
微型机器人领域再获重要突破!近日,上海交通大学研究团队成功开发出一种两栖粘附磁驱微型机器人,能够在空气和水中自如切换,实现对多种类目标的多功能操控。该研究成果近期以“Magnetically Switchable Adhesive Millirobots for Universal Manipulation in both Air and Water”为题发表在国际顶级期刊《Advanced Materials》上。


论文第一作者为上交大自动化系在读博士张志昂,通讯作者包括上交大马卓晨副教授、韩冰副教授、王贺升教授,以及吉林大学张永来教授。这一跨校合作研究项目为非结构化空间中的精密操作提供了通用解决方案,为微型机器人操控技术的发展奠定了坚实基础。
▍磁响应微粘附阵列:解决两栖操控环境挑战
无线驱动的磁性微型机器人因其实时响应和多模态运动等卓越特性,在复杂且非结构化环境中展现出巨大应用价值。然而,如何在各种目标与机器人之间建立普适且高效的交互方式,一直是该领域面临的重大挑战。
自然界中,一些寄生虫可以通过特定的物理或化学相互作用与宿主产生交互,并借此操控宿主的行为。上交大研究团队将这种“寄生操控“的概念巧妙引入机器人领域,通过精心设计,开发了双折返微阵列(DMRA)结构。
这种创新结构能够在目标与机器人之间形成可靠且可调节的粘附力,确保机器人能够稳定地抓取、操作和释放目标物体。更为关键的是,DRMA的表面引入了侧面防水结构,这一设计有效防止了水下环境中粘附力的损失,使机器人能够灵活应对干燥和水下两种截然不同的操作环境。
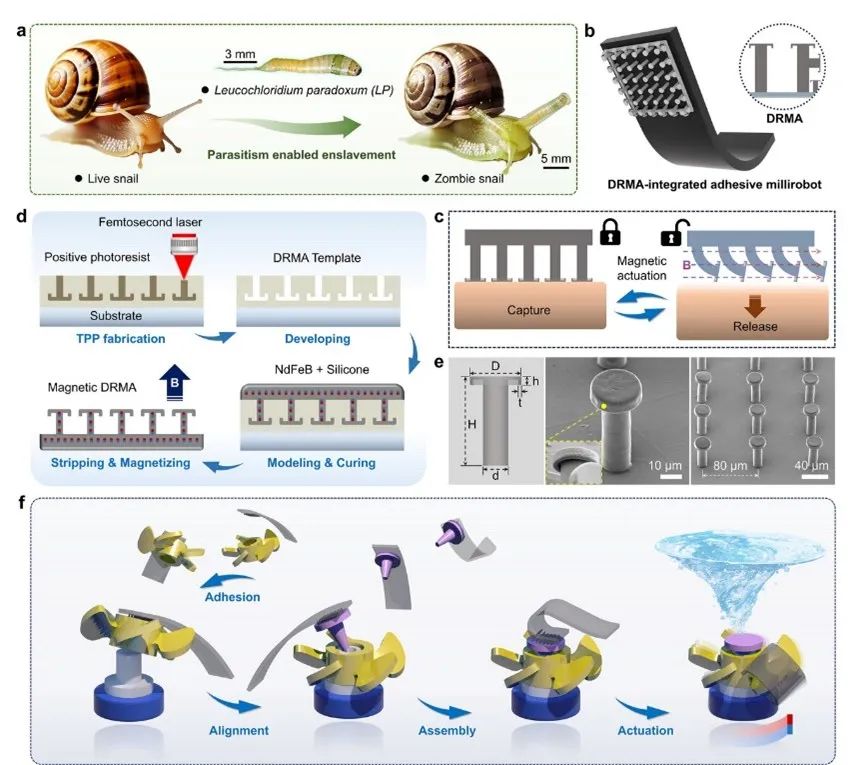
图1:两栖粘附的微型机器人设计思路
传统微型机器人在水下环境中常面临粘附能力大幅下降的问题,严重限制了其应用场景。而上交大团队开发的这种双折返微阵列结构,通过巧妙模仿自然界生物的粘附机制,成功克服了这一技术难题,为两栖环境中的精确操控提供了全新解决方案。
▍粘附界面集成:实现对任意目标的抓取与释放
研究团队将可切换粘附微阵列与机器人进行了无缝集成,使其能够在干湿环境中高效、精确地拾取和释放各种几何形状和材质的目标,展现出极强的通用性。
传统的软体机器人通常依赖“机械包裹“或“化学胶水“来实现目标操作。机械包裹法要求目标尺寸必须小于机器人本身,且无法应对大尺寸或形状复杂的目标;而化学胶水法虽然适应性较强,但释放效率较低且难以重复使用,严重限制了操作效率和灵活性。
相比之下,上交大团队基于可切换粘附界面的策略具有显著优势。无论是塑料、金属、玻璃还是有机材料等,不管形状是否规则,这款机器人都能稳定抓取。除固体目标外,DRMA还可以实现对微量液滴的无损粘附与释放,有效拓展了操作目标的类型和场景,极大提升了机器人的通用性。
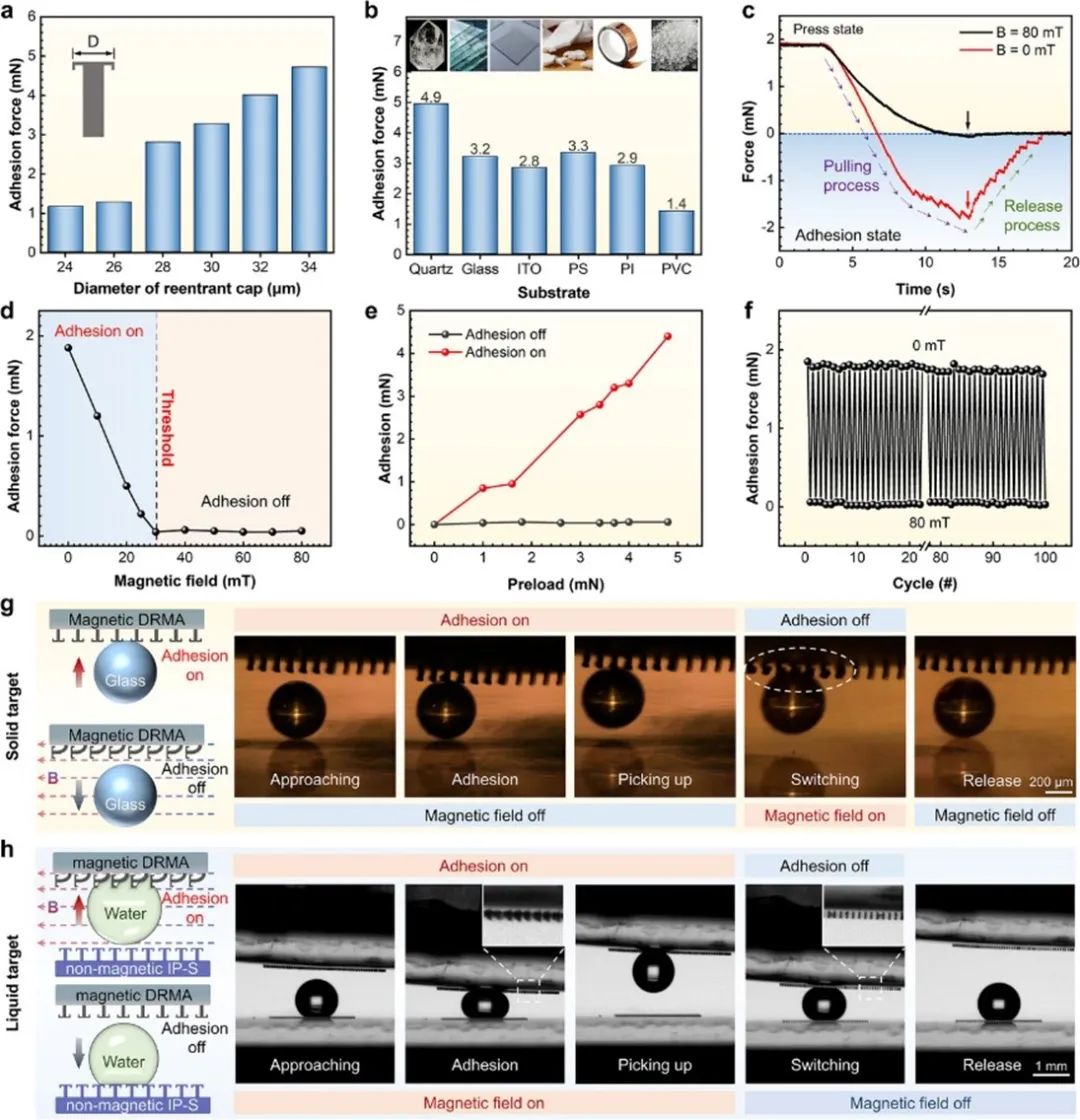
图2:粘附机器人可操控目标种类
▍多模态运动控制:助力复杂操作任务实现
除了卓越的粘附能力,研究团队还开发了具备滚动、振动、交替迈步等多种运动模式的磁驱微型机器人。这些运动模式与可切换粘附功能相结合,使机器人能够在两栖环境中完成一系列高难度任务。
在实验中,研究团队成功展示了这款微型机器人的多样化应用能力。在陆地环境下,它能够在封闭空间内精确执行短路维修等精细操作;在水下环境中,它同样表现出色,完成了微型涡轮机的组装及高速驱动等复杂任务,为水下微型设备和系统的开发提供了重要技术支持。
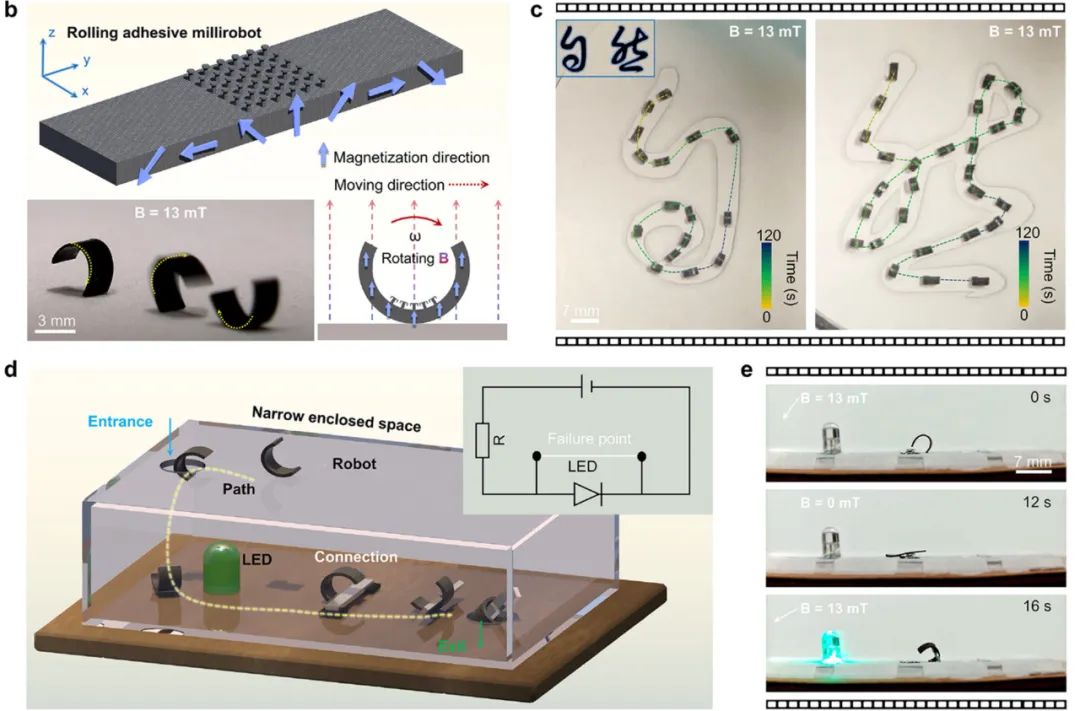
图3:封闭空间电路维修展示
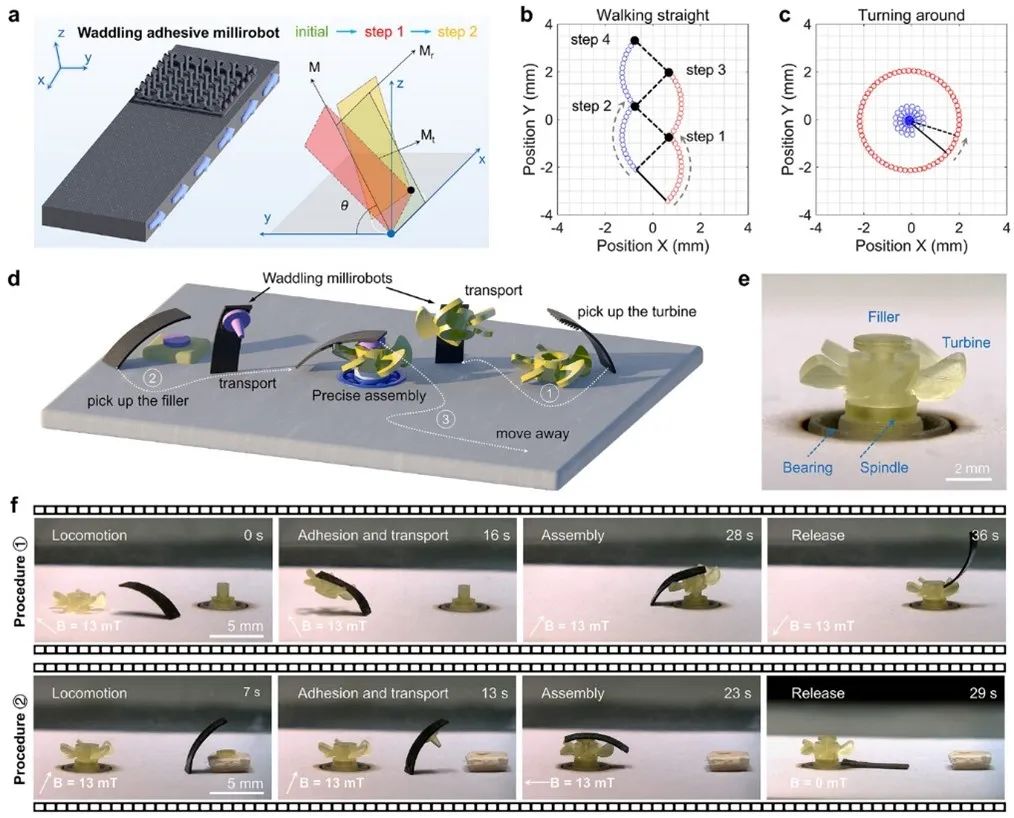
图4:磁驱动机器人精密装配展示
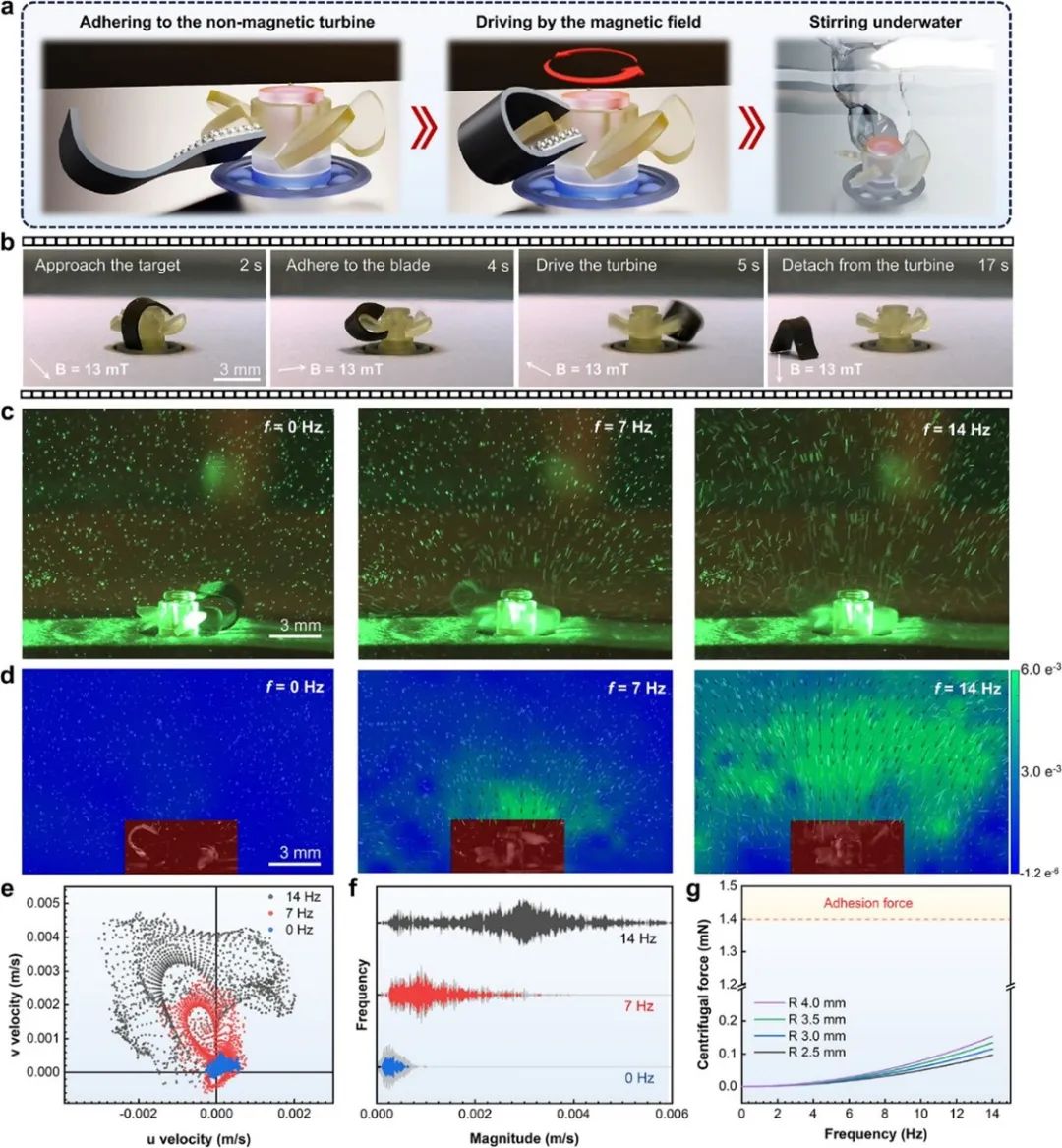
图5:水下微型涡轮受机器人粘附后高速驱动旋转
这款机器人的突出优势在于其适应性和可控性。强大而可切换的粘附能力使其能够在开放和密闭空间中自如工作,并能承受振动等极端条件。通过外部磁场精确控制,它可以灵活装载不同目标,实现高效操作。
与传统系统相比,它在目标选择方面更加灵活,释放时间更短,操作精度更高,显著拓展了微型机器人的应用前景。
考虑到其多模态运动和多目标适用性,研究人员预测,在不久的未来,这种可切换粘附机器人有望部署到活体生物表面,并实现人工的“寄生操控“,为生物医学研究和临床应用开辟新的途径。
▍结语
磁驱微型机器人技术经过数十年的发展,功能化、集成化和轻量化始终是研究的重点方向。上交大团队提出的两栖粘附微型机器人在目标适应性、响应速度、操作精度和灵活性等方面都表现出显著优势,为非磁性物体的磁性操作提供了通用解决方案,为开发多功能集成的微型机器人提供了全新思路。
随着技术的进一步完善,这种两栖粘附磁驱微型机器人有望在微电子系统维护、微型医疗设备操作、微流体控制等多个领域展现广阔的应用前景,推动微型机器人技术向更高水平发展。
论文信息: Magnetically Switchable Adhesive Millirobots for Universal Manipulation in both Air and Water.
论文链接: https://doi.org/10.1002/adma.202420045
(文:机器人大讲堂)