软体机器人新突破!用剪纸原理造出的充气爬行机器人可穿越各种复杂地形
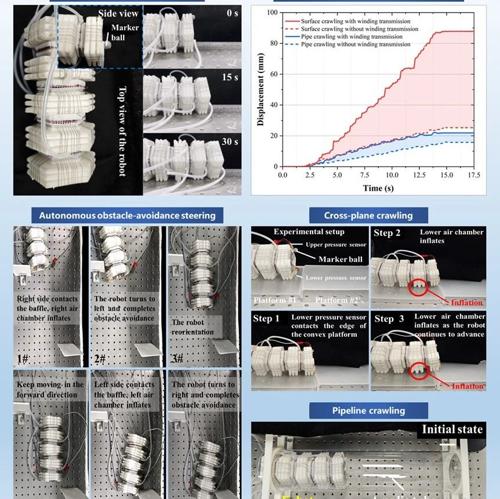
南丹麦大学团队开发出基于剪纸原理的充气式软体爬行机器人,在各种复杂地形上实现高效移动。这种机器人由柔性材料制成,通过巧妙设计和气动控制模拟蛇类运动。
南丹麦大学团队开发出基于剪纸原理的充气式软体爬行机器人,在各种复杂地形上实现高效移动。这种机器人由柔性材料制成,通过巧妙设计和气动控制模拟蛇类运动。
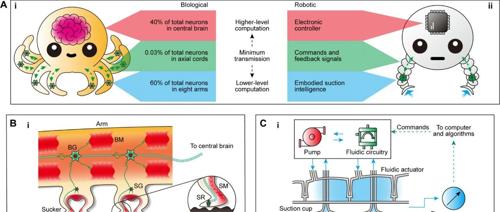
盘、臂内具身计算以及集中式高级推理功能,是面临机械自由度高、通信通道需求大等挑战的软体机器人设计的重
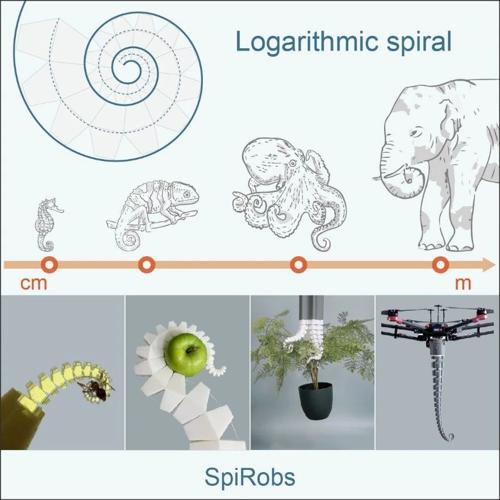
中国科学技术大学团队研发出一种基于对数螺旋线结构的软体机器人,能实现复杂场景下的多样化抓取任务。该技术具有极强的普适性和可扩展性,有望应用于工业、医疗、特种作业等多个领域。
在仿生软体游泳机器人设计领域,游泳方式各异的海洋动物是科研人员灵感的重要源泉。其中,鳐鱼以其独特的