
2025年3月21日,国家地方共建人形机器人创新中心(以下简称“国地中心”)联合上海大学和清华大学,共同发布了具身智能仿真平台——“格物”。
该平台集成了先进的强化学习框架与多模态运动控制技术,致力于为科研机构、高校及企业提供一站式的机器人开发与测试解决方案,推动人形机器人技术从实验室走向产业化。国地中心首席科学家江磊主持会议,上海市经信委人工智能发展处有关同志出席会议并致辞。
近年来,随着技术的不断突破和应用场景的拓展,具身智能的战略地位日益凸显。2025年政府工作报告中,具身智能首次被写入,与生物制造、量子科技、6G等一同被列为未来产业培育的重点方向。可以预见的是具身智能板块正式进入国家顶层设计,其战略意义将视为推动新质生产力发展的关键引擎。
▍仿真平台是推动人形机器人技术迭代的一把关键钥匙
国地中心首席科学家江磊重点对“格物”具身智能仿真平台的重要性进行解读,他强“格物”具身智能仿真平台是连接数字世界和物理世界的关键工具,特别是在推动人形机器人技术的进步方面。通过仿真平台,开发者能够更高效地进行机器人开发和训练,降低研发成本,从而加速人形机器人从实验室到实际应用的转化。

国地中心首席科学家江磊
江磊提到,当前的技术环境下,机器人技术的进步需要一个性能强大的仿真平台作为支撑,特别是是具身智能,正在成为推动技术创新的关键因素。在政策和技术的双重推动下,上海作为人工智能的前沿城市,正在为机器人技术的应用提供更多支持。
江磊表示,未来的机器人不仅需要具备强大的学习能力,还需能够快速适应不同的场景和任务。通过此次“格物”具身智能仿真平台的发布与开源,江磊希望能够吸引全球的开发者参与进来,共同推动人形机器人领域的发展。
▍邢伯阳分享具身智能与人形机器人开发新路径
国地中心研发总监邢伯阳在会上深入探讨了具身智能与人形机器人开发的新范式,邢伯阳回顾了具身智能的发展历程,并指出技术的核心不仅仅是理论上的构想,而是通过动态控制与强化学习等方法在现实世界,不断提升机器人自我学习和环境交互的能力。

国地中心研发总监 邢伯阳
邢伯阳以OpenLoong为例,分析了其核心控制系统的构建,并指出该系统的关键在于通过高效的仿真平台与深度学习技术的结合,使机器人能够快速适应环境变化并执行复杂任务。当前,他强调,从传统的基于优化问题的控制方法,到如今借助并行计算和具身智能的技术手段,机器人在学习和任务执行上的效率和精度得到显著提升。
邢伯阳指出,通过大规模预训练模型与强化学习相结合,机器人不仅在理论学习上取得突破,更能在实际环境中迅速适应并完成各类任务。
邢伯阳强调,仿真平台作为该技术发展的核心支撑,能够在虚拟环境中进行高效训练,从而极大缩短了开发周期,降低了开发成本,并为技术迭代提供了有力保障。他进一步提出,未来的机器人开发趋势将从以模型为驱动向多模态学习转型,以实现更加高效的智能控制体系。
▍叶林奇教授无偿贡献“格物”平台给OpenLoong开源社区
作为“格物”具身智能仿真平台的特殊贡献者,上海大学叶林奇副教授,将“格物”具身智能仿真平台无偿贡献给OpenLoong开源社区。会上国地中心正式授予叶林奇教授“OpenLoong开源社区荣誉贡献者”的称号!

叶林奇教授“格物”具身智能仿真平台的核心开发者,师从机器人领域泰斗Andy Ruina教授,与清华大学合作组建“清华-上大”机器艺术与具身智能实验室,培养具身智能领域高端人才。实验室聚焦机器人、具身智能及与艺术结合的前沿研究,已成功研制可重构四足、链传动/绳驱双足、视触觉感知抓取、模块化可重构、履带双臂排爆等多款机器人。
▍“格物”具身智能仿真平台全球发布
叶林奇教授表示,作为一款面向未来机器人研发的高性能仿真训练平台,“格物”具身智能仿真平台通用强化学习框架与模型自动化适配技术,一套代码覆盖百余款机器人,新机器人导入即训练,无需重新编程。

上海大学叶林奇副教授
“格物”具身智能仿真平台基于Unity RL Playground强化学习框架打造,支持从仿真训练到真实硬件部署的全流程自动化。其核心功能包括:
■ 一键式训练
用户仅需导入机器人模型(URDF文件),平台即可自动优化奖励函数并生成运动策略,将传统耗时数周的开发周期缩短至分钟级。
■ 多模态运动学习
支持双足、四足、轮式等多样化机器人形态,可自主切换行走、奔跑、跳跃等复杂动作,适应家庭服务、工业巡检、灾害救援等多场景需求。
■ 极限性能测试
模拟极端地形、高速运动及重载环境,助力机器人设计优化与形态进化,显著提升硬件方案的可靠性与适应性。
■ Sim2Real无缝迁移
通过高精度状态对齐工具与在线学习模块,确保仿真策略可快速部署至真实机器人,解决“虚拟与现实鸿沟”难题。
平台创新性地引入前馈引导的强化学习技术与自适应课程学习算法,极大提升策略学习效率。“格物”具身智能仿真平台的发布标志着我国在人形机器人仿真领域迈出关键一步。其通用性与易用性将大幅降低研发门槛,加速创新成果落地。
目前,“格物”具身智能仿真平台已应用于多款机器人原型开发,在近期测试过程当中,国产高仿迪士尼开源双足机器人Tinker展示了稳健的行走与抗扰能力,宇树四足机器人Go 2通过“格物”具身智能仿真平台实现了敏捷跳跃与动态平衡控制能力。
此外,“格物”具身智能仿真平台支持机器人结构优化与微调,通过调整腿长、关节偏转等参数探索机器人的性能极限,为产品设计提供数据支撑。
▍单个项目最高50万奖励 开放基金主投四大领域17个细分方向
为推动人形机器人与具身智能领域的创新发展,国地中心设立开放基金,围绕平台技术、具身智能、数据集、训练场四大领域及细分17个资助方向,用于资助国内高校、科研机构和企业的优秀青年学者。
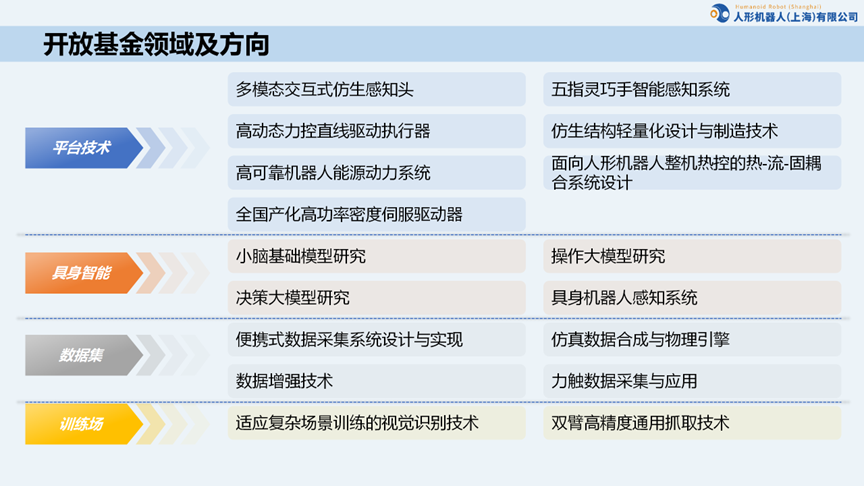
开放基金面向四大领域17个细分方向
每个资助项目金额为30-50万元,研究周期为一年。基金优先资助具有博士学位或高级职称的研究人员,申请书提交的截止日期为2025年4月30日,2025年6月15日进入立项评审阶段,基金发布方组织项目申请书评审,择优确定资助对象。2025年7月30日完成立项批复,国地中心与资助对象所在单位签订合同。
项目申报邮箱:
gaoyingfei@openloong.net
点击下方查看附件详情
附件一_国家地方共建人形机器人创新中心开放基金方向文件.docx
附件二_国家地方共建人形机器人创新中心开放基金项目申请书_领域X-方向X-课题名称-申请人姓名-申请单位.docx
▍大咖深度分享 探讨具身智能产业未来趋势
本次大会,长江证券机械行业联席首席分析师倪蕤围绕人形机器人和具身智能产业的发展潜力进行探讨,倪蕤指出,当前人形机器人技术的发展与十多年前中国新能源产业初期的情形相似,处于一个快速增长的阶段。
类似于2009至2010年新能源车行业在政策推动下迎来的转折,人形机器人产业也将迎来类似的突破,尤其是在技术突破和政策扶持的推动下。倪蕤以特斯拉的案例强调,新能源车行业的快速崛起得益于政策支持、技术优化和成本下降,这也将是人形机器人产业发展的未来趋势。

长江证券机械行业联席首席分析师倪蕤
倪蕤进一步分析认为,新能源车行业从政策扶持到市场接受的过程,为人形机器人产业提供了重要启示。随着政策和技术的推动,人形机器人将逐步实现产业化,并在多个领域如家居、服务和工业中找到应用场景。倪蕤认为,未来的人形机器人产业将经历从技术积累到广泛应用的跨越,并随着技术的不断成熟和市场需求的扩大,成为全球重要的产业之一。
此外,复旦大学信息学院陈涛教授分享了复旦大学信息学院和机器人研究院联合开展的“具身感知和声音大模型”研究。陈涛诠释了“具身智能”这一概念,强调其核心在于通过以人为中心的设计理念,结合具身感知、运动学以及人工智能模型,推动智能机器人向更高效的协作和任务执行能力迈进。

复旦大学信息学院陈涛教授
陈涛详细解读了如何通过运动大模型实现人形机器人与环境的交互,以及在这一过程中如何利用模拟学习(MTC Learning)和群体智能架构来提升机器人执行任务的灵活性和适应性。
在技术方面,陈涛展示了复旦团队在数据采集和仿真技术上的创新应用,特别是在运动生成和多模态学习的结合上。他强调,通过高效的仿真平台,机器人能够在虚拟环境中进行训练,并有效增强其在实际环境中的表现。仿真平台的作用不仅是数据的收集和分析,还能通过便捷的接口支持模型的快速部署和优化。
陈涛提到,复旦团队正在探索如何通过数据集和低成本的设备,优化机器人在复杂环境中的运动与感知能力,进一步推动产业化的进程。
(文:机器人大讲堂)