
清华大学是国内最早进行人形机器人探索的高校,被业界称为中国人形机器人关键技术的发源地,早在1988,清华大学智能技术与系统国家重点实验室,就开始研制THMR(Tsinghua Mobile Robot)系列机器人系统。
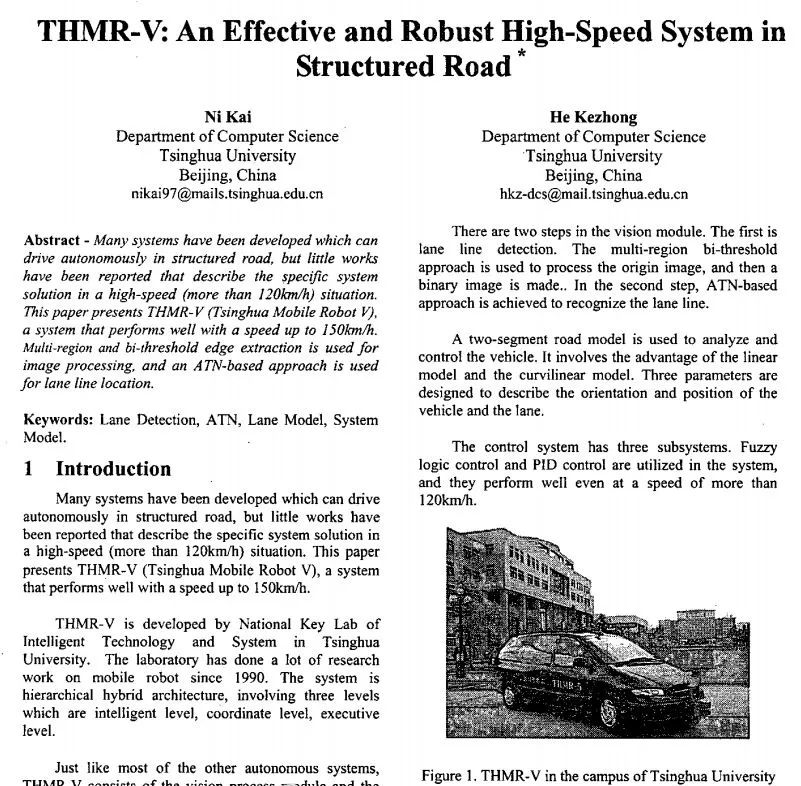
但该研究面向无人驾驶汽车系统开发,并没有表现出“类人”的模样,不过关键技术的研究反而奠定移动机器人技术基础。1998年,清华大学利用”985工程”第一批专项经费,设立了一个机器人研究重大项目。类人机器人项目这才启动。

2002年,清华大学研制出具有32个自由度仿人机器人THBIP-I,该机器人由清华大学精密仪器系、机械工程系和自动化系于2002年联合研制完成,是我国首个具备完整仿人结构的自主机器人系统。THBIP-I身高172cm,重130kg,全身配置32个自由度,头部、手臂、躯干和腿部均采用模块化设计,实现了类人运动的基础架构。

赵明国,清华大学自动化系研究员、机器人控制实验室主任、清华大学无人系统中心类脑机器人中心主任。
2015年清华大学与优必选共建北京研究所,聚焦算法预研,培养出赵明国等领军人才,成为后续创业者的“黄埔军校”。
当前清华系机器人与具身智能研究机构集中在交叉信息研究院,如星动纪元陈建宇、千寻智能高阳都是国内头部具身智能人形机器人赛道头部技术专家。

孙富春 清华大学计算机科学与技术系教授,智能技术与系统国家重点实验室(清华大学)副主任
此外,清华大学人工智能研究院智能机器人中心也是人形机器人研究的前沿阵地,技术代表为孙富春团队研发的灵巧手以触觉、视觉等多模态传感技术为基础,采用深度学习算法,为机器人的多模态融合感知赋能,目前已在国内30多家企业和机构落地使用。
作为具身智能与人形机器人的“黄埔军校”,清华大学孕育了众多优秀的机器人研究团队和公司,下面这7家清华系机器人公司就是其中的杰出代表,值得我们重点关注。
▍星动纪元:唯一有清华大学占股的人形机器人企业
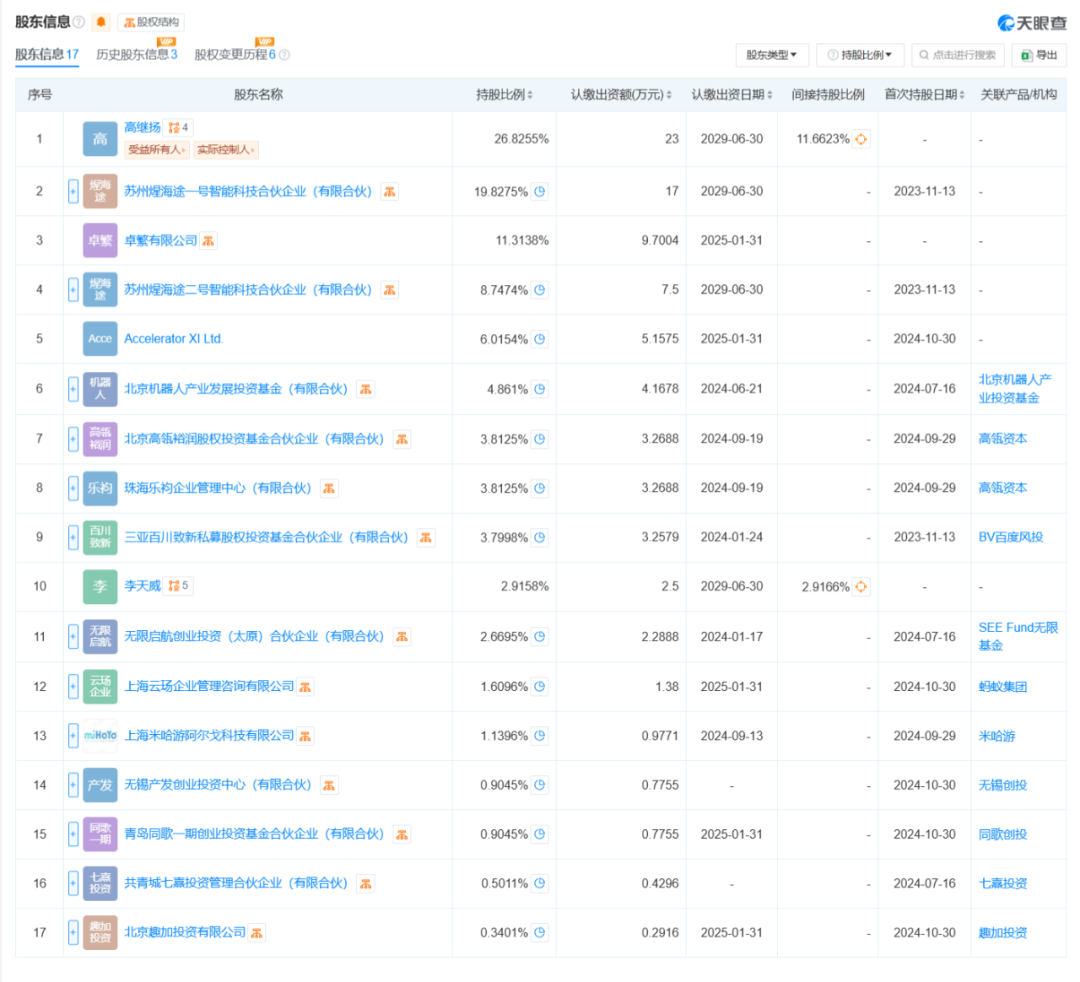
北京星动纪元科技有限公司成立于2023年8月,由清华大学交叉信息研究院孵化,也是唯一一家清华大学占股的人形机器人企业。在2024年10月Pre-A轮融资前,清华通过华控技术转移有限公司持股比例为7.8%。

2025年1月,公司完成新一轮增资(新增股东包括阿里巴巴等),注册资本从约874.8万元增至1095.9万元。此轮工商变更后,清华持股比例被稀释至6%,但仍保持重要股东地位。

星动纪元创始人陈建宇
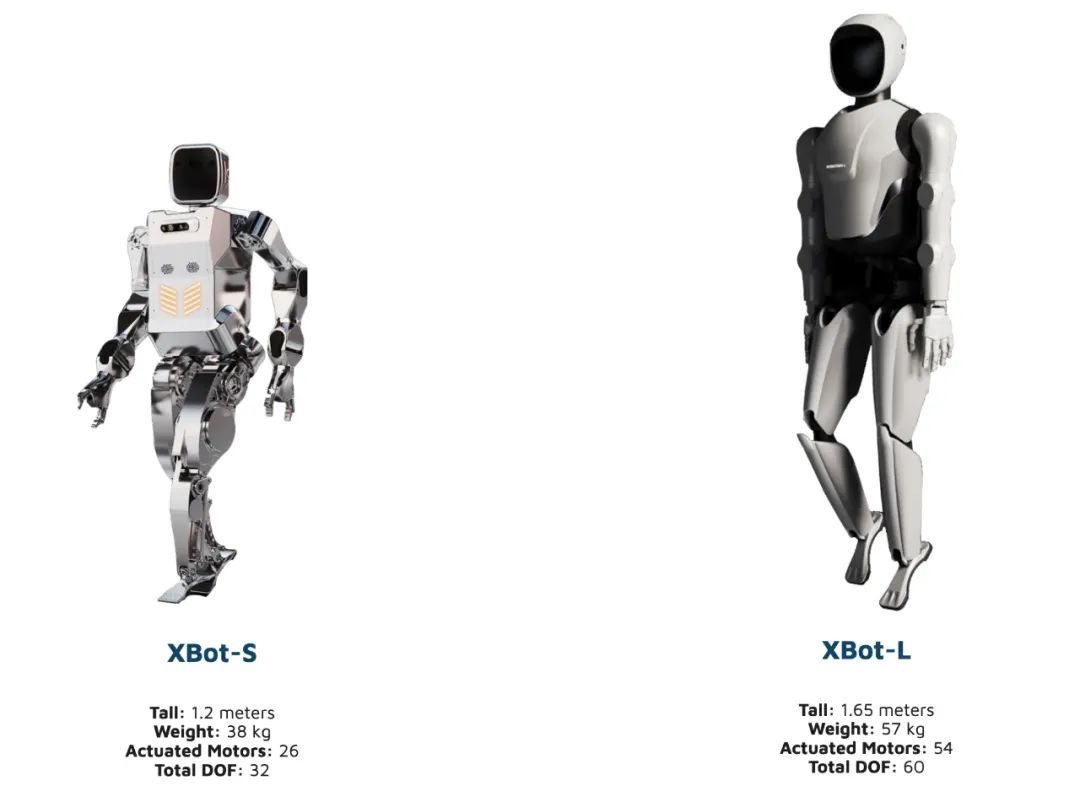
2024年5月,小星XBot-L成为全球首个登上长城的人形机器人。这款全尺寸机器人(身高1.65米,体重57公斤)搭载灵巧手,能在复杂地形中稳定行走、上下楼梯、举重跳跃,并采用感知强化学习算法实现非预编程的自主移动。同年6月,公司开源人形机器人强化学习训练框架Humanoid-Gym,结合NVIDIA Isaac Gym优化了模拟到真实环境的迁移效率。
2024年8月星动纪元推出第六代人形机器人星动STAR1,自由度提升至55个,关节扭矩达400N·m,最大奔跑速度超6m/s,负载能力160kg。其硬件核心部件(如灵巧手、减速器、电机)实现完全自研,并整合端到端语言-视觉-动作大模型,支持多场景应用。该机型在2024年世界机器人大会上展示双足式、轮式及桌面式版本,同年10月完成河西走廊复杂地形奔跑挑战,成为全球跑得最快的人形机器人。
2024年12月星动纪元发布仿人五指灵巧手XHAND1,采用全直驱方案(12个主动自由度),单手握力80N,可举起25kg哑铃,指尖触觉传感器精度达0.1N,支持拧瓶盖、抓取微小物体等精细操作。同期推出端到端原生机器人大模型ERA-42,首次实现同一模型驱动五指灵巧手完成超100种工具操作任务(如钻孔、倒水),并通过世界模型预测物理环境变化,2小时内可学习新技能。

星动纪元在成立后一年迅速完成三轮融资,总规模超过4亿元。2023年10月完成种子轮融资,金额数千万元,由世纪金源领投、图灵创投跟投,用于技术验证及团队建设;2024年1月完成天使轮融资,超亿元,由联想创投领投,金鼎资本、泽羽资本等跟投,老股东追投,推动首款人形机器人研发。

2024年10月星动纪元完成Pre-A轮融资,近3亿元,由清流资本、元璟资本、阿里巴巴联合领投,用于具身智能技术突破及商业化。2025年初,星动纪元被列为国内估值超10亿元的9大机器人初创企业之一,跻身具身智能领域的头部企业。
▍星海图:打造“一脑多形”通用智能体的行业领军者
星海图(北京)人工智能科技有限公司成立于2023年9月,是国内具身智能领域的头部企业,公司专注于“一脑多形”的具身智能机器人研发,通过全栈自研技术覆盖机器人本体设计、端到端算法及场景解决方案,已推出仿人形机器人R1系列(含Pro、Lite等型号)及机械臂A1等产品,支持科研开发与工业场景应用,定价19.9万元起。公司核心技术包括全球首个Real2Sim2Real空间智能引擎和基于3D扩散策略的具身基础模型EFM-1,可实现高效任务泛化与数据扩展。

左侧第二为星海图CEO高继扬
星海图的四位联合创始人中,有三位出身于清华大学。创始人兼CEO高继扬本科毕业于清华大学电子工程系,高中时期通过物理竞赛保送清华。他在校期间即展现出对人工智能的兴趣,后赴南加州大学攻读计算机视觉博士学位,仅用3.5年完成学业并成为该校实验室最短毕业纪录保持者。其职业经历涵盖Waymo(参与开发自动驾驶核心算法VectorNet)和Momenta(主导感知、规控等模块量产落地),兼具顶尖学术背景与智驾行业工程经验,为星海图确立了“一脑多形”的技术路线。
 星海图联合创始人赵行
星海图联合创始人赵行联合创始人赵行为清华大学交叉信息研究院助理教授、博士生导师,MIT博士毕业,主攻多模态学习与机器人移动技术。他曾任职Waymo研究科学家,入选福布斯中国U30科学榜,发表AI领域顶级论文70余篇,累计引用超1.6万次。在星海图负责视觉感知与移动导航技术,主导研发空间智能引擎RSR,推动机器人三维环境理解能力的突破。

星海图联合创始人许华哲
联合创始人许华哲清华大学交叉信息研究院助理教授、具身智能实验室(TEA Lab)负责人,UC Berkeley博士、斯坦福大学博士后。其研究方向涵盖深度强化学习与机器人控制,提出的3D扩散策略DP3大幅提升机器人操作效率(仅需10次演示即可完成任务),被业界评为“世界最优模仿学习架构”。他主导的具身基础模型EFM为星海图机器人操作智能提供核心算法支撑。

核心产品方面,2024年5月星海图发布旗下首款产品机械臂A1,该产品主打高动态性能:最大线速度10m/s、末端加速度40m/s²,额定负载2kg(峰值5kg),覆盖轻工业分拣、装配等场景,定价3.98万元起。其自主研发的准直驱电机和矢量控制底盘X1成为硬件核心,支持实时轨迹生成与高精度操作。

2024年10月,星海图发布全尺寸轮足双臂仿人形机器人R1,全身20自由度,双臂峰值负载10kg,配备500TOPS算力平台、360°激光雷达及多模态传感器(包括200万像素双目相机和5200万像素环视相机),支持复杂环境下的移动与操作。该产品采用独立电池/风道设计,兼容Isaac Sim等仿真平台,成为科研与工业场景的通用载体。
2025年1月公司正式推出R1系列三款机型,分别为R1 Pro、R1标准版和R1 Lite。

双七轴力控机械臂R1 Pro(26自由度)支持灵巧手操作,内置力传感器与腕部摄像头,定位高端科研与工业场景。双六轴机械臂R1标准版(24自由度),标配夹爪,适用于物流分拣与仓储管理;轻量化双臂平台R1 Lite(23自由度),专注数据采集与教学实验,垂直工作空间达1.7m。全系列标配英伟达Jetson AGX Orin平台(200TOPS算力),定价19.9万元起,覆盖科研、制造、教育等多领域需求。
星海图自2023年9月成立以来,凭借其技术优势快速完成多轮融资,累计金额超10亿元,成为具身智能领域资本关注度最高的初创企业之一。
2023年12月星海图成立仅3个月就获得了高瓴创投、IDG资本等机构领投的数千万元融资,资金用于核心团队搭建及Real2Sim2Real空间智能引擎研发,奠定技术底层基础。
2024年6月星海图完成Pre-A轮融资,由蚂蚁集团、红杉中国联合领投,融资金额超3亿元,加速机械臂A1量产及仿人机器人R1原型开发,同时启动与清华大学、斯坦福大学的产学研合作。
2024年12月星海图完成6.8亿元A轮融资,由中金资本、博裕资本领投,老股东持续加码,资金用于北京研发中心扩建、全系列产品商业化落地及全球市场拓展。
星海图凭借“一脑多形”技术路径,核心产品R1系列机器人已进入斯坦福大学、清华大学实验室及工业头部企业供应链。虽然目前公司估值未公开披露,但市场预测其2025年估值或突破50亿元。
▍松延动力:清华系人形机器人新锐,星动纪元联创独立再启航
松延动力(Noetix Robotics)是一家专注于人形机器人研发与制造的科技公司,成立于2023年9月,总部位于北京。松延动力以“通用人工智能本体+机器人仿生”为核心方向,自主研发工业级力控与柔顺交互技术,使机器人具备精细力量感知和动态环境适应能力。

松延动力创始人、董事长姜哲源
公司核心团队由清华大学和中科院等顶尖院校的科研人才组成,创始人兼董事长姜哲源为清华大学交叉信息院博士,师从助理教授,但后期因技术路线和理念问题选择单独创业,成立了松延动力。

松延动力联合创始人张世璞
联合创始人张世璞是松延动力的战略主导者与商业运营核心人物。作为2023年“TOP35位青年投资人U35”获得者,他此前担任元璟资本高级投资副总裁,主导投资孵化过多家科技企业,积累了丰富的产业资源与资本运作经验。加入松延动力后,他推动公司快速完成5轮融资(截至2025年3月),引入天启资本、华强资本等头部机构,并兼任上海科技大学企业导师,强化产学研合作。
联合创始人兼首席科学家胡晨旭博士是公司技术研发的学术带头人。其学术背景横跨浙江大学本科与清华大学博士阶段,师从多模态学习领域专家赵行教授,在清华MARS Lab期间深耕“人脸+语音”多模态融合技术,发表多项AI模型训练与具身智能领域研究成果。他主导研发了松延动力标志性产品“仿生人脸设备Hobbs”,通过语言大模型实现类人情绪、表情与口型同步,已落地首钢园购物广场等场景。
产品线方面,松延动力拥有包括小型人形机器人“Ning”、通用全尺寸人形机器人“Song”、产品级人形机器人Dora以及仿生机器人头“Hobbs”等在内的多款人形机器人产品。

Hobbs是国内首款高自由度、可沉浸式交互的仿生机器人头,基于多模态大模型和超仿生机械结构设计,支持面部多自由度表情模拟与超低延时人机对话。其应用场景涵盖导览、娱乐、教育及心理治疗,已部署于首钢园购物广场,通过语言大模型实现情绪、口型与表情的同步。该产品还被评价为“物理实体的数字永生”技术突破。

Dora是国内首款轻量化、产品化的通用型人形机器人,身高1.2米,具备敏捷的移动能力和多自由度仿生机械臂。它搭载深度强化学习与模仿学习算法,可实现自主端起杯子、叠衣服等动作,并接入大语言模型提升语音交互与视觉识别能力。主要应用场景包括家庭服务(陪聊、看护、监测)、养老陪伴及接待导览。2024年6月升级后,Dora进一步优化了动态环境下的任务执行效率。

高性能人形机器人Ning面向科研、教育和工业场景,强调高动态响应与运动性能,适用于复杂任务执行。而N1则具备稳健的移动能力,可在复杂地形流畅行走和奔跑,并通过视觉识别模仿人类上肢动作。其自研运动控制算法支持多地形行走测试,表现出色。N2作为全尺寸高性能机器人,最大关节输出扭矩达200N·m,专为工业协作设计,支持高精度力控与柔顺交互。
融资方面,2023年11月松延动力成立仅两个月就获得首轮融资(天使轮),投资方包括水木清华校友基金、英诺天使基金等,初步验证技术路线与团队能力。2024年6月松延动力完成A轮融资,引入金沙江创投、小苗朗程、七熹投资等机构,资金用于推进人形机器人原型机研发,加速产品化进程。同年11月,松延动力完成A+轮融资,新增北京国管(北京机器人产业发展投资基金)、华控电科等战略投资者,投后北京国管成为第一大外部股东(持股9.24%),资金重点投向全尺寸人形机器人“Song”的研发与仿生交互技术突破。

松延动力前十大股东
2025年1月松延动力启动A++轮融资,由天启资本、58产业基金领投,北京未来科学城投资等跟投,加速家庭场景机器人布局,并与利亚德集团成立“具身智能机器人联合实验室”,整合光学定位与动作大模型技术。2025年2月松延动力完成A+++轮,华强资本、彬复资本等参与,资金用于量产工厂建设及商业化落地,推动产品如仿生人脸设备“Hobbs”在首钢园等场景部署。成立不到两年,松延动力已累计完成5轮融资,但均未公开披露融资金额。
▍千寻智能:中国版Figure,VILA算法提出者
千寻智能(万境千寻北京科技有限公司)成立于2024年2月,是国内首家兼具AI大脑与机器人全栈生产力级技术能力的具身智能企业。致力于打造领先的通用人型机器人和下一代具身大模型与学习算法,被称为中国版的Figure,是国内唯一具备AI+机器人生产力级全栈技术能力的具身智能公司,拥有业界领先的具身大模型技术和机器人研发能力,在预训练模型、模仿学习和强化学习等方面核心技术优势突出。

千寻智能创始人韩峰涛
创始人兼CEO韩峰涛是珞石机器人前CTO,主导交付超2万台工业机器人,具备极强的商业化能力;联合创始人高阳为清华大学交叉信息学院助理教授,师从强化学习权威Pieter Abbeel,提出全球样本效率最高的EfficientZero算法,并主导开发ViLa和CoPa模型,实现机器人在非结构化环境下的多任务泛化能力。

核心技术方面,千寻智能开发多模态具身大模型技术,基于视觉语言模型(ViLa)与部件约束模型(CoPa),千寻智能机器人能够实现任务级别的泛化能力。ViLa将视觉感知与语言指令融合,提升机器人对复杂环境的语义理解;CoPa通过物理约束建模,保障机器人在动态场景中的动作安全性与精确性,在此前演示的demo视频当中,机器人在非结构化环境下成功完成冲泡咖啡、搬运苹果等任务。
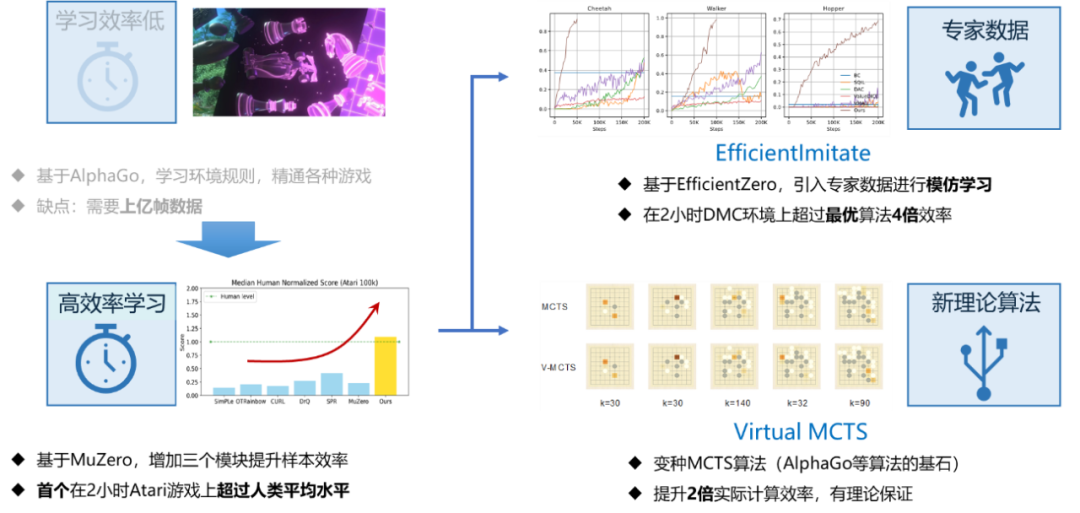
在算法构建方面,高阳提出的EfficientImitate高性能模仿学习算法,相比斯坦福的VMAIL的算法,性能提升了600%。该算法可以在相同数据量的情况下,让模仿学习的泛化性达到最高水平。他开发的高样本效率强化学习算法EfficientZero更是得到了OpenAI强化学习首席科学家John Schuman的高度评价。

CoRL 2024顶会期间,高阳团队连中四篇高水平论文。并成功发现具身智能领域的“圣杯”–Data Scaling Laws,让机器人实现了真正的零样本泛化,可以无需任何微调就能泛化到全新的场景和物体。该发现揭示了机器人对新物体、新环境以及环境-物体组合的泛化能力与训练数据量之间的幂律关系。
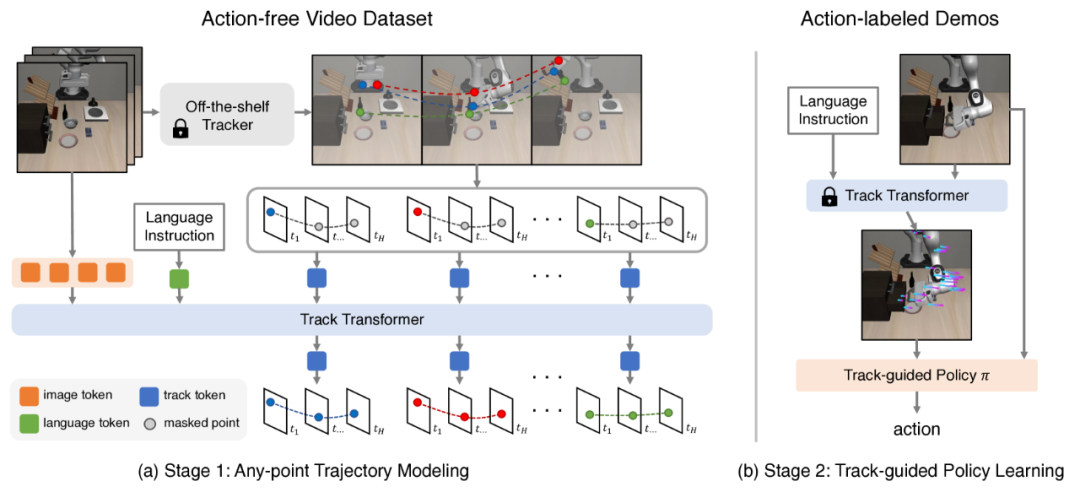
此外千寻智能高阳提出的Any-point Trajectory Model(ATM)框架,仅需少量标注数据即可完成训练,并展现出强大的鲁棒性。相较于伯克利Pieter Abbeel的UniPi算法,在长程任务中性能提升最多达到500%,ATM框架为小样本和跨具身(cross-embodied)机器人学习领域提供了新的理论支撑,并极大地拓宽了数据源的利用范围。
融资方面,2024年3月,千寻智能成立仅两个月就获得顺为资本、绿洲资本联合注资,该轮资金主要用于组建核心团队(成员来自UC Berkeley、CMU、清华、北大等顶尖机构)及技术框架搭建,初步验证了“多模态具身大模型”技术路径的可行性。
 千寻智能前十大股东
千寻智能前十大股东2024年8月千寻智能完成天使轮融资,由弘晖资本领投,达晨财智、千乘资本跟投,顺为资本与绿洲资本继续加持,融资金额达2亿元人民币。此阶段公司完成技术原型验证,推出国内首个多任务连续泛化具身模型机器人,并在新能源、物流等场景完成80+任务测试。资金重点投向产品研发与场景适配。
2024年11月千寻智能获天使+轮融资,宁德时代副董事长李平旗下的柏睿资本独家注资数千万元,此轮融资后,公司加速商业化落地。
2025年3月千寻智能即将披露Pre-A轮融资,资金将用于人才引进、模型迭代与全球化业务拓展。此轮融资后,公司估值已进入独角兽梯队。公司目标为,2025年完成首个商用场景闭环并开始小规模出货,2026至2027年实现具身大模型在各类任务中的完成率超过80%,并拓展更多应用场景。
▍加速进化:字节前高管加持,源于清华火神足球队
北京加速进化科技有限公司成立于2023年6月,总部位于北京,是一家专注于研发高行动能力人形机器人本体及运控开发平台的前沿科技企业。公司以“打造最可靠、最稳定、高精度人形机器人”为目标,致力于推动具身智能技术在工业、医疗、家庭服务等场景的落地应用。

加速进化创始人兼CEO程昊
公司创始人兼CEO程昊为清华大学自动化系本硕毕业生,师从机器人领域权威专家赵明国教授,曾在字节跳动担任高管,兼具技术研发与商业化经验。核心团队主要来自清华大学机器人控制实验室及火神机器人足球队,拥有20余年人形机器人研发经验。值得关注的是,清华大学自动化系的研究员,机器人控制实验室和无人系统中心类脑机器人中心的主任赵明国教授,担任加速进化的首席科学家,为公司的技术研发和产品创新提供了重要的指导和支持。

清华大学赵明国教授
技术层面,加速进化采用独特的“仿人腿构型”设计,通过力控关节与双足结构实现360度旋转及高动态动作,其运控算法融合模型预测控制(MPC)、强化学习(DRL)等技术,仅用三天便复现波士顿动力Atlas的复杂动作。此外,公司自主研发的准直驱力控关节与抗冲击结构,使机器人可在摔倒后自主复原,适应复杂环境。

公司首款产品Booster T1身高1.1米,体重29公斤,具备全向行走、抗干扰运动、踢球等高难度动作能力,并搭载高性能算力单元支持感知、导航及端侧大模型任务处理。该产品主打“轻巧灵活、皮实耐摔”特性,自2024年10月上市后三个月内出货量突破50台,获全球开发者认可,并计划于2025年实现小批量交付。
2023年10月,加速进化仅成立4个月就完成数千万元人民币天使轮融资,投资方包括水木创投、盈港资本和源码资本。资金主要用于核心团队搭建、人形机器人原型研发及技术验证,初步构建了全自研构型的双足机器人BR002。
2024年4月加速进化完成天使+轮融资,由水木创投、盈港资本及源码资本继续加持,但本轮融资金额并未公开。融资后,加速进化技术呈现快速突破,成功复现波士顿动力Atlas的折叠起身与旋转行走动作,引发行业关注。本轮融资后,资金重点投向运动控制算法优化与产品量产准备。

2024年5月,加速进化获得Pre-A轮融资,源码资本、水木创投联合投资数千万元人民币,加速推进首款开发者平台产品Booster T1的研发。该机器人具备全向行走、抗干扰运动及跌倒自恢复能力,计划年内量产交付。
2024年7月加速进化拿到Pre-A+轮融资,中关村科学城与连界启辰资本注资,进一步强化产学研协同。至此,公司成立一年内累计融资超2亿元,创下人形机器人领域融资速度纪录。
2024年9月加速进化再次获得Pre-A系列轮亿元级融资,由彼岸时代、民银国际、中关村科学城及iCANX基金共同出资,老股东英诺天使跟投。此轮资金主要用于通用本体迭代、软件开发能力提升及全球化市场拓展。截至2025年3月,加速进化估值已跻身独角兽梯队。
▍银河通用:专注具身智能 1年半累计融资12亿 获2024年“融资标王”
北京银河通用机器人有限公司(简称“银河通用”)成立于2023年5月19日,专注于具身智能(Embodied AI)领域,致力于研发通用人形机器人技术与产品。公司成立仅一年半便完成累计超12亿元融资,创下国内人形机器人领域早期融资纪录,投资方包括美团战投、IDG资本、经纬创投、上汽集团恒旭资本等头部机构,成为2024年行业“融资标王”。

创始团队由学术与产业双线领军人物组成。创始人王鹤,本科曾毕业于清华大学电子系,拥有清华大学的学术背景,现任北京大学助理教授、博士生导师,斯坦福大学计算机博士,在三维视觉和具身大模型领域发表近40篇顶刊论文;联合创始人姚腾洲师从北航王田苗教授,拥有ABB机器人研发及千万级智能硬件量产经验。
银河通用作为具身智能领域的标杆企业,其核心技术与产品构建了三大技术壁垒,在合成数据驱动的多模态大模型方面,银河通用自主研发全球首个“通用具身大模型”(VLA模型),采用“大脑+小脑”协同框架。
银河通用研发了世界上第一个基于机器人单视角视频流的端到端导航大模型 Navid,它无需建图,也无需除机器人视角RGB外的其他传感器信号,即可实现机器人的自主导航。
此外,银河通用还研发了世界上第一个支持开放语义指令六自由度取放的空间智能大模型系统 Open6DOR 及对应 Benchmark,有效降低了复杂场景部署门槛与人工标注成本。
银河通用采用大规模合成数据(占比高达90%)训练具身大模型,解决了传统数据采集成本高、效率低的问题。其首代产品Galbot G1在未使用真实数据的情况下,实现了95%的泛化抓取成功率,尤其在透明物体等复杂场景中表现突出。

2024年6月,银河通用旗舰产品Galbot G1发布,该轮式双臂机器人采用“双臂+单腿+轮式底盘”结构,身高1.73米可折叠至0.8米,臂展700mm覆盖2.4米作业范围,单臂负载5kg。配备16自由度仿人灵巧手,单指负载1.5kg支持高精度堆叠,结合吸盘/夹爪双模末端执行器,实现开柜、晾衣等复杂操作。其全向移动底盘支持360°灵活转向,12小时续航适配工业场景。

商业化方面,银河通用Galbot G1已在美团24小时智慧药房实现药品取送全流程自动化,并在奔驰、极氪车厂执行天窗转运、拆垛等任务。2024年服贸会期间完成超1000次无人值守补货,任务成功率97%。公司通过合资企业“天奇银河”布局汽车制造万台级应用,并与博世、北大共建实验室推进AGI技术迭代。目前产品进入量产筹备阶段,预计2025年实现1.5-2亿元营收。
在融资方面,2023年银河通用成立仅一个月即获经纬创投、蓝驰创投的种子轮投资。3个月后完成天使轮融资,吸引蓝驰、经纬、源码资本、光源资本等机构。同年10月完成亿元级“天使+”轮融资,由美团战略领投,IDG资本、智源研究院等跟投,资金用于具身大模型研发与场景应用。
2024年6月银河通用完成7亿元天使轮融资,创当年国内天使轮最高纪录,美团战投、北汽产投、商汤基金等战略资本入场。11月再获5亿元战略轮融资,上汽恒旭、深创投、香港投资公司等加入,老股东持续加码。至此累计融资超12亿元,估值达数十亿元,成为准独角兽企业。

银河通用前十大股东
2024-2025年银河通用经历了资本生态构建,融资方涵盖风投基金(IDG、经纬)、产业资本(美团、北汽、上汽)、科研基金(北大燕缘、智源)及北京、上海、深圳、香港四地国资平台,形成“产-研-政”协同生态。2025年新一轮融资已在推进,预计上半年突破10亿美元估值,跻身独角兽阵营。
在价值方面,公司1年半内完成6轮融资,平均每3个月一轮,创人形机器人领域融资速度纪录;融资结构多元,既获顶级风投背书,又整合车企、AI巨头(商汤、讯飞)、地方政府资源,为技术研发(如Galbot G1机器人)和场景落地(智慧药房、汽车制造)提供强力支撑。因此,银河通用已然稳坐具身智能赛道头把交椅。
▍零次方机器人:清华大学和江淮前沿技术协同创新中心共同孵化
零次方团队早在2024 年 5 月就已成立,但零次方机器人(Zero Power Robotics)公司则成立于2025年1月,由清华大学与江淮前沿技术协同创新中心联合孵化,总部位于合肥,是安徽省本土孵化的具身智能机器人企业。公司名称源于数学中“0的0次方未定义”概念,寓意突破边界、探索无限可能的创新精神。
零次方机器人创始团队以清华大学AI&Robot实验室的00后为核心,团队兼具学术研究能力与产业经验,成员来自百度、字节跳动、科大讯飞等企业,创始人兼CEO闵宇恒为重庆大学-清华大学跨校培养的科创人才,也是清华大学AI&Robot实验室的核心人员。

闵宇恒本科就读于重庆大学国家卓越工程师学院2020级首届明月科创实验班,后通过推免进入清华大学深造。在清华大学期间,闵宇恒导师为刘厚德教授。刘厚德教授同时担任江淮前沿技术协同创新中心副主任、安徽省人形机器人重点实验室主任等职务,并参与人形机器人“启江二号”的研发。
核心技术方面,自研了物理交互世界模型算法进行运动控制,实现机器人在复杂环境下的适应性和盲走能力。在泛化操作模型上,零次方深耕垂直场景,针对机器人领域开发了专有场景泛化操作方案。聚焦特定场景的深度需求,打造可闭环、可复制的专用场景解决方案。团队对专有场景中的工序进行规范化,并结合视觉语言大模型进行场景解析,获得流程化的任务描述。在机器人实际执行过程中,通过分析任务的类别选择不同的解决方案。

2024年9月,零次方机器人发布了首款面向工厂操作的具身机器人F1。该机器人采用基于人类视频数据学习的算法,通过三维人体运动姿态感知模型提取人类关键关节运动数据,并将其映射到机器人身上,避免了传统遥操作技术的学习成本。此外,F1通过4D高斯溅射技术重建观测信息,并利用Transformer-Based Diffusion Policy驱动机器人自主完成任务,使其具备向人类学习的能力。这一技术路径通过仿真训练和强化学习,提升机器人的操作灵活性与泛化能力,最终实现超越人类专家效率的目标。目前,F1主要应用于专业工厂的专项操作,未来计划逐步拓展至更多场景,最终覆盖家庭及通用场景。
2024年10月,零次方机器人发布了首款双足人形机器人Z1。该机器人配备最高150Nm关节电机,全身具备27个自由度,载重测试极限达20kg,负载/自重比超过70%。Z1采用自研的EtherCAT通讯模组,实现了低延时高带宽的系统性能。此外,团队通过AI技术辅助设计机器人结构参数,进一步降低了能耗并提升了动态运动性能。结合自研的物理交互世界模型算法,Z1展现出优异的抗干扰能力及复杂地形适应能力,能够在多种不规则路面和复杂工况下稳定行走。

融资方面,零次方机器人在公司成立后的第二个月就迅速完成数千万元融资,但投资方暂未公开。资金用于技术研发、量产准备及市场拓展。当月,零次方机器人获得千万元级订单,目前,零次方机器人计划2025年量产500台人形机器人,覆盖服务业、教育、文娱等领域,重点验证中小企业场景的可行性。
来源:具身智能大讲堂
(文:机器人大讲堂)