

SmartBot聚焦智能机器人领域的前瞻性科研成果,旨在打造高影响力、多学科、专业性的机器人领域国际卓越期刊。
首期创刊号汇聚了一篇主编Bradley Nelson的社论和五篇综述文章:中国科学院外籍院士名古屋大学福田敏男教授团队的微纳操控研究、清华大学刘辛军教授的并联机构设计、香港中文大学张立教授的医疗机器人导航系统、浙江大学杨华勇院士团队的液压智能控制成果,以及哈工大刘英想教授的柔性驱动技术,覆盖基础理论至产业应用核心领域。欢迎各位专家学者关注!
动态封面

封面

本期目录
01 Editorial
-
题目
Advancing Intelligent Robotics for a Smarter Future: Bridging Technology and Human Potential
迈向智慧机器人技术,共创智能未来:连接科技与人类潜能
-
作者
Bradley J. Nelson
期刊主编Bradley Nelson在社论中提出当下正是机器人技术发展的历史性拐点!本期首刊的五篇文章生动诠释了机器人技术与其他学科的深度融合:从医疗机器人的精准介入到人形机器人的环境适应能力,再到新型人工肌肉的高效能量转化,这些突破正在重塑机器人的能力边界。SmartBot致力于构建技术创新与现实应用的桥梁,以此引领智能机器人向”技术卓越与社会价值并重”的未来迈进。SmartBot要成为机器人领域具有全球影响力的顶尖学术期刊,既要引领技术发展方向,也要承担科技向善的社会责任。我们期待与全球学者一道,共同描绘人机共生的未来图景。
https://doi.org/10.1002/smb2.12018
-
引用
Nelson, B.J. (2025), Advancing Intelligent Robotics for a Smarter Future: Bridging Technology and Human Potential. SmartBot, 1:
e12018. https://doi.org/10.1002/smb2.12018

扫码获取全文
02 Review Article
-
题目
Bio-Integrated Microbots: Fabrication, Actuation and Biomedical Applications
生物集成微机器人研究进展
-
作者
Huaping Wang, Jiaxin Liu, Ruhao Nie, Qing Shi, Qiang Huang, Toshio Fukuda
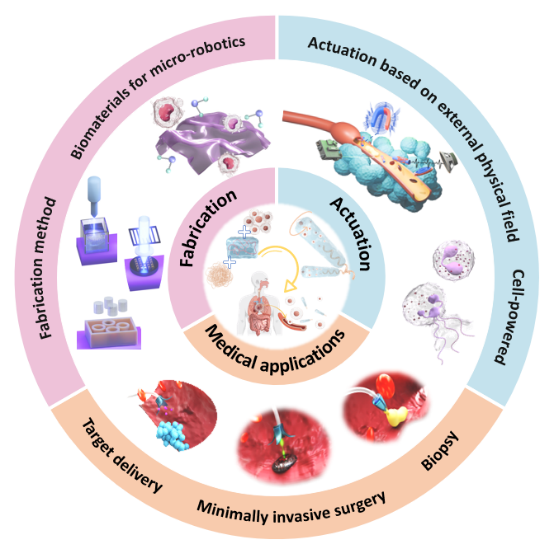
近年来,生物集成微机器人凭借其微型化设计、生物相容性和智能化作业方式,正在医学领域掀起一场技术革命。该类机器人能够深入人体复杂的生理环境,执行靶向递送、微创手术、组织活检等任务,为精准医疗等领域带来全新突破。文章探讨了生物集成微机器人的制造材料、构建方法、驱动技术及生物医学应用,并展望其未来发展趋势。
https://doi.org/10.1002/smb2.12007
-
引用
Wang, H., Liu, J., Nie, R., Shi, Q., Huang, Q. and Fukuda, T. (2025), Bio-Integrated Microrobots: Fabrication, Actuation and Biomedical Applications. SmartBot e12007. https://doi.org/10.1002/smb2.12007

扫码获取全文
03 Review Article
-
题目
Motion-Force Interaction Performance of Parallel Robotic Mechanisms
并联机器人机构运动和力交互特性
-
作者
Qizhi Meng, Andrés Kecskeméthy, Xin-Jun Liu
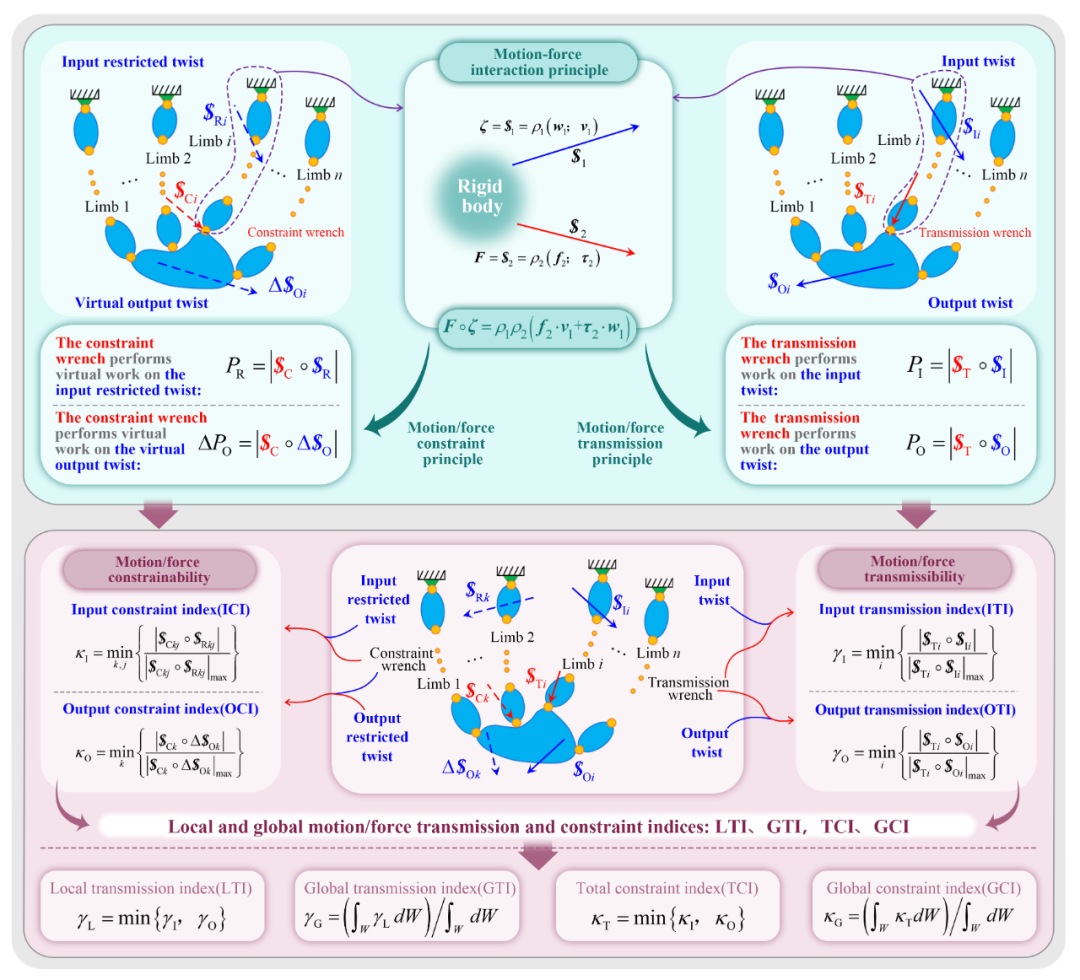
系统地回顾了并联机器人机构在运动和力交互特性方面的研究进展,深入剖析了其理论范式演化、核心研究策略、评价方法、性能指标及在机器人机构设计中的实际应用,并探讨了未来发展方向,为该领域的持续研究和创新发展提供了重要的理论参考。
https://doi.org/10.1002/smb2.12006
-
引用
Meng, Q., Kecskeméthy, A. and Liu, X.-J. (2025), Motion–Force Interaction Performance of Parallel Robotic Mechanisms. SmartBot e12006. https://doi.org/10.1002/smb2.12006

扫码获取全文
04 Review Article
-
题目
Robotic-Assisted Endovascular Embolization: Progress and Future Perspectives
基于机器人技术的血管内栓塞:研究进展与未来展望
-
作者
Yusong Peng, Xurui Liu, Kai Fung Chan, Xin Song, Li Zhang
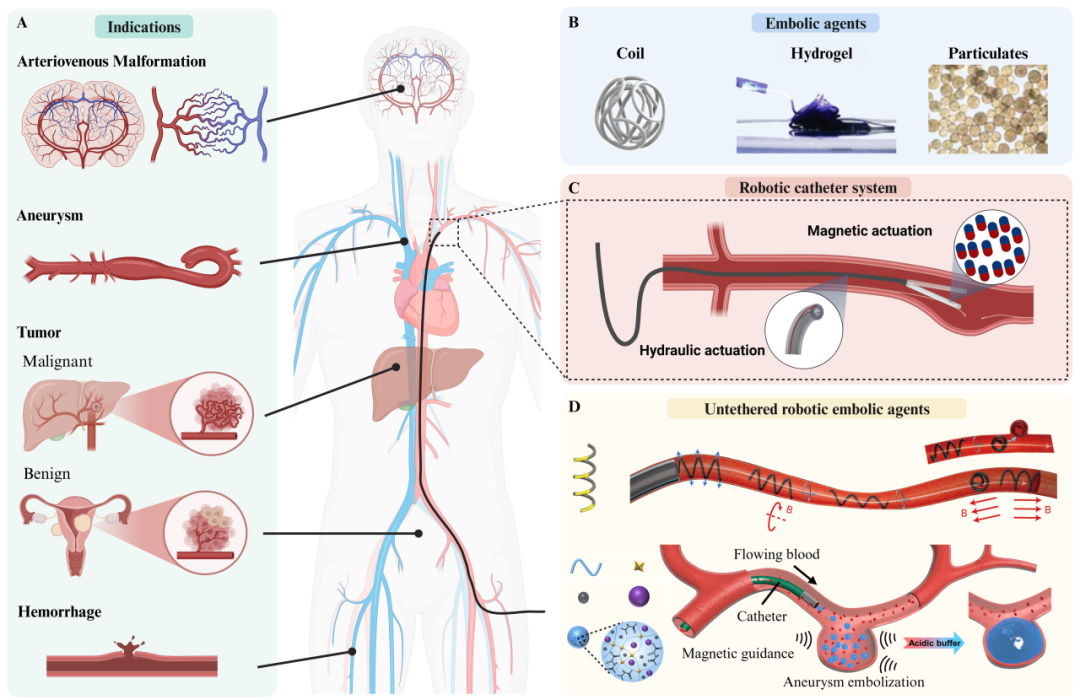
系统解析血管栓塞的病理模型与材料体系,重点探讨系留/无系留机器人技术在栓塞材料设计、场驱动机制及临床应用场景中的突破性进展,为构建智能化栓塞诊疗系统提供理论框架。
https://doi.org/10.1002/smb2.12009
-
引用
Peng, Y., Liu, X., Chan, K.F., Song, X. and Zhang, L. (2025), Robotic-Assisted Endovascular Embolization: Progress and Future Perspectives. SmartBot e12009. https://doi.org/10.1002/smb2.12009

扫码获取全文
05 Review Article
-
题目
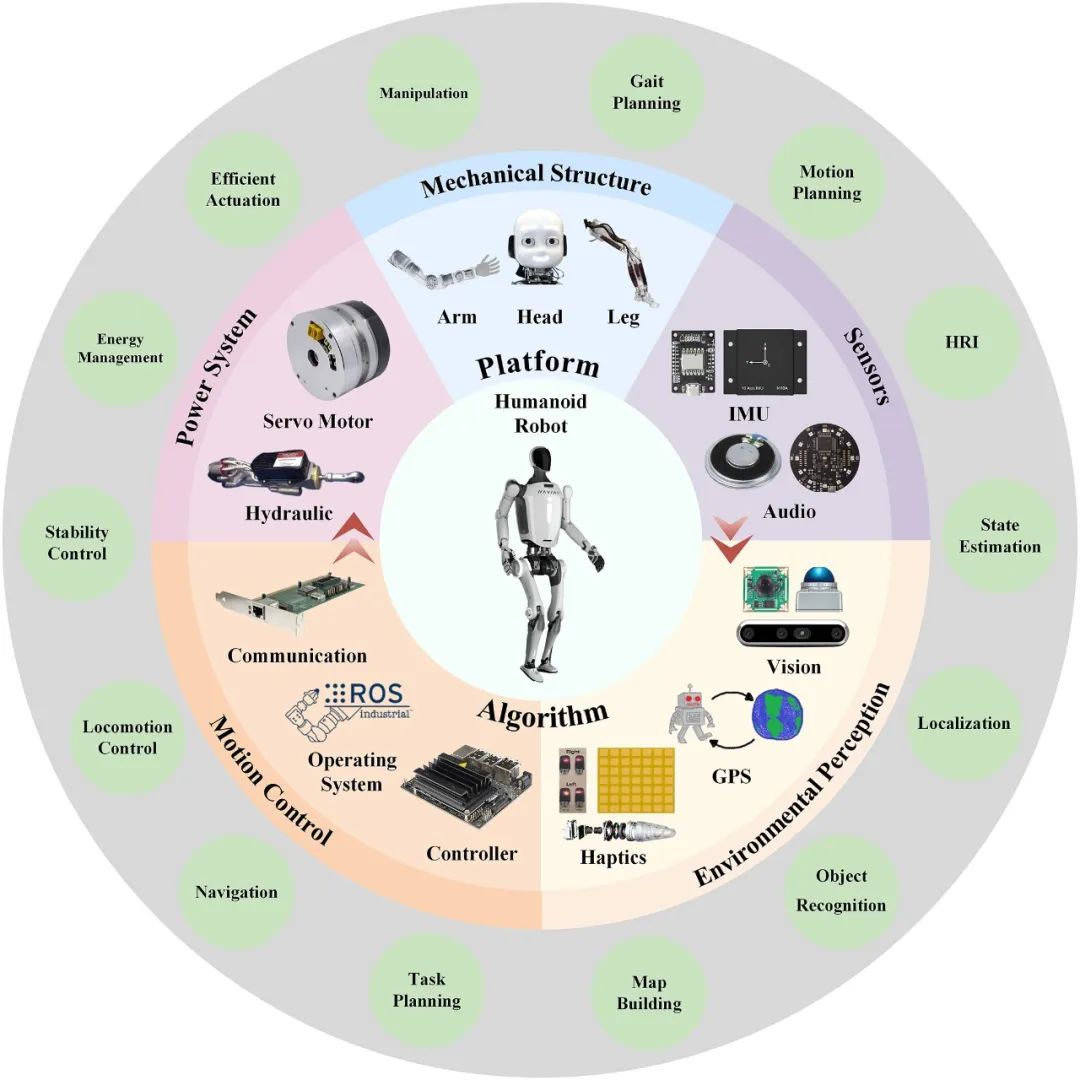
A Comprehensive Review of Humanoid Robots
人形机器人研究进展
-
作者
Qincheng Sheng, Zhongxiang Zhou, Jinhao Li, Xiangyu Mi, Pingyu Xiang, Zhenghan Chen, Haocheng Xu, Shenhan Jia, Xiyang Wu, Yuxiang Cui, Shuhao Ye, Jiyu Yu, Yuhan Du, Shichao Zhai, Kechun Xu, Yifei Yang, Zhichen Lou, Zherui Song, Zikang Yin, Yu Sun, Rong Xiong, Jun Zou, Huayong Yang
https://doi.org/10.1002/smb2.12008
-
引用
Sheng, Q., Zhou, Z., Li, J., Mi, X., Xiang, P., Chen, Z., Xu, H., Jia, S., Wu, X., Cui, Y., Ye, S., Yu, J., Du, Y., Zhai, S., Xu, K., Yang, Y., Lou, Z., Song, Z., Yin, Z., Sun, Y., Xiong, R., Zou, J. and Yang, H. (2025), A Comprehensive Review of Humanoid Robots. SmartBot e12008. https://doi.org/10.1002/smb2.12008

扫码获取全文
06 Review Article
-
题目
Recent Advances in Twisted and Coiled Artificial Muscles and Their Applications
卷绕型人工肌肉及其应用的最新进展
-
作者
Jin Sun, Shijing Zhang, Jie Deng, Jing Li, Dehong Wang, Junkao Liu, Yingxiang Liu
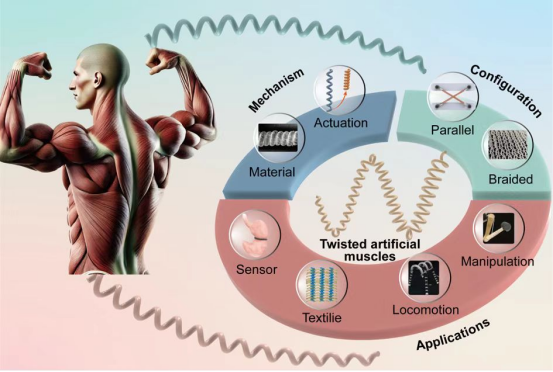
系统回顾了卷绕型人工肌肉的最新研究进展,涵盖纤维材料、驱动机制、结构形式及其在机器人领域的应用。未来研究可围绕优化材料性能、提高控制精度和拓展应用领域展开。此外,提升卷绕型人工肌肉在复杂环境中的耐久性和响应速度,对于医疗和工业领域的应用至关重要。
https://doi.org/10.1002/smb2.12005
-
引用
Sun, J., Zhang, S., Deng, J., Li, J., Wang, D., Liu, J. and Liu, Y. (2025), Recent Advances in Twisted and Coiled Artificial Muscles and Their Applications. Smartbot e12005. https://doi.org/10.1002/smb2.12005

扫码获取全文
Front Cover
SmartBot创刊号│2025年第1期│综述│名古屋大学福田敏男院士团队联合北理工王化平教授团队:生物集成微机器人研究进展
Inside Front Cover
SmartBot创刊号│2025年第1期│综述│香港中文大学张立团队:基于机器人技术的血管内栓塞:研究进展与未来展望
Inside Back Cover
SmartBot创刊号│2025年第1期│综述│浙江大学杨华勇院士等团队:人形机器人研究进展
Back Cover
SmartBot创刊号│2025年第1期│综述│清华大学刘辛军联合德国Kecskemethy教授:并联机器人机构运动和力交互特性
Frontispiece
SmartBot创刊号│2025年第1期│综述│哈工大刘英想团队:卷绕型人工肌肉最新研究进展
期刊介绍

SmartBot (Print ISSN:2998-4432,Online ISSN:2998-1891,季刊) 是由Wiley出版集团出版的开放获取英文学术期刊,已获得中国科技期刊卓越行动计划高起点新刊项目支持。
办刊愿景
SmartBot秉承“聚焦、专业、前沿、国际化”的办刊方针,聚焦智能机器人领域的前瞻性科研成果,旨在打造高影响力、多学科、专业性的机器人领域国际卓越期刊。
收稿方向
本刊发表机器人技术前沿与交叉领域的原创性研究、综述论文及短篇通讯、评论、观点等文章,包括但不限于以下方向:
-
机构学
-
机器人化制造
-
驱动控制
-
人工智能
-
传感与检测
-
人机交互
-
软体机器人
-
微纳机器人
-
医疗机器人
-
人形机器人
优势特色
1.免费发表:目前所有投稿论文均免收版面费;
5.国际化编委团队:编委成员来自20多个国家和地区,其中包括国内外院士26位。
编委会简介
由布拉德·尼尔森(Bradley Nelson)院士担任主编,刘宏院士担任编委会主任,李隆球教授担任执行主编。编委团队由来自20多个国家和地区的49位国内外机器人及相关领域知名专家和学者组成,其中包括国内外院士26位。
我们热忱欢迎
各位学者踊跃投稿!
如您有任何问题,欢迎与我们联系
投稿网址:
https://wiley.atyponrex.com/submission/dashboard?siteName=SMB2
期刊主页:
www.smartbot-journal.com

来源:SmartBot智能机器人
(文:机器人大讲堂)