跳至内容
软体机器人一直被认为动作柔和但缺乏爆发力,很难实现快速、有力的动作。但最近,首尔国立大学和KIST团队在Science Robotics上发表了一项突破性研究,他们开发出一种新型的软体机器人关节机构(HeTRM),让软体机器人也能实现类似跳蚤那样的“蓄力暴击”动作。
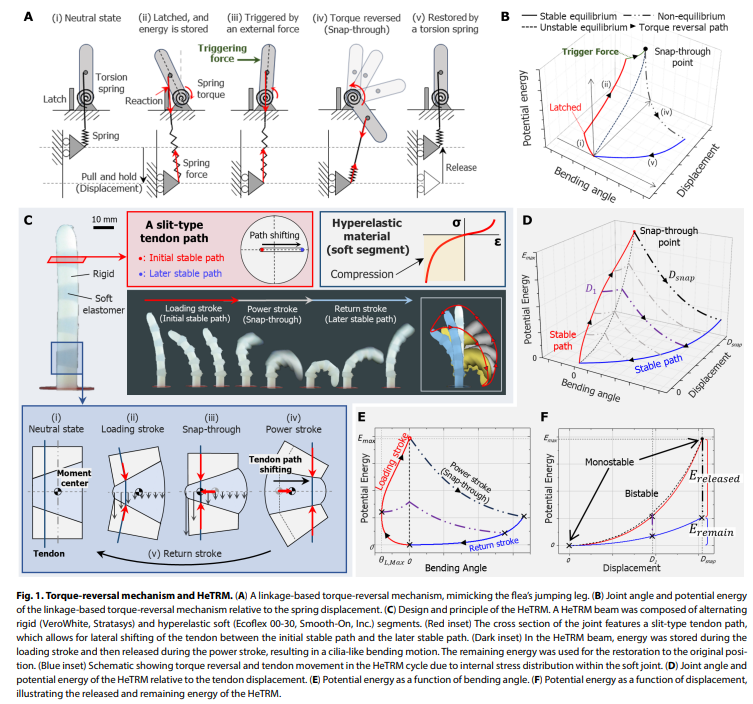
为什么跳蚤能跳那么高?其实跳蚤有一个巧妙的“扭矩反转机制”。
传统的机械臂通常需要复杂的链杆结构来实现这种机制。而研究团队的创新之处在于:他们利用超弹性材料的特性,在软体关节中实现了类似的功能。
当拉动腱索时,软段会被压缩变形。由于超弹性材料的特性,压缩越大,刚度增加越快。这导致窄端和宽端产生刚度差异,最终在达到临界点时发生扭矩反转,储存的能量瞬间释放出来。
研究人员对这一机制进行了详细的理论分析和实验验证。他们发现:
-
-
当压缩力超过临界值时,一个稳态消失,系统发生快速跳变
-
为了验证这一机制的实用性,研究团队开发了多个有趣的演示应用。
在相同的驱动速度下,普通软体关节只能在鸡蛋表面滑动,而HeTRM关节能够产生足够大的冲击力打破鸡蛋壳。测试显示它能释放超过42毫焦的能量,远超破壳所需的13-26毫焦。
研究团队基于HeTRM开发了一款创新的双模式软体抓手,它能在两种工作模式之间自如切换:
-
-
HeTRM模式则能达到850°/s的峰值速度,是普通模式的14倍!
这种双模式设计让抓手既保持了软体机器人的柔顺特性,又克服了速度慢的缺点。研究人员展示了它能稳稳接住下落的橘子(70g),甚至能够提起200g的重物。
通过巧妙设计腱索通道的位置,研究团队还实现了三维空间的复杂运动。
将多个这样的关节串联起来,就能实现类似章鱼触手那样灵活的缠绕动作:
每个关节的扭转角度错开22.5°,让整个结构能够产生螺旋形的缠绕动作。更巧妙的是,通过调节不同关节的参数,可以实现按序列触发的运动模式,确保触手能够先接近目标,再进行缠绕。
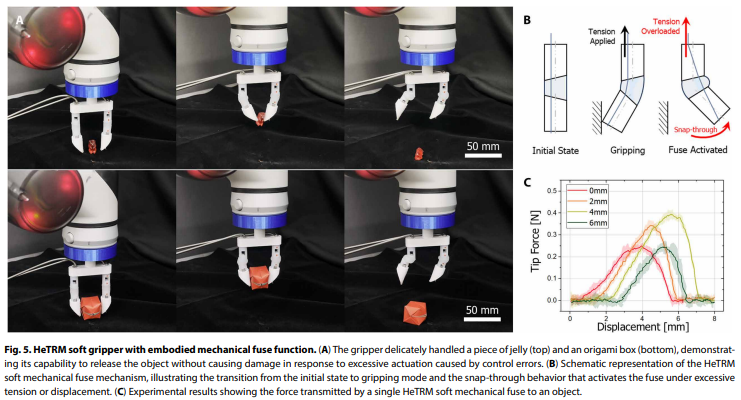
除了快速运动,研究人员还发现HeTRM的双稳态特性可以用来设计“机械保险丝”。
这个设计让抓手能够安全地处理脆弱的物品,比如果冻、番茄或奶酪,即使控制出现错误也不会造成损坏。这为人机协作场景提供了一个优雅的机械式安全保护方案。
这项研究不仅提供了一种新颖的软体机器人驱动机制,更重要的是开拓了一个将快速动态行为与软体结构结合的新思路。
但研究团队相信,这种基于材料特性的新机制将为软体机器人带来更多可能性。未来可能的应用包括:高速精确的工业操作、安全的医疗辅助设备、水下软体推进器和仿生机器人关节等。
正如论文作者所说:“我们希望这种方法能为设计具有快速动态特性的软体结构提供新的视角。”
这项研究再次证明,向自然学习往往能带来意想不到的突破。跳蚤和纤毛这样简单的生物器官,蕴含着丰富的工程智慧。随着材料科学和仿生设计的不断发展,我们离实现真正灵活、安全、高效的软体机器人越来越近了。
www.science.org/doi/10.1126/scirobotics.ado7696
(文:机器人大讲堂)