

“
北京人形机器人创新中心发布了全球首个“一脑多能”、“一脑多机”的通用具身智能平台“慧思开物”。
作者|机器人开放社区
机器人开放社区获悉,3月12日,北京人形机器人创新中心(国家地方共建具身智能机器人创新中心)在京发布了全球首个“一脑多能”、“一脑多机”的通用具身智能平台“慧思开物”。“慧思开物”的应用是对基于单一场景单一任务做专项开发这一传统机器人应用开发模式的颠覆,同时也填补了具身智能领域在通用软件系统方面的空白,真正推动智能机器人从单一任务执行向复杂环境下的自主决策与执行能力跃升。
据了解,“慧思开物”能够实现从任务理解到执行的全流程智能化,具备处理多场景复杂任务的泛化能力,首次实现了单个软件系统在机械臂、轮式机器人、人形机器人等多构型本体上的兼容,能够适应多样化的应用场景和任务,为具身智能机器人提供强大的感知、决策与执行能力。
创新中心首席技术官唐剑表示,“慧思开物”作为机器人中枢神经系统,集成感知、决策、语言、学习及运动控制等高级认知功能,通过多专家智能体协同实现模型能力提升,增强机器人在复杂任务中的智能化与执行效率,同时通过低代码方式降低机器人开发门槛,简化开发流程。
“慧思开物”由AI大模型驱动的任务规划具身“大脑”以及数据驱动的端到端技能执行具身“小脑”构成,是支持各类机器人与物理世界交互的开放平台。其中,具身“大脑”具备自然交互、空间感知、意图理解、分层规划和错误反思等能力,具身“小脑”分为具身操作和具身运控两个子平台:具身操作涵盖元技能库、泛化抓取、技能拆解和错误处理等功能,而具身运控负责实现全身控制、双臂协作、稳定行走和移动导航等任务。由具身“大脑”进行任务规划,再调用具身“小脑”技能库执行具体动作,并将执行反馈传递给具身“大脑”,形成任务闭环。
基于高效协同的具身“大脑”与具身“小脑”架构,“慧思开物”可以精准解析自然语言交互指令,通过多模态信息融合与上下文理解,将复杂任务分解为可执行的子任务序列,并在任务执行过程中实时监测状态,通过自适应纠错机制和动态路径规划,确保任务的高效推进与准确完成。
同时,“慧思开物”内置多场景适配引擎,支持从工业制造到家庭服务等多种场景,结合高效的资源调度与并行计算能力,能够精准满足特定场景下的工作节拍与精度标准,为机器人在复杂场景的应用提供可靠的技术保障。
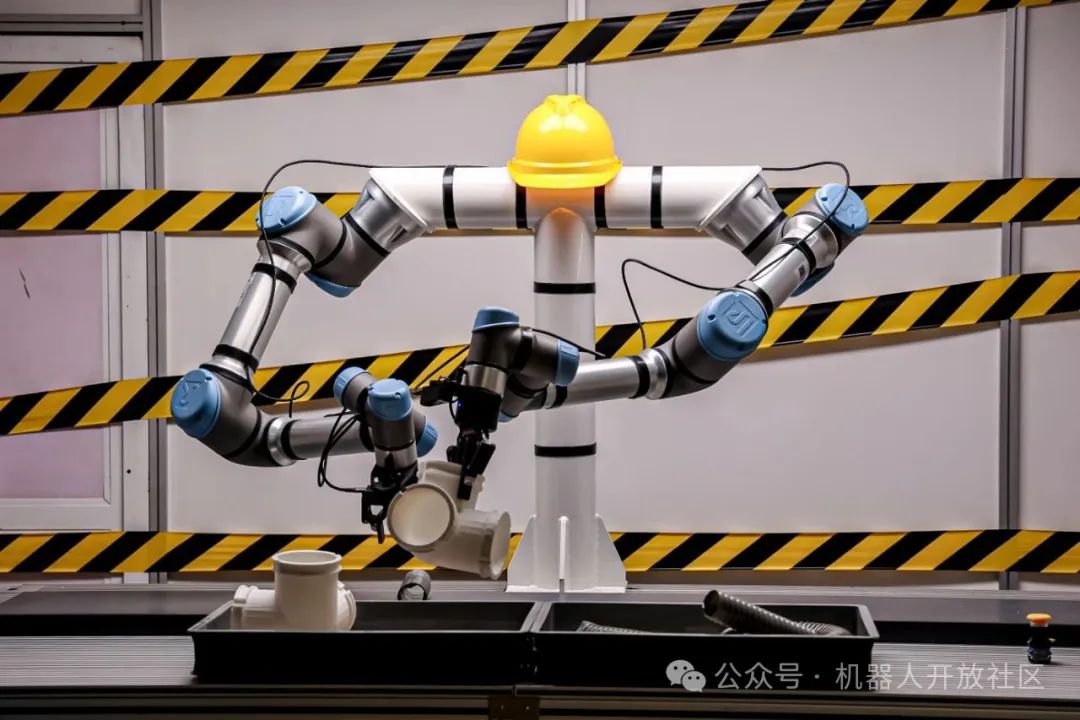
发布会现场,创新中心首席技术官唐剑演示了“慧思开物”在工业分拣、积木搭建、桌面清理和物流打包四个场景的真机操作。通过语音交互、APP直连等多种方式,用户能够与机器人轻松交互,场景任务丰富且执行精度高,机器人动作丝滑流畅。这是全球首次多场景、多任务、多构型具身智能机器人操作的直播展示,充分体现了“慧思开物”平台的通用性与智能化水平。
在工业分拣任务中,通过“慧思开物”APP直连,UR-5e机械臂能够精准解析语音指令,并通过双臂协同的方式完成分拣操作,展现了“慧思开物”在人机自然交互协作与机器人系统高效对接方面的技术优势。行业内首创的“APP+机器人”模式,将复杂的技术能力(如推理、规划、技能调用)封装为简单易用的操作流程,显著降低了用户使用门槛。同时,平台支持自定义模型和技能的快速添加,能够灵活适配不同场景的应用需求,为工业自动化领域提供便捷、高效、智能的解决方案。

值得注意的是,“慧思开物”依托创新中心构建的具身智能数据全链路解决方案,以及行业首个标准化通用具身智能数据集和Benchmark RoboMIND,实现了对多模态数据的高效利用与精准学习。RoboMIND覆盖工业、家庭、办公等多场景任务,具备高度的通用性和可扩展性,作为业内首个经由多类视觉语言动作(VLA)及端到端模型充分验证的跨本体标准化大规模数据集,为“慧思开物”提供了从任务理解到执行的全流程数据支持。
(文:机器人开放社区)