
还记得这个脖子以下全是腿的机器人吗?它可是机器人界的“轻功高手”!最初从非洲婴猴身上汲取灵感,能飞檐走壁、指哪跳哪。

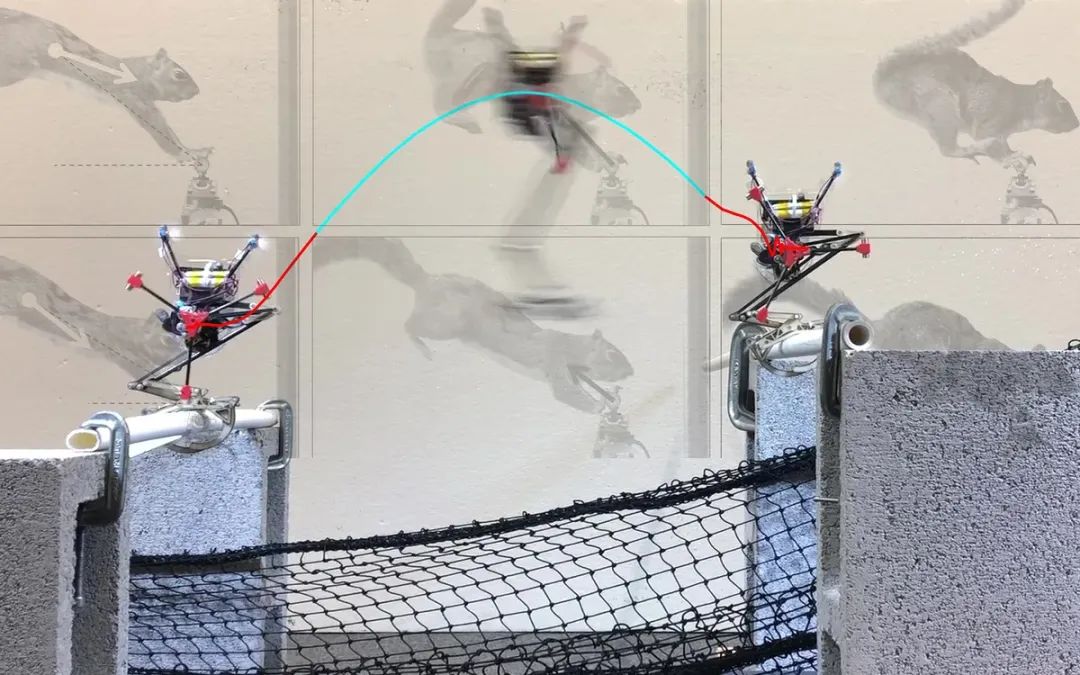
如今这个单腿机器人又拜松鼠为师,掌握了“松鼠式”跳跃和窄杆精准着陆的高难度杂技!
近日,来自UC伯克利、伊利诺伊、MIT的研究人员联手在《Science
Robotics》发表的黑科技研究中,单腿机器人Salto-1P成功实现了松鼠级跑酷。这不仅是机器人领域的一项重要突破,更揭开了自然界运动奥秘的神秘面纱,为救灾机器人、深空探测器等特种装备研发开辟了新路径。
▍松鼠的跑酷秘诀:不只是抓得牢
你一定见过松鼠在树枝间飞跃的样子,它们能够以每秒5米的弹跳速度跨越数倍体长的间隙,在直径不足2厘米的枝条上精准着陆,甚至能在失足瞬间通过“空中杂技”调整姿态逃生。这是怎么做到的?
研究人员发现了一个出人意料的秘密:松鼠主要靠的不是抓握力,而是巧妙控制身体与树枝之间的距离!
传统的机器人平衡控制主要依靠两种方法:调整足部位置和利用足部力矩。但在细树枝上,这两种方法都不太管用:树枝太细,产生不了大力矩;空间太小,没法随意调整脚的位置。
研究团队发现了关键所在——“径向力”!简单说,就是沿着从足部到身体重心方向的推拉力。这种力量有两大优势:不受支撑面大小限制,而且跳跃动物本来就需要强大的腿部力量,这样就能“一力多用”。
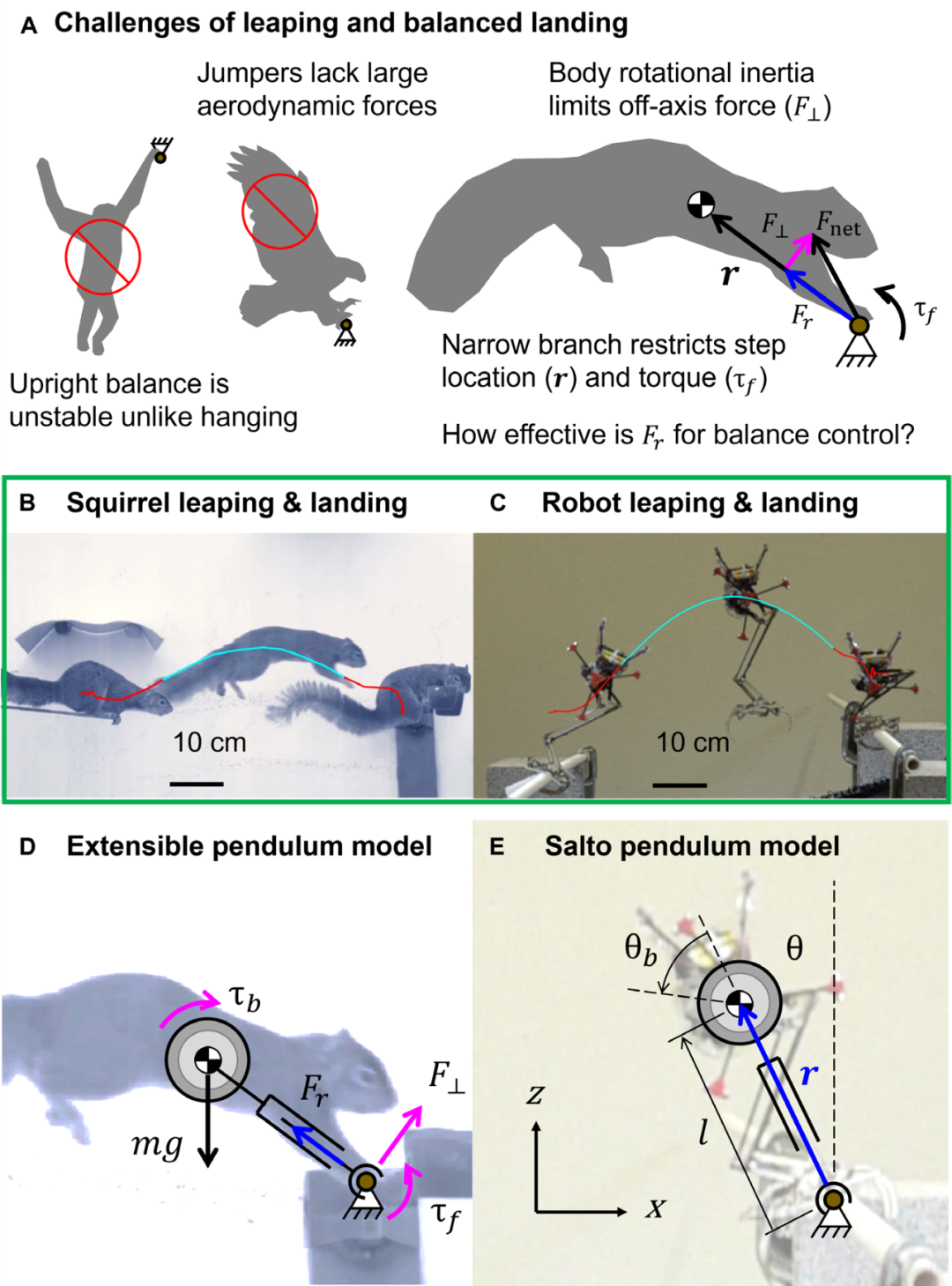
实验结果惊人:结合径向力控制和传统力矩控制,可平衡着陆的条件范围扩大了230%至470%!这意味着,即使着陆姿势和速度不那么理想,也能成功平衡,大大提高了适应复杂环境的能力。
研究团队搭建了松鼠版”极限跑酷场”,配备高速摄像机、力传感器和3D追踪系统,全方位记录松鼠的跳跃表演。他们发现,松鼠跳跃还有四大秘诀:
-
精准测距:先评估目标枝条的距离和稳定性,目标远时,它会降低腿部角度增强弹跳。枝条不稳时,降速跳跃并频繁调姿。
-
力量调控:远枝加大起跳力,细枝减小跳跃幅度。枝条细时,前腿先着陆最大化稳定性。
-
空中微操:不是直线飞行,而是实时扭动身体调整角度。前腿吸收86%冲击力,通过肩部巧妙传力;落地姿势不对?瞬间通过脚掌抓地和身体扭转完成自救。
-
精准着陆:前腿吸震、脚掌调姿,稳如泰山。高速着陆增强制动,低速着陆减少制动防翻倒。
▍Salto-1P的进化:单腿机器人的”松鼠三件套“
看到这里,你可能会想:这种平衡技巧真的实用吗?研究团队用实际行动给出了答案。
他们选择了单腿机器人Salto-1P作为实验平台。为了让Salto机器人更好地模仿松鼠的卓越运动能力,研究团队实施了三项关键技术改进:
首先,研究人员为Salto装配了电动飞轮系统(反作用轮)。这个装置的工作原理类似于人类通过摆动手臂来维持平衡的方式,能够在机器人空中飞行时旋转,帮助Salto实时调整身体姿势,从而更加精确地控制它的着陆角度。
其次,科学家们开发了一套创新的腿部刹车机制。这一设计灵感来自松鼠用前腿缓冲落地冲击的自然策略。当Salto接触地面的瞬间,该系统会立即激活,有效降低冲击力,同时提升机器人在窄小平台上站稳的能力。
最后,考虑到Salto缺乏松鼠那样用脚掌抓握树枝的天然优势,研究团队专门设计了特殊的低摩擦抓手装置,也能够测试径向力平衡控制的效果。这一巧妙设计确保了Salto在落地过程中不会因为产生额外的扭矩而失去平衡。
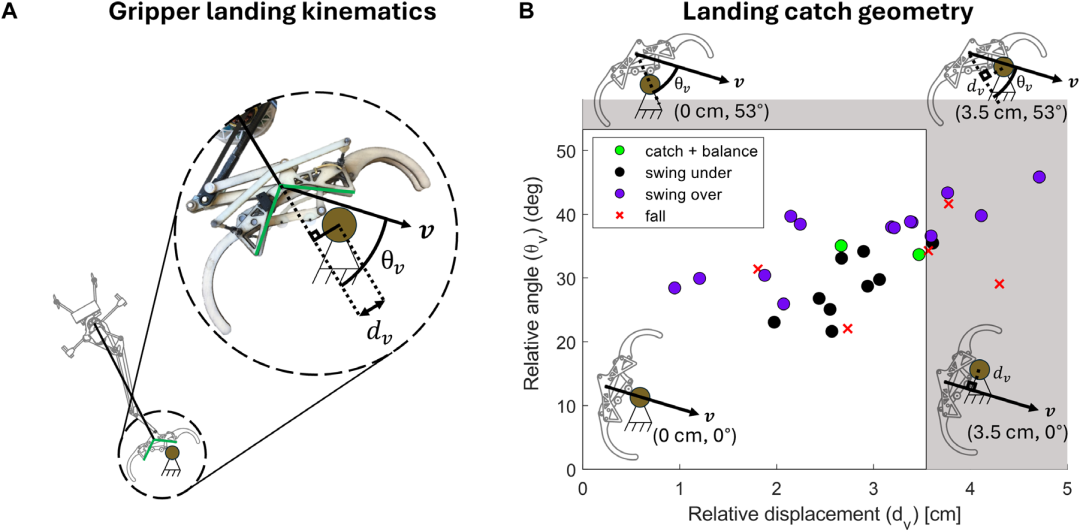
同时,这个抓手不靠电力驱动,而是利用巧妙的机械结构,能在接触树枝时自动形成一个“笼子”将树枝锁住。
![]()
在30次实验中,Salto-1P成功抓住树枝25次!更令人惊讶的是,有两次它还实现了完美的直立平衡着陆,就像松鼠一样站在树枝上!
▍从松鼠到机器人:自然启发的未来
这项研究不仅是技术上的突破,更展示了向自然学习的强大力量。通过对比松鼠和机器人的表现,研究团队总结出四个平衡着陆的关键因素:
强大精准的跳跃能力:必须能够跨越大间隔并精确命中小目标。
更水平的跳跃轨迹:研究发现,水平角度的着陆比垂直落下更容易平衡,这与大多数人的直觉相反!
控制重心与支撑点的距离:松鼠能将身体缠绕在树枝周围,使重心更靠近支撑点;而Salto则受到10厘米最小距离的限制。
径向力与力矩的组合控制:两种控制方式结合使用,效果远超单独使用任何一种。
研究还揭示了一个有趣的跳跃-着陆权衡关系:为了跳得更远,机器人通常会使用串联弹性元件(类似弹簧)来储存和释放能量,但这会降低控制响应速度,影响着陆平衡。这就像运动员面临的困境:全力冲刺会影响最后的精准控制。

想象未来的应用场景:搜救机器人能在地震废墟中敏捷跳跃;环境监测机器人可以像松鼠一样在森林中穿梭; 太空探索机器人一次跳跃就可以跨越很远距离;家用机器人也能轻松应对台阶、家具等障碍物……
这项研究还有一个更深层的启示:我们对自然界中看似简单的动作,可能理解得并不全面。松鼠的跳跃看起来很普通,但背后蕴含的控制策略却出人意料地精妙。大自然是最伟大的发明家,而科学则是破译这些发明的钥匙。

下次当你看到松鼠在树枝间轻盈跳跃时,不妨多看几眼——它们在表演的,可是最前沿的动力学和控制理论~
最后,你最想看到这种松鼠启发的机器人应用在什么场景?欢迎在评论区分享你的奇思妙想!
论文链接:
https://www.science.org/doi/10.1126/scirobotics.adq1949
(文:机器人大讲堂)