
想象一下,如果把我们熟悉的剪纸艺术应用到机器人设计中,会产生什么样的化学反应?最近,来自南丹麦大学软体机器人实验室的研究团队就给出了一个令人惊艳的答案。
这支研究团队成功开发出了一种基于剪纸(Kirigami)原理的充气式软体爬行机器人。这项发表在《Advanced Robotics Research》期刊上的研究,不仅在学术界引起了关注,也为软体机器人的设计开辟了新的思路。
与传统的刚性机器人不同,这种新型机器人完全由柔性纺织材料制成,通过巧妙的剪纸图案设计和气动控制,实现了类似蛇类的多种运动模式。更令人惊叹的是,这种看似简单的设计,却能让机器人在沥青路面、金属格栅、混凝土斜坡等各种复杂地形上自如爬行。
▍剪纸变形的奥秘:从平面到立体的华丽转身
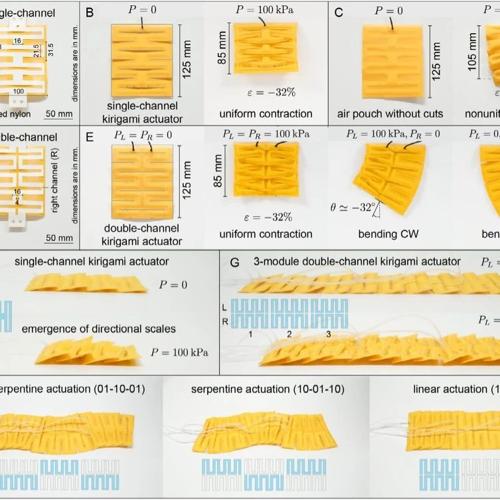
这项研究的核心创新在于将剪纸超材料(Kirigami metamaterials)的概念引入到充气式软体执行器的设计中。研究团队在热封纺织材料上引入了精心设计的交错线性切割图案,当向内部充气时,这些切口会产生协调的局部变形。
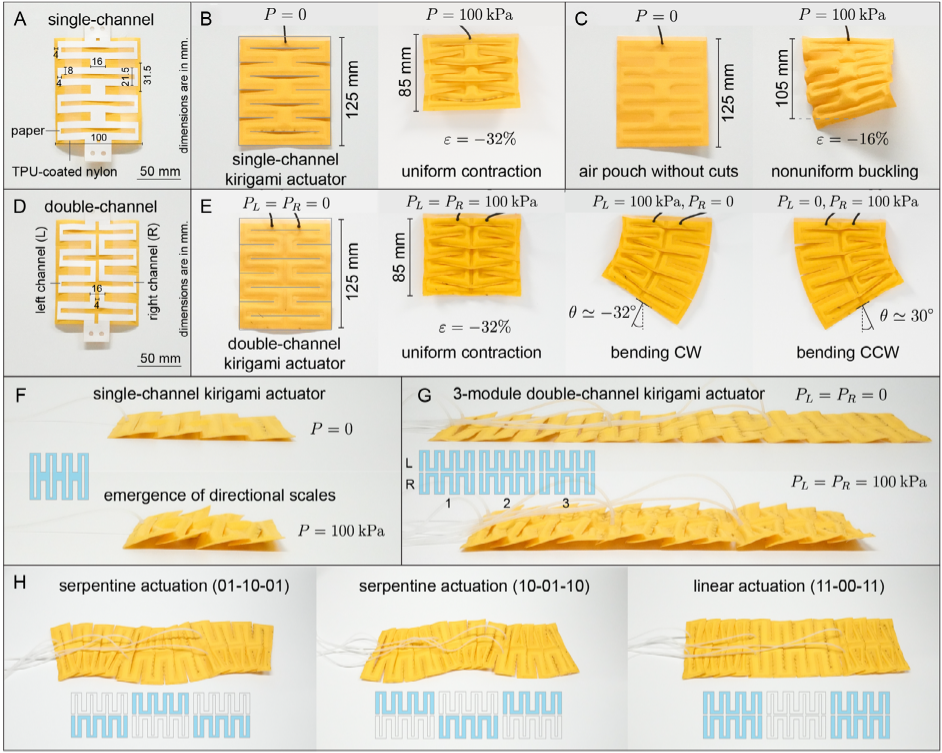
具体来说,当执行器充气到100 kPa压力时,切口的边缘会相互重叠,导致整个结构产生高达32%的均匀收缩。这个收缩率几乎是没有切口的普通气囊的两倍。更重要的是,这种收缩是均匀可控的,避免了传统充气结构常见的不可预测的局部屈曲问题。
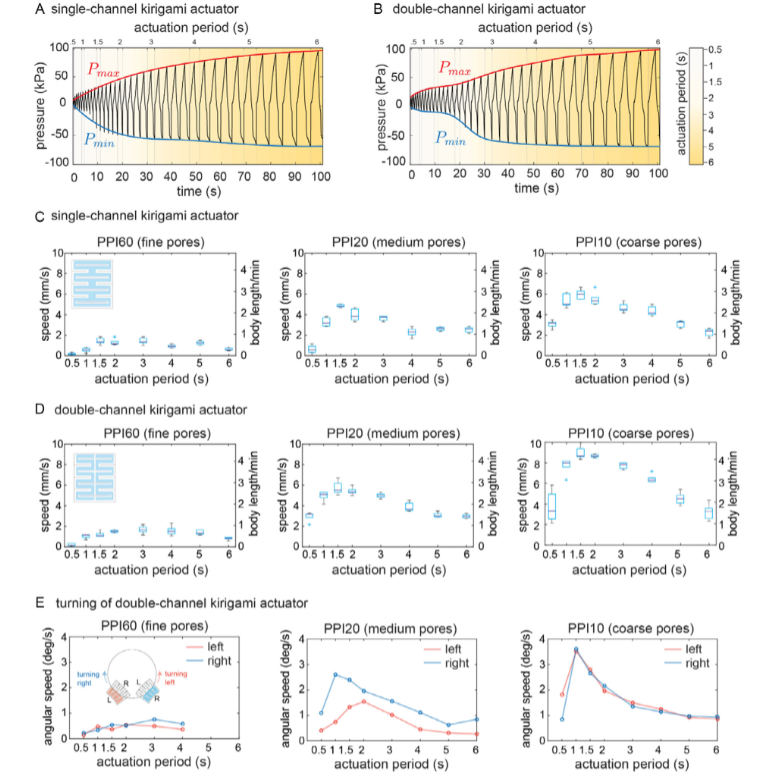
研究团队通过实验和有限元仿真深入分析了这种变形机制。他们发现,在低压阶段(0-40 kPa),气囊可以相对自由地移动,收缩速率较快;而当压力超过40 kPa后,气囊开始膨胀并通过局部旋转和重叠进行自组装,导致刚度增加,收缩速率降低。这种非线性的压力-收缩关系为精确控制提供了基础。
最引人注目的是,当这些切口协调变形时,会在表面形成类似鳞片的特征。这种不对称的表面纹理产生了方向性各向异性摩擦特性——向前的摩擦系数明显小于向后的摩擦系数,这正是蛇类爬行的关键原理。
▍模块化设计实现多样化运动
为了实现更复杂的运动控制,研究团队开发了双通道剪纸执行器。每个模块包含两个独立的平行气道,可以分别控制充气。当两个通道同时充气时,模块产生轴向收缩;当只有一个通道充气时,模块会向相应方向弯曲,实现转向功能。
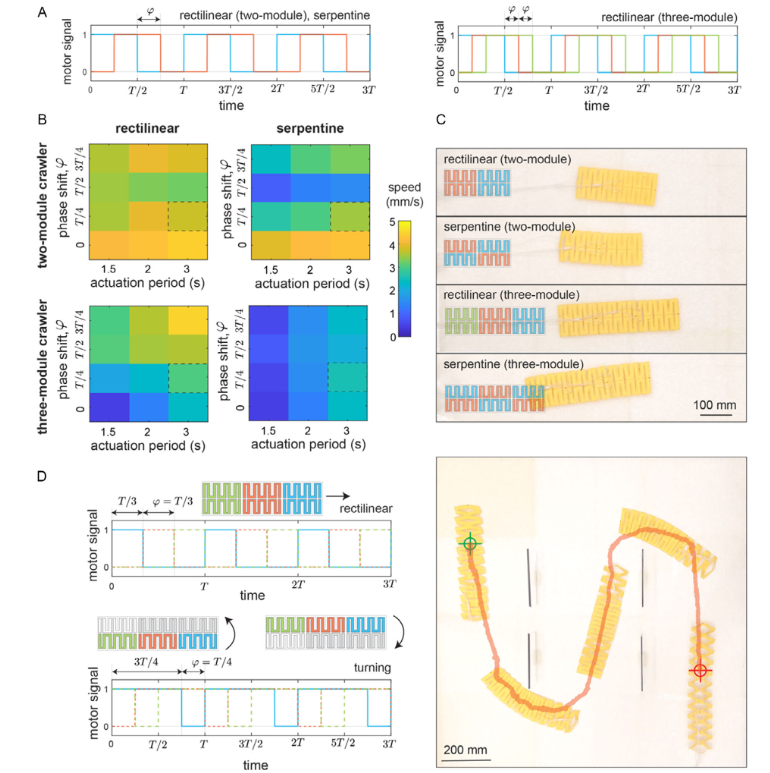
更进一步,团队将多个双通道模块串联,创造出了具有六个独立控制通道的三模块爬行机器人。通过精心设计的充气序列,这个系统可以实现多种运动模式:直线爬行、蛇形运动和转向控制。
在直线爬行模式下,每个模块的两个通道同时充气,通过引入相位差在相邻模块之间产生从头到尾的行进波。在蛇形运动模式下,相邻模块的相反通道被连接在一起,通过循环充气产生波浪形运动。实验表明,不同的致动周期和相位差对运动速度有显著影响,研究团队通过系统的参数优化找到了最佳的控制策略。
▍从实验室到真实世界的性能验证
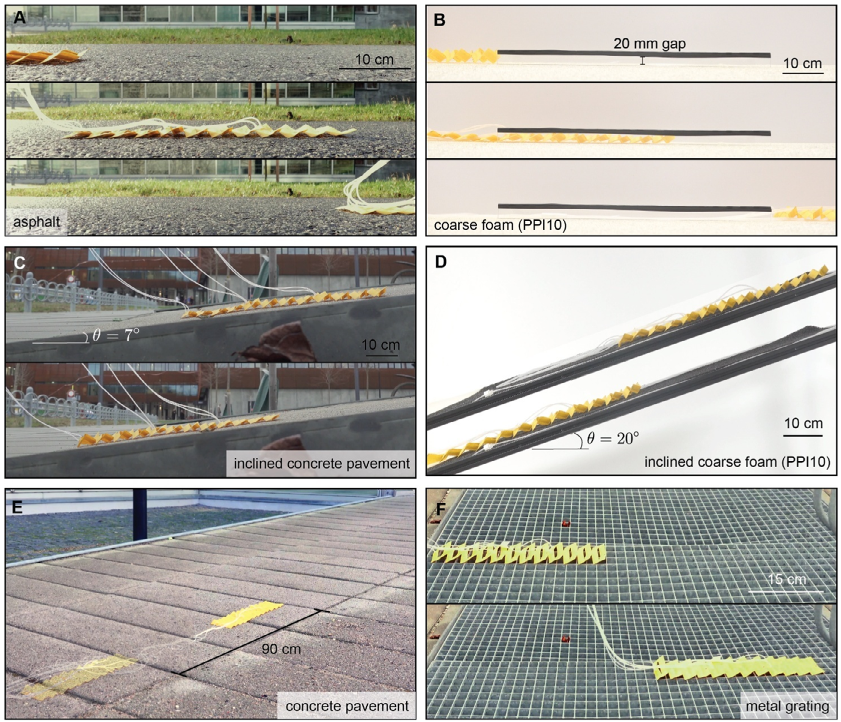
研究团队不满足于实验室环境下的测试,而是将他们的机器人带到了各种真实场景中进行验证。这些测试展示了剪纸爬行机器人惊人的适应能力。
在摩擦特性测试中,研究人员在三种不同粗糙度的聚氨酯泡沫表面上测量了机器人的摩擦系数。结果显示,充气后的剪纸执行器在所有表面上都表现出明显的方向性摩擦各向异性,向后的摩擦系数几乎是向前的两倍。这种特性确保了机器人在循环充放气过程中能够产生净向前运动。
在运动速度测试中,单通道剪纸执行器在不同表面上的最高平均速度分别达到了1.3 mm/s(细孔泡沫)、4.8 mm/s(中孔泡沫)和6.0 mm/s(粗孔泡沫)。双通道设计表现更优,相应速度提升到1.6 mm/s、5.5 mm/s和8.7 mm/s。这种性能提升归因于双通道设计减少了中央膨胀,增加了与地面的接触面积。
最令人印象深刻的是机器人在各种复杂地形上的表现。研究团队展示了机器人在沥青路面上爬行、穿越狭窄通道、攀爬7度和20度的斜坡、跨越带有缝隙的混凝土路面,甚至在金属格栅上移动的能力。在一个综合测试中,三模块机器人成功通过手动控制完成了一个S形路径,绕过刚性障碍物,全程用时19分钟。
这些实地测试不仅验证了设计的可行性,更展示了剪纸爬行机器人在非结构化环境中的巨大应用潜力。无论是搜救任务、管道检查还是环境监测,这种轻量、柔性、适应性强的机器人都可能发挥重要作用。
研究团队坦言,目前的设计仍需要外部气源和控制系统的支持,但他们使用的微型气泵和低功耗电磁阀都很紧凑轻便,为未来实现完全自主的无系留设计奠定了基础。随着模块数量的增加,协调多个气动通道的复杂性也会增加,但通过气动多路复用和分层控制等策略,这些挑战是可以克服的。
这项研究的意义远不止于创造了一个新型机器人。它展示了如何将古老的艺术形式与现代工程相结合,通过简单的几何设计实现复杂的功能。剪纸原理不仅为软体机器人提供了新的设计范式,也为其他领域如可展开结构、智能材料和仿生系统提供了灵感。有时候最先进的技术创新,可能就隐藏在最古老的艺术形式之中。
(文:机器人大讲堂)