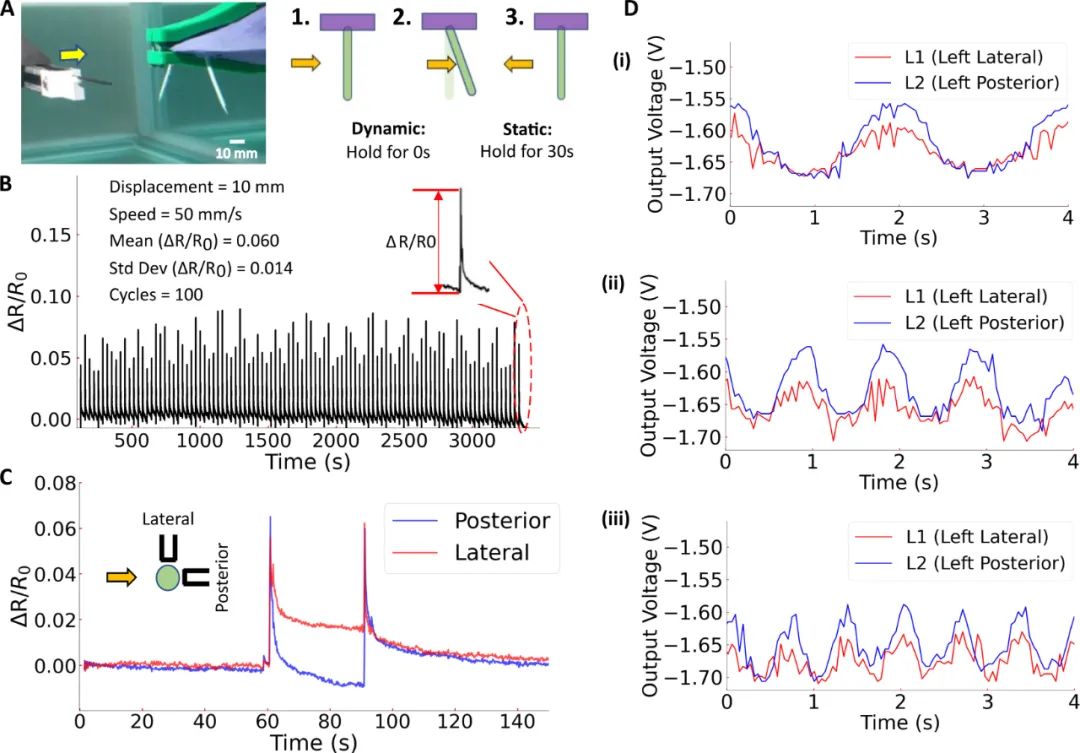
触觉反馈的长须传感器能够检测障碍物和海底纹理,为机器人提供了重要的环境感知能力。在触觉感知实验中,通过动态和静态测试评估了应变传感器的响应特性和稳定性。在动态测试中,研究人员使用一根直径2毫米的钢棒以恒定的速度和位移对触须进行水平激励,以模拟机器人在实际环境中可能遇到的动态刺激。静态测试则侧重于评估传感器在持续刺激下的响应稳定性和可重复性。在实验中,触须同样受到10毫米的位移激励,但钢棒在位移后保持静止30秒,以模拟静态负载或持续接触的情况。
通过动态和静态测试结果来看,该应变传感器具有优异的响应特性和稳定性。它能够快速且准确地检测到触须受到的动态和静态刺激,并通过电阻变化的形式将这些刺激转化为可测量的电信号。此外,传感器在长时间测试周期内表现出良好的一致性和可重复性,这对于确保机器人在复杂环境中的可靠运行至关重要。
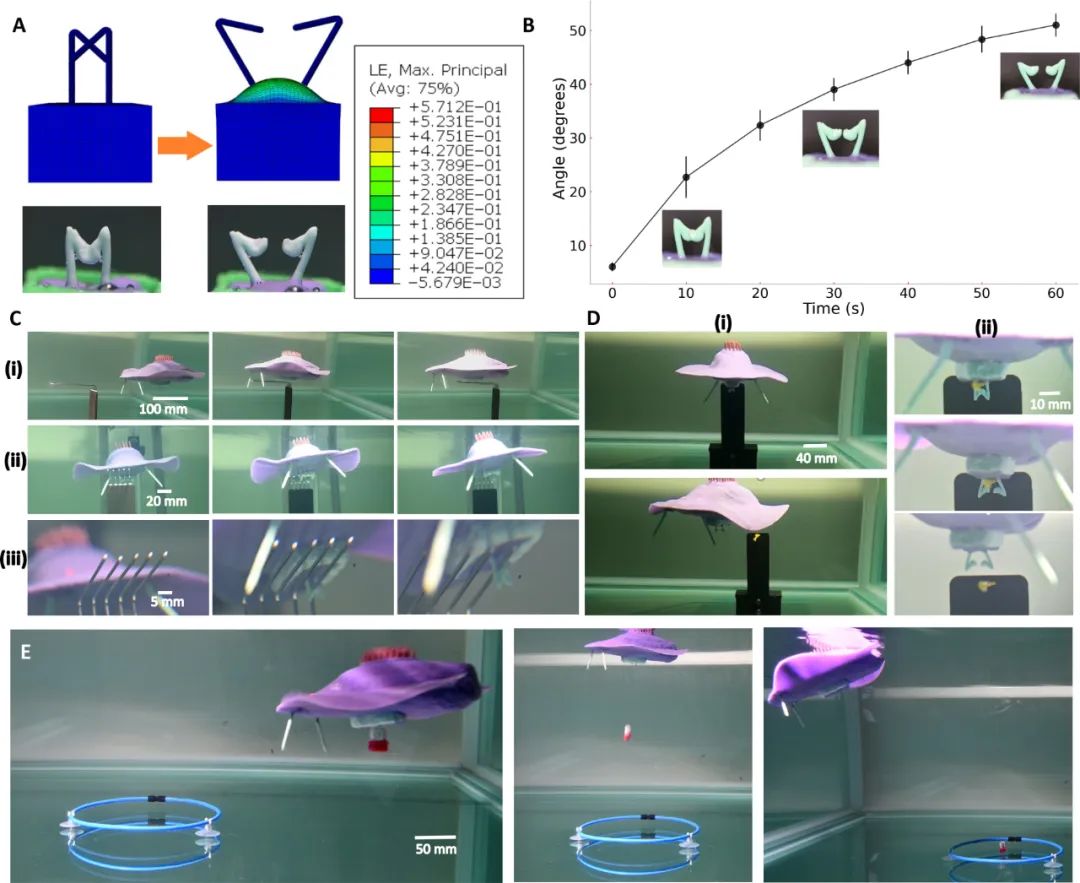
在抓取机制测试中,通过控制加热时间和温度来评估钩状结构的开合角度和响应时间。从反馈来看,钩状结构能够在预定时间内达到所需的开合角度,不仅验证了钩状结构设计的合理性,还证明了iFL3DP技术在实现复杂几何形状和功能性材料组合方面的有效性。
多功能被动触须阵列通过原位自由形态液体三维打印技术直接集成于软机器人表面,触须采用含热致变色颜料的硬硅胶材料,能随环境温度变化而改变颜色,实现被动温度传感。实验验证显示,触须阵列的温度传感功能准确可靠,颜色变化快速且可逆。在海洋探索任务中,机器人可借此监测水温,调整策略。同时,长须阵列还能够有效采集样品。
▍结语与未来:
新加坡科技设计大学研究人员提出的iFL3DP技术为软机器人的生命周期管理提供了新的解决方案。通过直接在机器人表面打印功能组件和修复受损部件,有效提升软机器人的可维护性和升级能力,同时降低了对支撑材料的依赖和后处理时间提高了打印效率和成本效益,充分延长软机器人的使用寿命。
(文:机器人大讲堂)