

攀爬机器人因其在垂直表面、天花板或管道等环境中移动的能力而受到广泛关注,然而,研发出能够应对复杂表面,特别是非连续表面的攀爬机器人,一直是该领域的重大挑战。近期,浙江大学机械工程学院邹俊课题组在该领域取得重要突破,课题组从爬山虎的攀爬特性中汲取灵感,提出了生长-攀爬机制。基于此机制,课题组构建了一个爬山虎启发的柔性攀爬机器人,可以在复杂表面特别是非连续表面攀爬,验证了爬山虎生长-攀爬机制的有效性,为攀爬机器人开辟了新的思路。
攀爬植物启发攀爬机器人
国际知名学术期刊Science Advances以“Parthenocissus-inspired soft climbing robots”为题报道了来自流体动力基础件与机电系统全国重点实验室的最新研究成果,并入选封面论文,同时,Science主页以“Climbing plants inspire climbing robots”为题推荐本研究成果。论文全部作者均来自杨华勇院士团队,博士生秦可成和唐威研究员为论文第一作者,唐威研究员和邹俊教授为论文通讯作者。

攀爬机器人因具备在垂直表面、天花板和管道等特殊环境中逆重力移动的能力而备受瞩目。然而,面对航空维护、工业制造、核电站维护和建筑清洁等实际应用,攀爬机器人需要具备攀爬复杂表面,甚至非连续表面的能力。复杂表面是指既有复杂结构(如曲面、间隙、粗糙度等)又有复杂材料(如水泥、金属、木材等)的表面。粘附机制和运动机制是攀爬机器人的关键所在,不同粘附与运动机制的组合构成了现有攀爬机器人的设计基础。然而,这些设计存在一定的局限性,通常只能适应特定材料或结构的表面,因此,开发能够适应复杂表面(包括复杂结构和复杂材料)尤其是非连续表面的攀爬机器人,是当前面临的一项重要挑战。
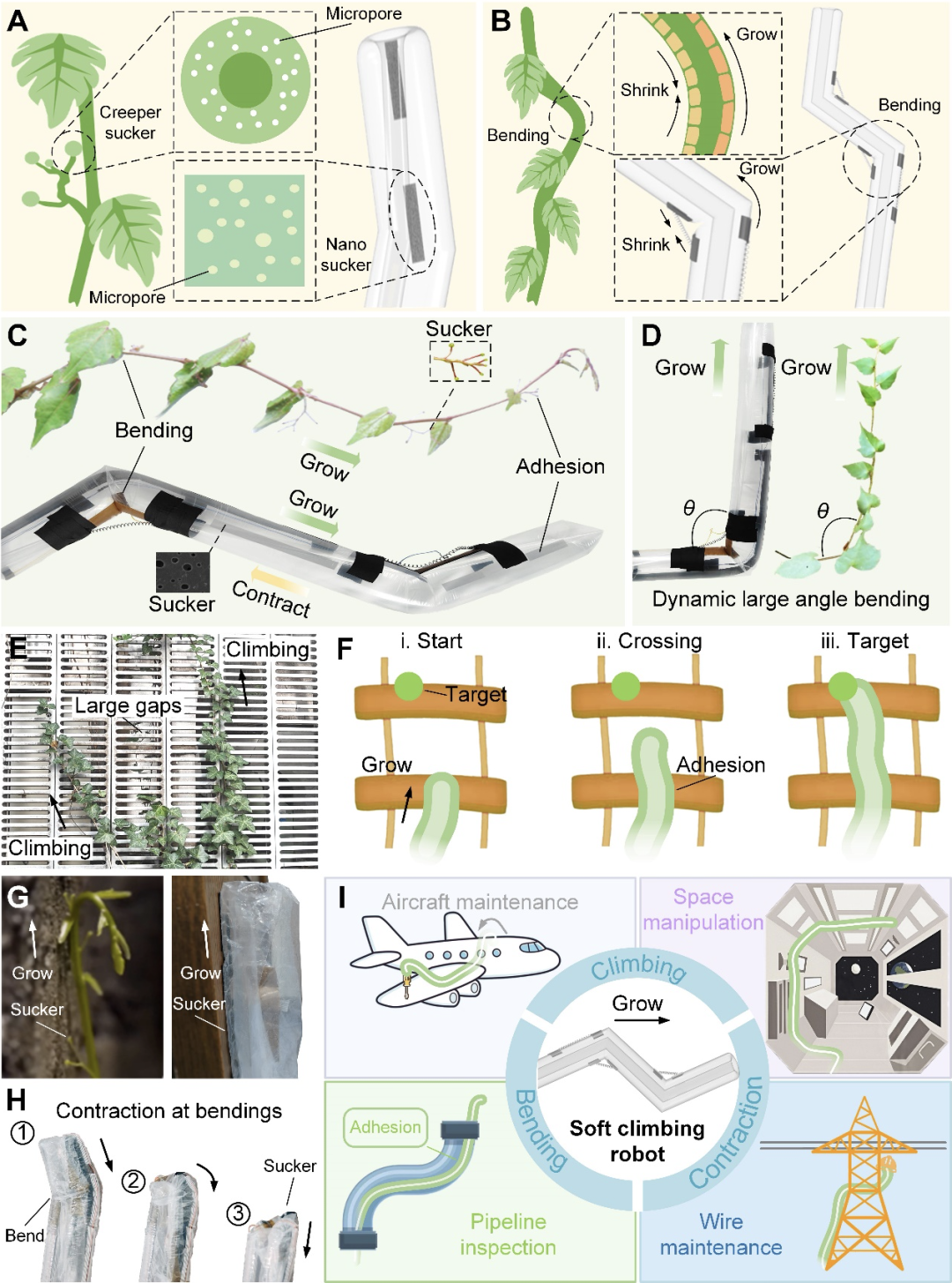
图1 受爬山虎启发的柔性攀爬机器人
▍受爬山虎启发的柔性攀爬机器人
在自然环境中,爬山虎展现出独特的生长与攀爬行为。它能够灵活地在复杂表面上攀爬,穿梭于狭窄间隙,并通过生长跨越较大间隙。爬山虎吸盘上的微结构增强了其吸附力,使其能够牢固地附着在墙面上。在生长过程中,爬山虎先长出吸盘并固定在墙上,然后向上生长躯干,已生长的部分牢固附着在墙上,互不影响。此外,有研究表明爬山虎可能通过凝胶状纤维的收缩完成类似铰链的弯曲,确保弯曲区域位置稳定。那么,爬山虎的生长、攀爬和弯曲方式是否能应用到攀爬机器人上?基于这种方法设计的攀爬机器人能否进一步验证爬山虎生长、攀爬和弯曲方式的有效性?
在软体机器人领域,像植物一样生长的生长机器人备受关注。但现有的生长机器人存在诸多问题:一是自由生长无攀援能力;二是连续性使其转弯困难,难以适应非结构环境;三是弯曲策略虽多样,但无法同时实现快速响应、精确控制与轻量化;四是现有回收机制无法兼顾轻质与低复杂度。鉴于复杂表面攀爬需求,生长机器人应具备攀援能力、快速可控的弯曲能力及简易可靠的回收能力。因此,研发适用于复杂表面特别是非连续表面攀爬的生长机器人极具挑战性。
受爬山虎生长攀爬的启发,我们提出了生长-攀爬机制,通过生长增加粘附并促进攀爬,实现复杂表面特别是非连续表面的攀爬。基于此机制,我们构建了爬山虎启发的柔性攀爬机器人。爬山虎依赖吸盘攀爬,机器人借助微结构生物膜攀爬;爬山虎的吸盘是生长出来的,机器人的微结构生物膜通过材料外翻生长出来;爬山虎的弯曲依赖凝胶状纤维收缩,机器人的弯曲借助形状记忆合金(SMAs)弹簧收缩。比爬山虎更进一步的是,机器人完成任务后还能完全收回身体和微结构生物膜。生长-攀爬机制使机器人能在复杂结构(特别是非连续表面)和复杂材料的表面上攀爬,已生长部分牢牢抓住墙面,避免弯曲时的漂移问题和回收时的屈曲问题。与现有的生长机器人弯曲和回收机制相比,SMA驱动的弯曲机制快速、可控、轻质,回收机制轻便易制造。我们提出的生长-攀爬机制解决了研发适应复杂表面特别是非连续表面的攀爬机器人的重要挑战,验证了爬山虎相关机制的有效性,为攀爬机器人领域开辟了新的可能性。
▍生长-攀爬机制
爬山虎的生长-攀爬机制包括驱动力、物质运输和粘附。其驱动力源于细胞膨压,促使细胞扩展和生长;营养物质通过体内运输至尖端合成细胞壁,支持生长;爬山虎的吸盘凭借微观结构吸附墙面,助力其在复杂表面攀爬。受此启发,构建的柔性攀爬机器人以气压为驱动力,利用生长材料外翻实现物质运输,其表面的微结构生物膜仿照爬山虎吸盘,通过范德华力和负压效应产生粘附力。

图2 柔性攀爬机器人的生长-攀爬机制
实验表明,微结构生物膜在光滑表面的吸附应力可达10 kPa,在粗糙表面可达7 kPa,适用于多种复杂表面的粘附。机器人在复杂材料和结构表面展现出良好的攀爬性能,能通过自身柔软性和粘附性紧密贴合管内壁并顺利通过弯角。

图3 柔性攀爬机器人在不同表面攀爬
视频1 柔性攀爬机器人在复杂表面攀爬
▍生长弯曲机制
爬山虎的生长弯曲过程从宏观上看是一种铰链式弯曲,弯曲位置固定;从微观上看,其弯曲机制涉及凝胶状纤维的收缩。受此启发,柔性攀爬机器人的生长弯曲遵循三个原则:铰链式弯曲、已生长弯曲部分被锁定不影响后续生长、单侧收缩。机器人通过SMA弹簧的相变产生褶皱,使生长材料重叠实现弯曲。
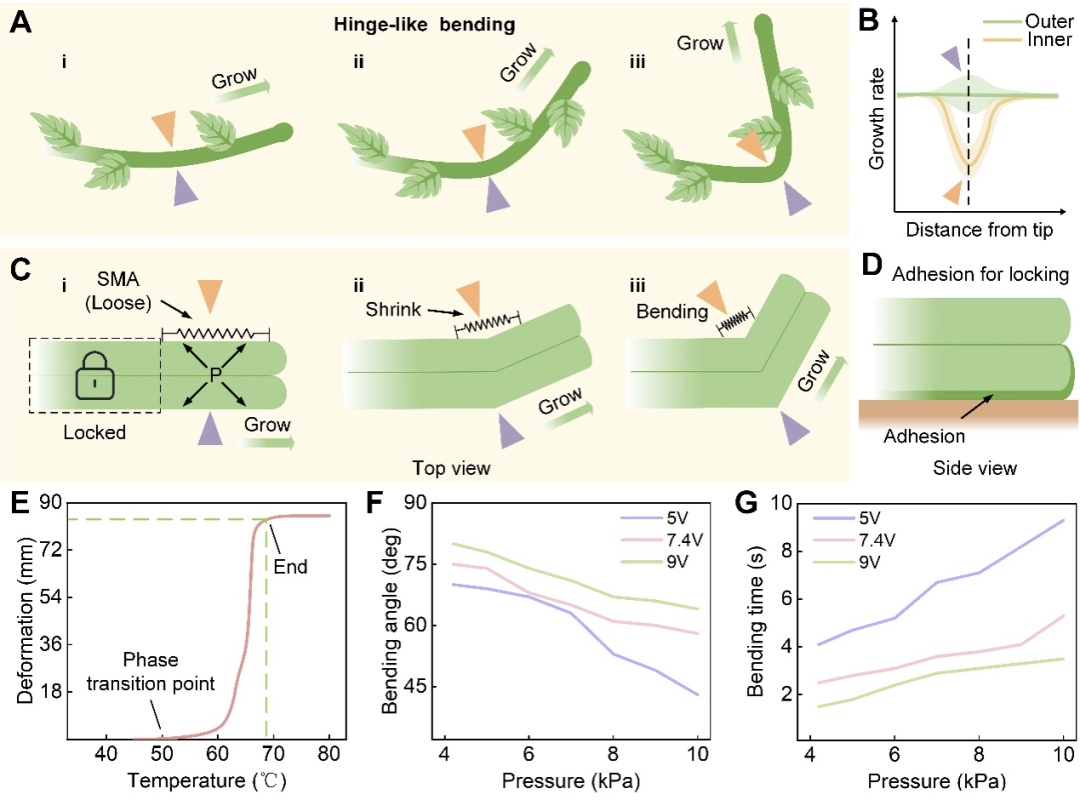
图4 柔性攀爬机器人的弯曲机制
实验测试了SMA弹簧在不同机器人内压和电压下的性能,在4.2 kPa 内压下可达80°弯曲角度。机器人在生长弯曲过程中,已生长部分的状态不受后续运动影响,还能完成复杂的3D生长和多次转弯以到达目标。
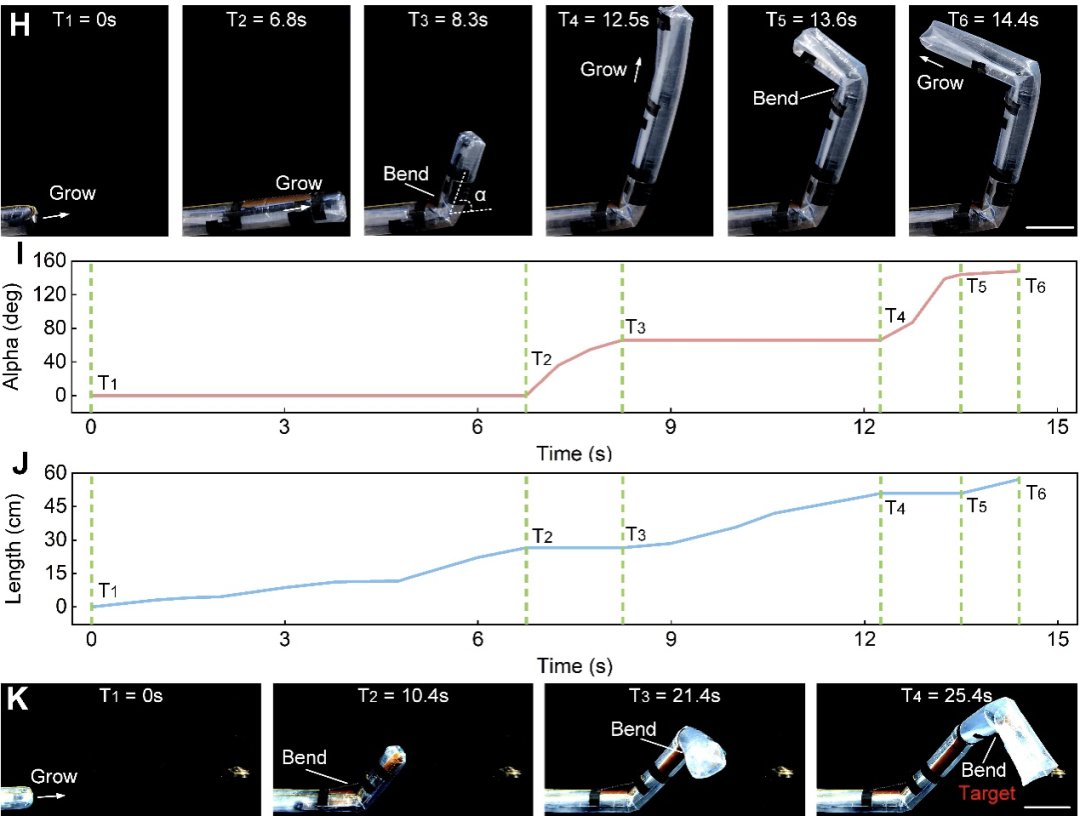
图5 柔性攀爬机器人的连续弯曲和3D弯曲测试
视频2 柔性攀爬机器人的3D弯曲
▍回收机制
生长机器人的回收是长期的难题,其根本原因是径向承载能力不足。而柔性攀爬机器人由于微结构生物膜的粘附作用,与墙面间存在粘附力,抵消了径向力的影响,解决了回收难题。考虑到柔性攀爬机器人与墙面的相互作用,可将收缩视为类似于生物粘附系统的剥离行为,剥离角越大,剥离力越小。柔性攀爬机器人的剥离角可近似为180°。
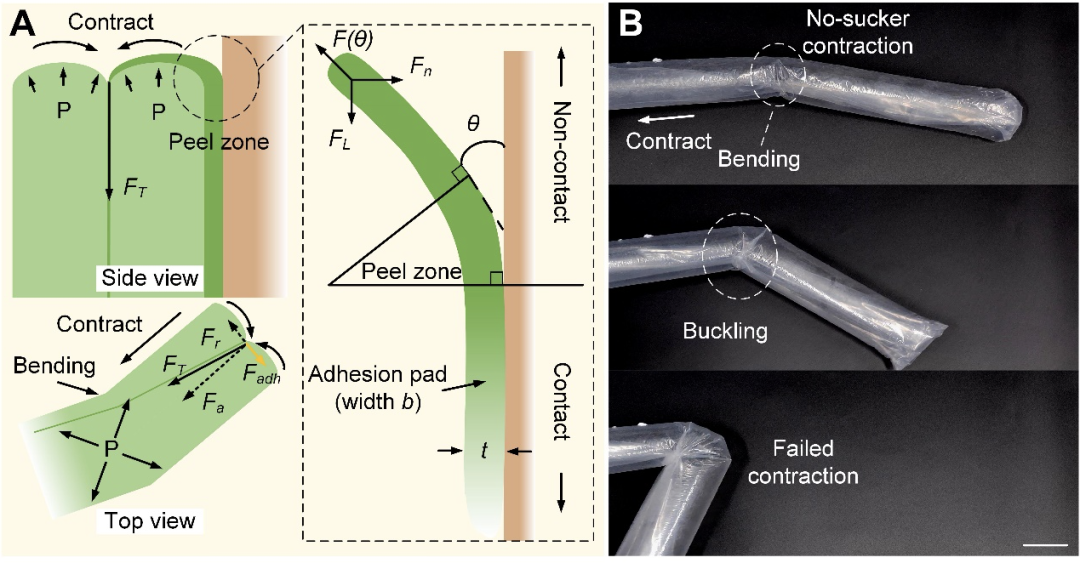
图6 柔性攀爬机器人的回收机制
实验展示了柔性攀爬机器人在连续弯曲后和在管道内的回收测试。
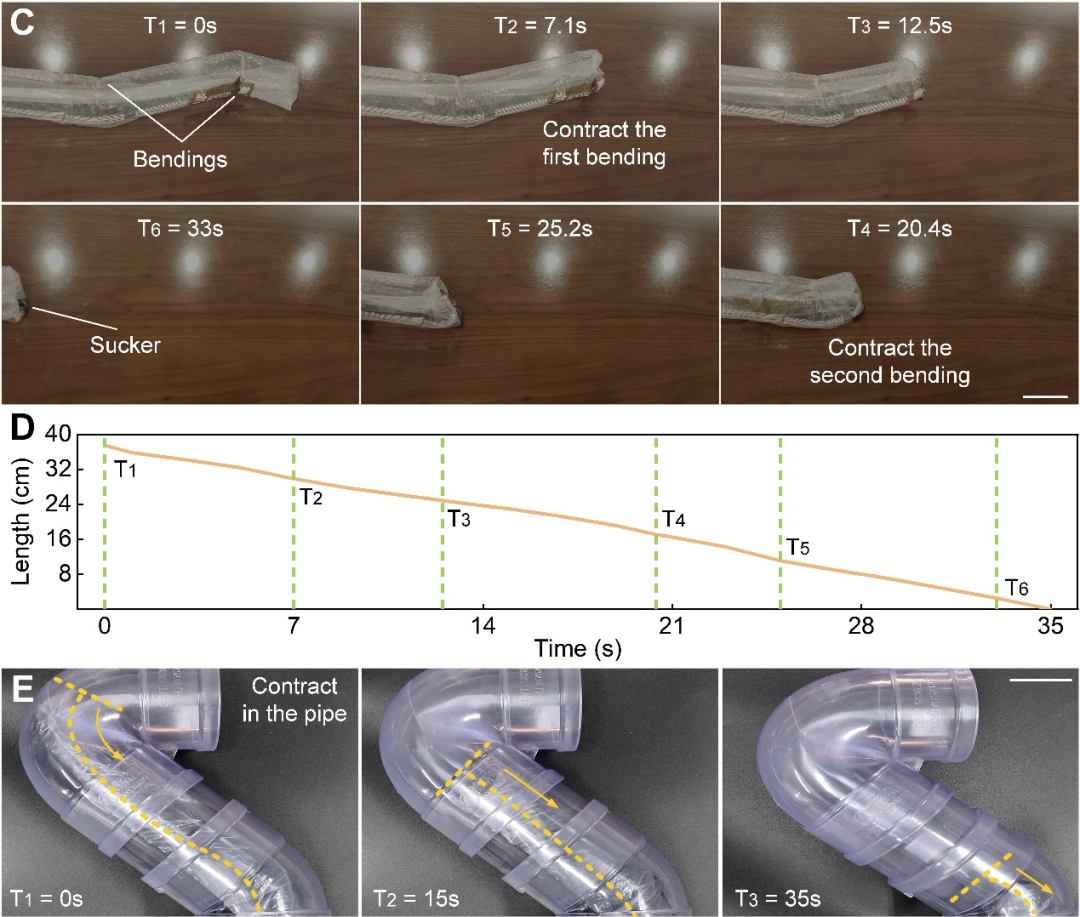
图7 柔性攀爬机器人的回收测试
视频3 柔性攀爬机器人的回收
▍柔性攀爬机器人的应用展示
我们展示了机器人在实际应用中的潜力。柔性攀爬机器人通过图像处理技术实现实时路况分析与路径规划,利用头部摄像头获取图像信息,经神经网络模型处理后转化为控制指令,使机器人能灵活应对环境障碍。
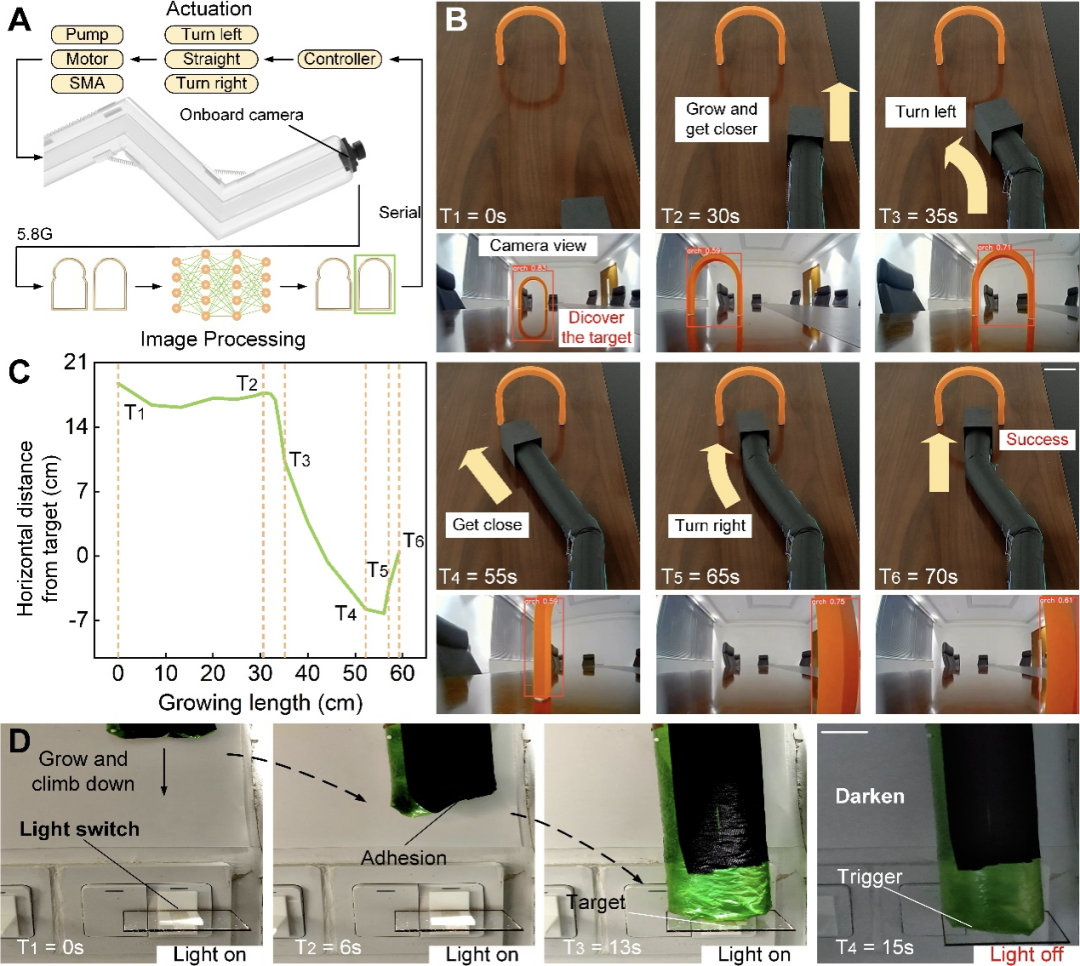
图8 用于视觉探测的柔性攀爬机器人
柔性攀爬机器人还可以与其他类型机器人协同工作,如与无人机结合,用于建筑工地等场景的三维作业,提高作业效率和安全性。无人机与柔性攀爬机器人的组合优势互补。无人机可大范围移动,但是需要远离危险的壁面;柔性攀爬机器人则具备和壁面交互的能力,具有攀爬适应性,专注于小范围探测任务。
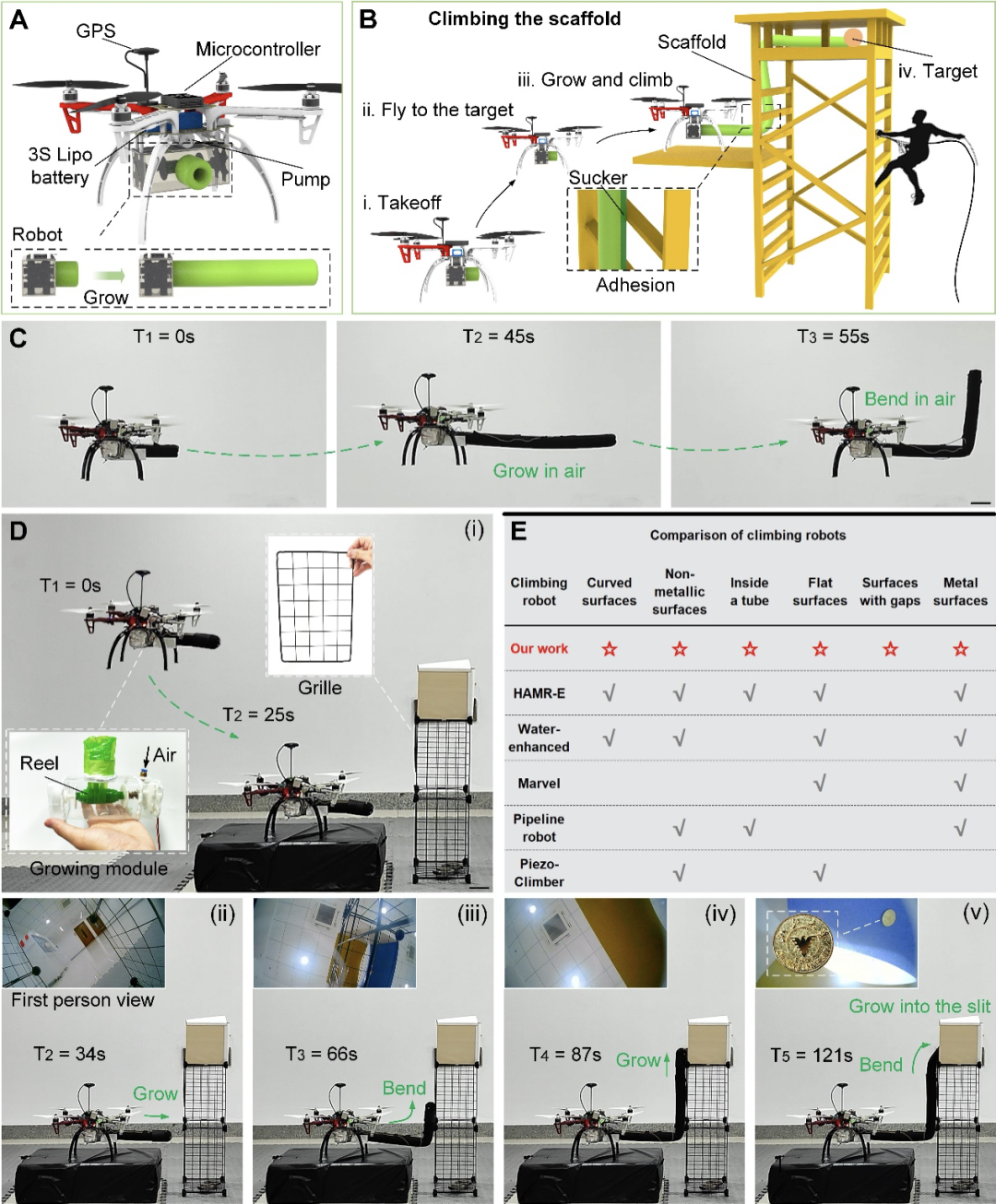
图9 柔性攀爬机器人与无人机组合用于建筑工地检查
视频4 柔性攀爬机器人与无人机结合
▍总结
1.从爬山虎的生长和攀爬行为中总结出了一种生长-攀爬机制,即生长以攀爬,攀爬以生长;
2.设计了一种仿爬山虎的柔性攀爬机器人,能够在多种复杂表面特别是非连续表面攀爬,验证了爬山虎生长-攀爬机制的有效性及其对复杂表面的适应性;
3.提出通过材料外翻生长出微结构生物膜以增强粘附力,类似于爬山虎长出吸盘,提升了攀爬、弯曲和回收性能;
4.提出使用形状记忆合金(SMAs)收缩来实现弯曲,类似于爬山虎通过凝胶状纤维的收缩实现类似铰链的弯曲,实现了轻质、快速和可控的弯曲。
点击“阅读原文”直接跳转原文链接:
https://www.science.org/doi/10.1126/sciadv.adt9284
来源:邹俊研究小站
(文:机器人大讲堂)