
在机器人技术快速发展的背景下,绳传动技术作为核心驱动力的重要性日益凸显,为机器人性能的提升提供了新的可能性。
在机器人的众多传动方式中,绳传动技术独具魅力。它就像是机器人的 “灵动之脉”,通过绳索的巧妙运用,赋予机器人出色的运动能力。
绳传动是一种使用绳索或带子连接轮齿来传递动力或扭矩的机械传动方式。别小看这一根根绳索,它们能在远距离内高效传递动力,还能在复杂环境中实现精准的运动控制。想象一下,在狭窄的空间里,机器人的机械臂需要灵活伸展和操作,绳传动就能大显身手。它可以实现高效、静音、平稳的传动,广泛应用于起重设备、电梯、滑动门等领域,在机器人领域更是发挥着关键作用。
▲便携式外科手术机器器人样机
▍高效传动,精准动力传输链
绳驱传动原理作为机器人绳传动技术的核心枢纽,其工作机制蕴含着高度的智慧与效率。
绳子从一端起始穿出后,沿着精心规划的特定路径绕过滑轮,巧妙地借助定滑轮传力大小恒定不变的特性,实现了动力的高效传递。当一端绳子被拉长时,另一端会精准地相应收缩,且收缩量与伸长量始终保持一致。例如绳子从 F 端穿出,然后经过 D 点,再通过滑轮绕回 E 点和 G 点,当 G 端绳子拉长时,F 端绳子会相应收缩,而由于定滑轮的传力大小不变性,其两端绳子伸长和收缩量相同,因此 F 端也会相应地收缩,其收缩量与 G 端绳子的伸长量相同。
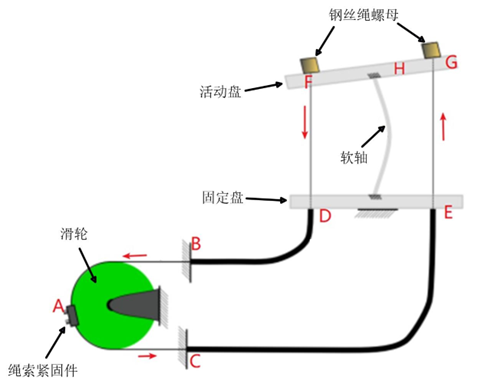
▲绳驱传动原理图
在外科手术机器人的实际应用中,手柄上经过精心定位的特定点位与目标旋转关节通过绳子和滑轮实现了精准无误的连接,滑轮稳固地固定于基架之上。当手柄向前推动时,相应点位随之产生精确的运动,进而引发绳子的伸缩变化,这一变化又能够精确无误地控制旋转关节的转动角度与方向,从而实现对机器人运动的高精度调控。这种精准且稳定的动力传递机制,确保了机器人能够严格按照预定的轨迹完成各类复杂动作,为机器人的稳定运行奠定了坚实基础。
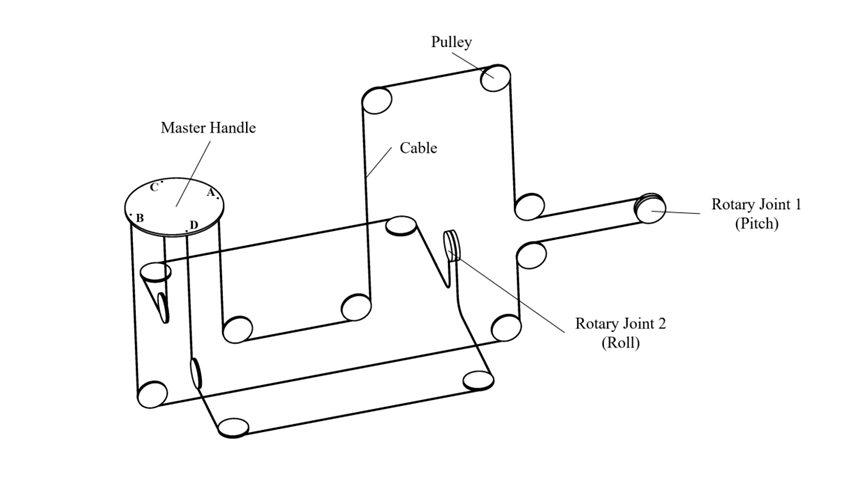
▲绳驱传动过程示意图
▍协同精妙,稳定运行守护者
为保障机器人在运动过程中的高度稳定性与精确性,绳驱平行四边形结构至关重要。基于 RCM 点(Remote center of motion,远程运动中心)在空间中的位置恒定不变这一特性,机械臂运动时特定臂之间的空间轨迹必须始终保持平行状态。
在研发过程中,马淦团队充分考量绳环绕线的方向,通过巧妙设计达成了这一目标。以常见的机器人绳驱平行四边形机构为例,其通过精心设计的特定绳子连接与缠绕方式,构建起了一个稳定且高效的协同运动体系。只要在初始时刻确保相关连接轴处于平行状态,后续无论机器人如何运动,各连接轴都能始终保持平行关系。
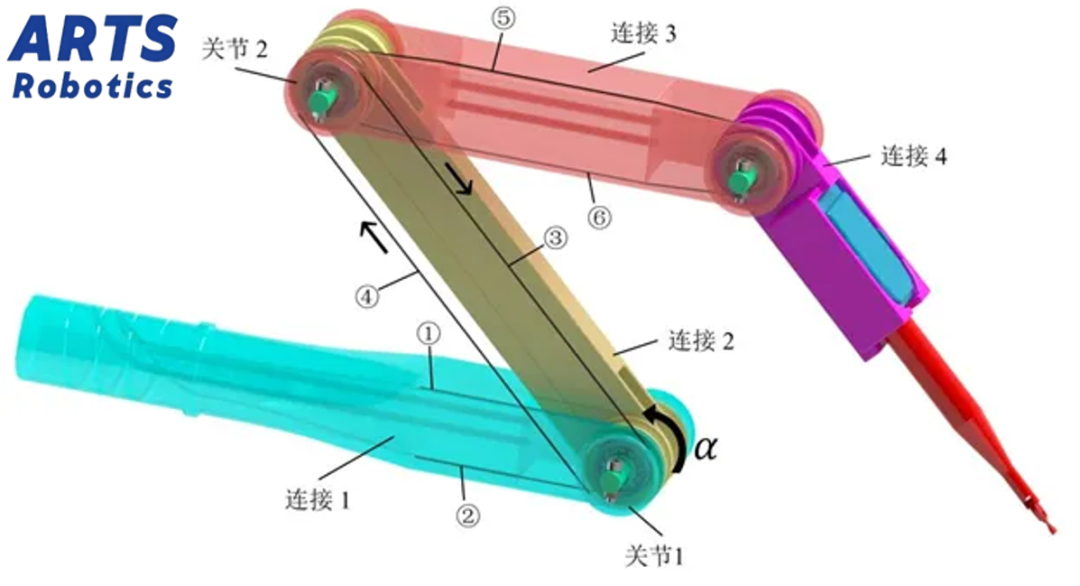
▲绳驱平行四边形机构结构图
具体而言,同一根绳子巧妙地绕过不同连接点形成环形结构,当对绳子进行拉动或释放操作时,各个连接轴的关节会依据特定的力学规律进行协同运动,且相关角度的变化始终保持高度一致。如此一来,便能确保器械末端点相对于特定关节在空间中保持静止状态,为机器人的稳定操作筑牢了坚实根基,使得机器人在执行各类任务时能够始终保持高度的准确性与可靠性,有效避免了运动偏差与误差的产生。
像达芬奇 Si 和 Xi 等型号的手术机器人采用的平行四边形机构,利用钢带(类似绳索)传动,通过合理的结构设计,保证了机械臂运动时的稳定性和精确性,满足手术操作的高要求。
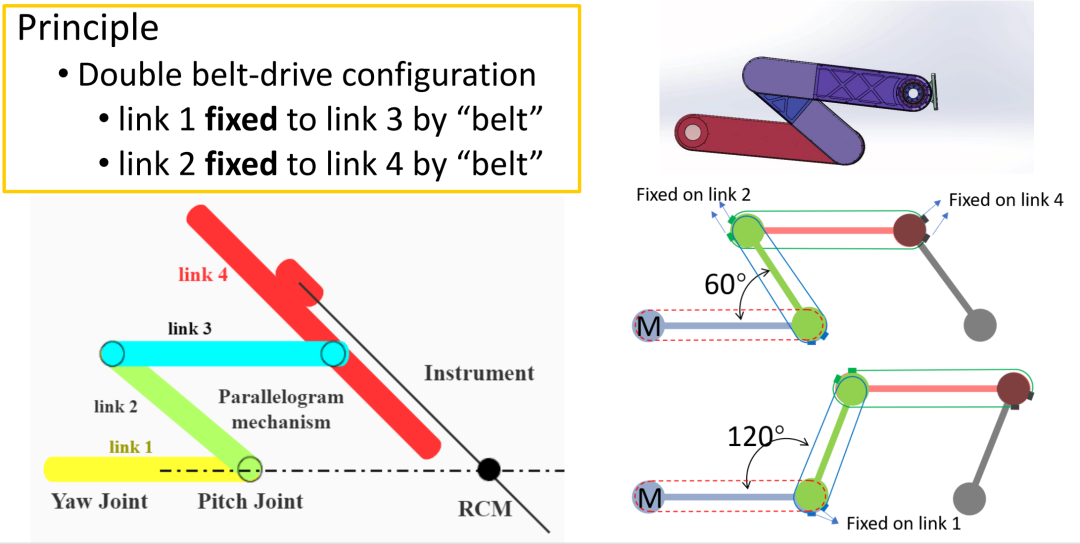
▲达芬奇手术机器人平行四边形机构传动原理
▍多样器械,驱动多关节灵动
在机器人绳传动技术广泛应用的进程中,与之适配的多样器械发挥着关键作用,进一步拓展了其应用边界。以手术机器人领域为例,丰富多样的器械类型满足了不同手术场景的复杂需求。
手术机器人常用的器械主要分为 S1 – S4 这 4 种。S1 是手腕类器械。它在负载能力、潜在尺寸、刚度和精度方面优势明显,负载和潜在尺寸大于其他几种器械,刚度较高,精度更是在这几种器械中位居榜首。S2 属于多关节器械,S3 分为单骨干或多骨干类型,S4 则是同心管器械。这几种器械在性能参数上存在差异,在负载、潜在尺寸和精度方面,呈现出 S1>S2>S3>S4 的关系;刚度方面,S1>S2>S3≈S4;潜在自由度上,S1<S2<S3≈S4。
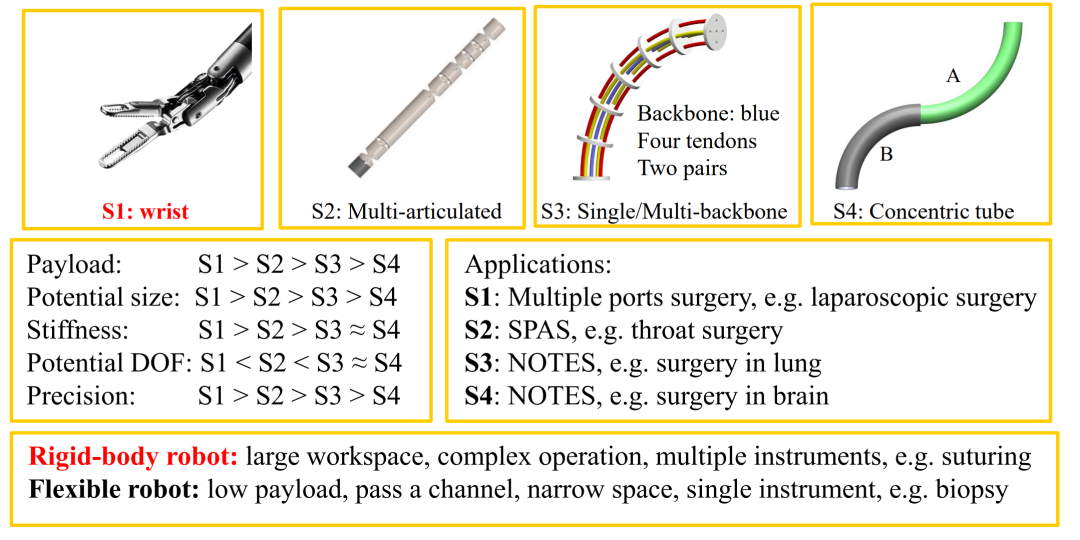
▲手术机器人器械类型对比及应用概述
不同器械适用于不同的手术场景。S1常用于多端口手术,例如腹腔镜手术,凭借其高负载、高精度和较大的运动范围,能在复杂的腹腔环境中精准操作。S2适用于SPAS 手术,像咽喉手术,其多关节设计让它可以在狭窄且结构复杂的咽喉部位灵活作业。S3 适用于NOTES手术,比如肺部手术,能够满足在体内自然腔道进行手术操作的需求。S4 也用于NOTES手术,例如脑部手术,虽然它负载较低,但在对空间和操作精度要求极高的手术场景中发挥着独特作用。
这些器械与绳传动技术紧密配合。绳传动的高效动力传输和精准运动控制,使各类器械能在手术中充分发挥自身优势。通过绳索的伸缩,精确控制器械的各个关节运动,从而实现缝合、切割、抓取等精细的手术操作动作,大大提升了手术的成功率和安全性。
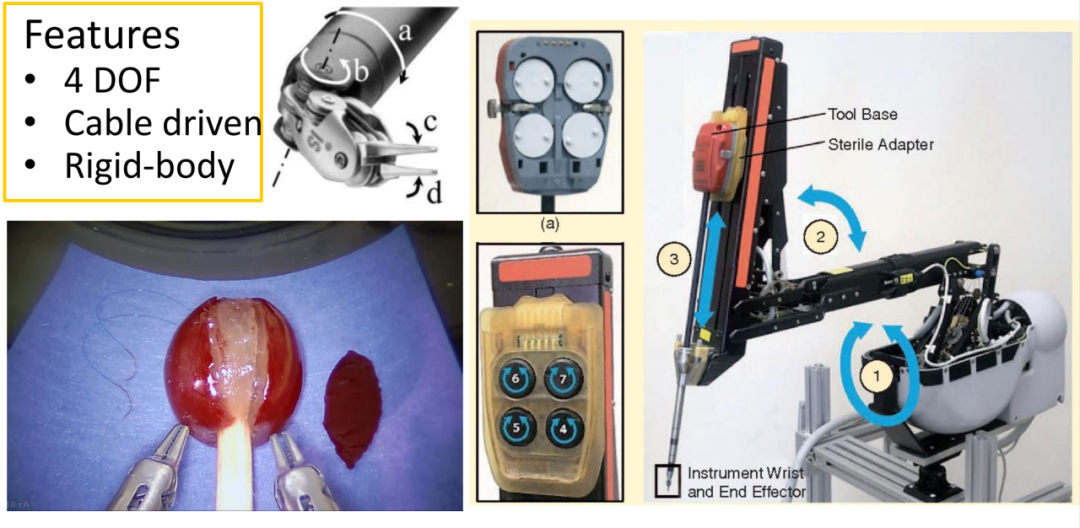
▲刚性手术机器人器械特性及操作展示
▍多元应用,推动产业创新
机器人绳传动技术在实际应用中表现卓越,为众多领域带来创新和变革。
在外科手术机器人领域,其重要性不可替代。手术要求操作精准,绳传动的高效、平稳特性正好满足需求。通过绳传动技术,外科手术机器人的机械臂能在狭小手术空间内灵活穿梭,完成复杂手术操作,大大提高手术成功率和安全性。
在特殊环境作业的机器人中,绳传动技术同样发挥着关键作用。比如在狭窄管道或危险区域进行检测、维修的机器人,借助绳传动可以在复杂环境中自由移动和操作,灵活伸展收缩机械臂,完成检测、抓取等任务,为相关行业发展提供有力支持。
机器人绳传动关键技术凭借其高效可靠的传动原理、精妙协同的运行机制以及广泛多元的器械,已然成为推动机器人技术蓬勃发展的核心力量。随着技术的持续创新与不断完善,相信在未来,它将在更多领域绽放光彩,为人类社会的发展带来更为丰富的便利,助力各行各业实现智能化转型与升级。
来源: 机器人自主移动与操作实验室
(文:机器人大讲堂)